Clear Sky Science · pt
Modelo Mask R-CNN adaptativo e leve para segmentação e classificação de instâncias de detritos submarinos visando a gestão sustentável de resíduos marinhos
Por que limpar o lixo subaquático importa
Lá no fundo, abaixo das ondas, garrafas plásticas, sacolas, redes de pesca e outros detritos se acumulam no leito marinho e flutuam em águas costeiras. Esse lixo oculto prejudica a vida marinha e dificulta o monitoramento da saúde dos oceanos. Mergulhadores, robôs subaquáticos e câmeras remotas podem ajudar, mas primeiro precisam conseguir ver e reconhecer o lixo com clareza em águas turvas e com coloração. Este estudo apresenta um novo sistema de visão computacional que permite a robôs subaquáticos identificar, contornar e classificar detritos em tempo real, mesmo quando a visibilidade é ruim, oferecendo uma ferramenta poderosa para futuros esforços de limpeza marinha.
Problemas para enxergar claramente sob o mar
Cenas subaquáticas são muito mais difíceis de interpretar do que fotos tiradas no ar. À medida que a luz atravessa a água, os tons vermelhos desaparecem primeiro, seguidos por outras cores, deixando imagens dominadas por matizes azul-esverdeadas. Partículas suspensas espalham a luz, reduzindo o contraste e adicionando uma névoa. Para um robô ou câmera que tenta localizar uma sacola plástica pálida contra um fundo marinho claro e em movimento, isso representa um desafio sério. Correções tradicionais de imagem, como ajustes simples de contraste, podem ajudar um pouco, mas frequentemente falham quando as condições mudam com a profundidade, turbidez ou iluminação. Muitos detectores por deep learning existentes ou têm dificuldade em contornar os detritos com precisão ou são pesados demais para rodar nos pequenos computadores normalmente embarcados em veículos subaquáticos autônomos.
Uma forma mais rápida e leve de detectar lixo subaquático
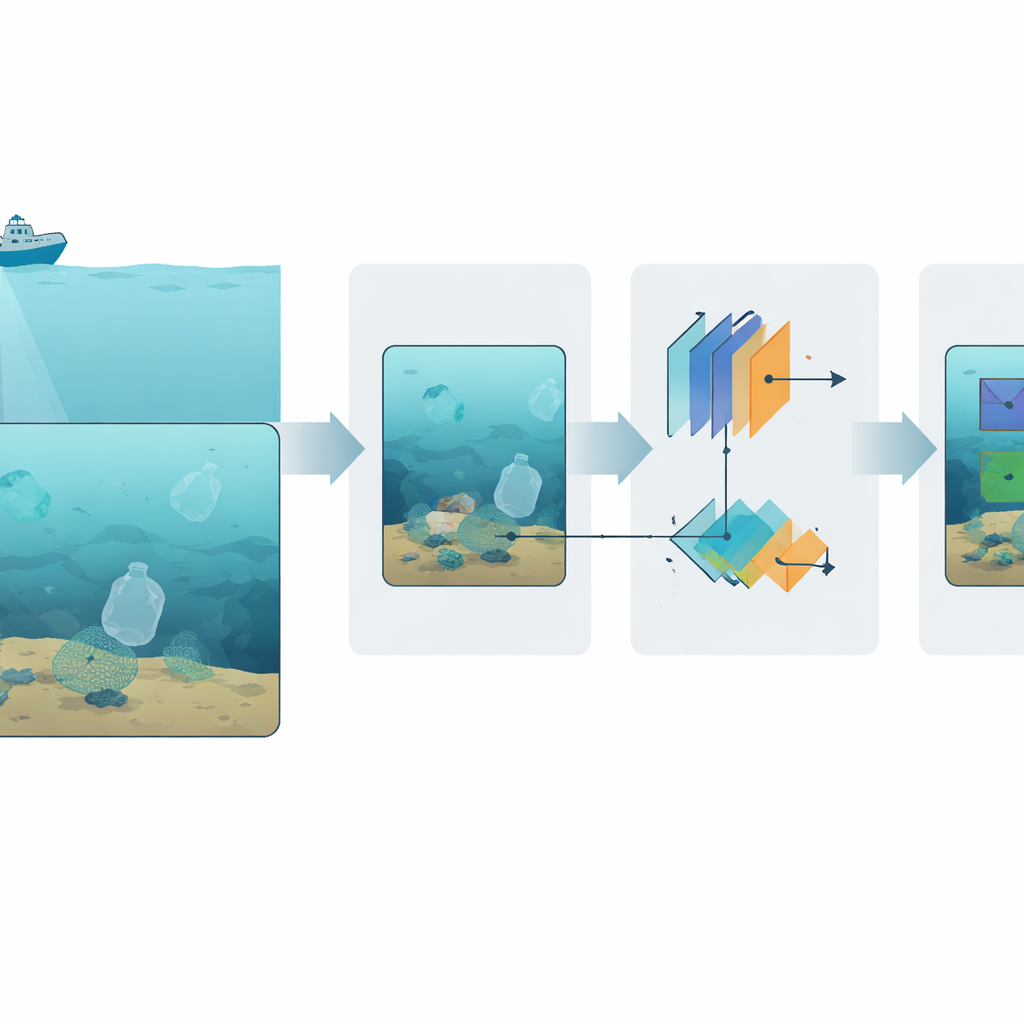
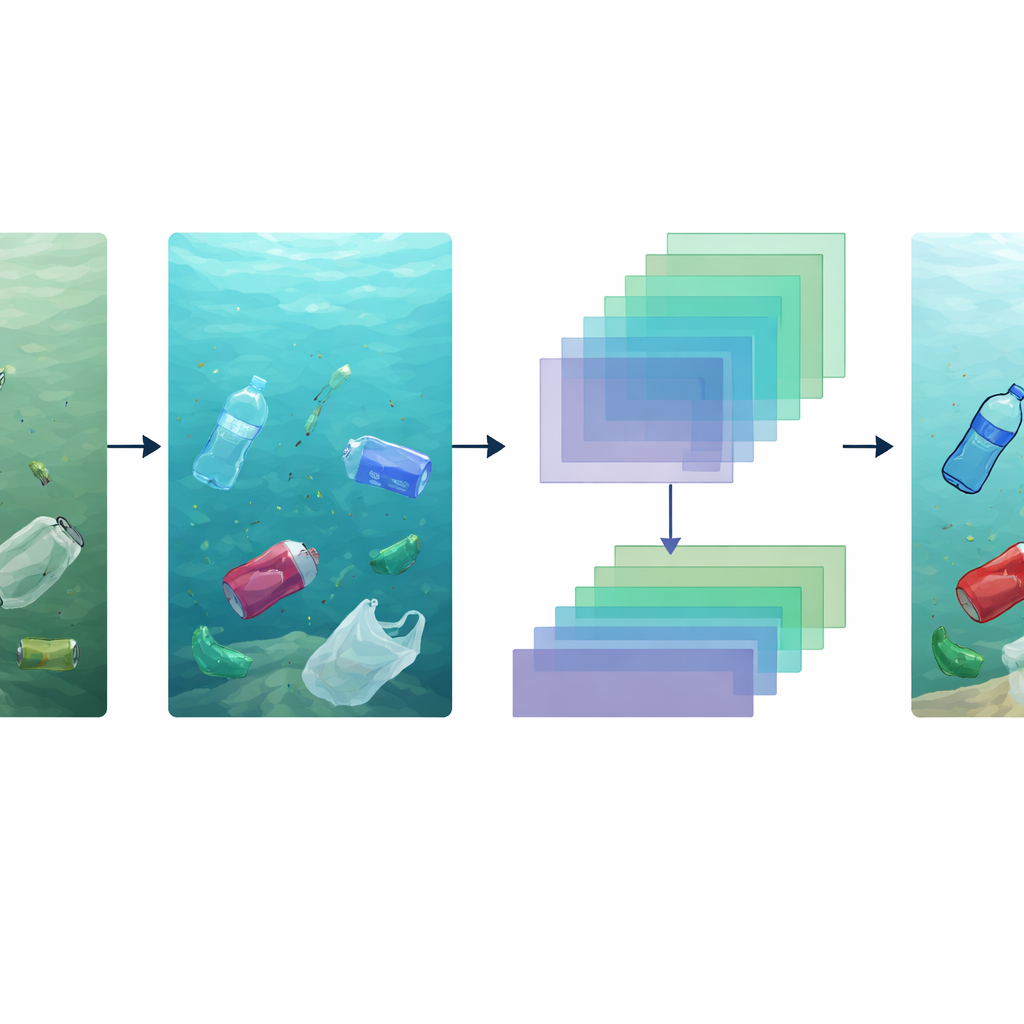
Os autores propõem um sistema “Mask R-CNN adaptativo e leve” projetado para esse ambiente severo. Em termos gerais, o sistema segue uma cadeia simples: primeiro limpa a imagem bruta subaquática, depois extrai padrões visuais-chave, propõe regiões prováveis de detritos e, por fim, desenha silhuetas precisas em torno de cada pedaço de lixo enquanto o classifica em categorias como garrafa, sacola ou rede. Para manter o sistema rápido o suficiente para uso em tempo real, ele se baseia no MobileNetV3 — uma rede neural compacta e capaz — como principal extrator de características. Essa espinha dorsal é combinada com um módulo de proposta de regiões aprimorado, ajustado para encontrar detritos pequenos, irregulares e parcialmente ocultos, uma situação comum em leitos marinhos lotados.
Fazendo imagens turvas parecerem mais naturais
Um ingrediente central é um módulo dedicado de realce que opera antes da detecção. Esse módulo é treinado para reverter os efeitos físicos da água sobre a luz, orientado por um modelo de como diferentes cores se desvanecem com a profundidade. Uma rede neural convolucional estima a distância que a luz percorreu pela água e o quanto cada canal de cor foi absorvido, depois reconstrói uma versão mais clara e com aparência mais natural da cena. Passos adicionais ajustam o brilho, esticam o contraste e reduzem suavemente o ruído, produzindo imagens com bordas mais nítidas e cores mais realistas. Essas correções tornam muito mais fácil para as etapas posteriores do sistema identificar garrafas, sacolas e outros itens contra fundos ocupados e de baixo contraste.
Como o sistema aprende a contornar detritos
Uma vez que a imagem é realçada, o MobileNetV3 a converte em conjuntos de mapas de características que resumem formas, texturas e padrões de cor em múltiplas escalas. Um módulo de proposta aprimorado funde informações de várias dessas escalas para poder lidar tanto com redes grandes quanto com pequenos pedaços de plástico. Em vez de depender de tamanhos de templates escolhidos manualmente, ele aprende formatos de âncoras a partir dos dados de treino e enfatiza aqueles que melhor combinam com a cena, reduzindo alarmes falsos. Para cada região promissora, um ramo final refina os limites usando um método de amostragem preciso que preserva detalhes finos ao longo das bordas. O resultado é uma máscara que traça o contorno de cada objeto, não apenas uma caixa delimitadora grosseira, o que é crucial ao estimar quanto lixo há ou ao planejar a apreensão e a coleta robóticas.
Comprovando desempenho em condições realistas
A equipe treinou e testou o sistema em vários conjuntos de imagens de detritos subaquáticos, incluindo cenas desafiadoras com forte névoa, baixa luminosidade e distorção de cor. Para imitar mergulhos reais, eles também usaram truques de aumento de dados, como variações de contraste, espelhamentos e desfoques. O modelo melhorado alcançou uma precisão média (mAP) de cerca de 88% e uma pontuação de sobreposição acima de 83%, superando tanto um Mask R-CNN padrão quanto detectores one-shot mais rápidos, como variantes do YOLO, ao mesmo tempo em que ainda rodava em cerca de 30 quadros por segundo. Teve bom desempenho em diferentes tipos de plásticos — de garrafas e sacolas a microplásticos — e manteve boa precisão mesmo em conjuntos de dados não vistos anteriormente e em água de alta turbidez, indicando que pode se adaptar a condições de campo variadas.
O que isso significa para oceanos mais saudáveis
Em termos simples, o estudo mostra que agora é possível construir sistemas de visão compactos que não só encontram lixo subaquático, mas também o contornam e o classificam com precisão em tempo real a bordo de pequenos robôs subaquáticos. Ao combinar limpeza de imagem consciente da física com um pipeline eficiente de detecção e segmentação, a abordagem proposta alcança um equilíbrio prático entre velocidade e precisão. Tais sistemas poderiam equipar futuras frotas de veículos autônomos que mapeiam pontos críticos de detritos, rastreiam como o lixo se move com as correntes e auxiliam em operações de limpeza direcionadas. Embora sejam necessários trabalhos adicionais para lidar com tipos raros de detritos e uma gama mais ampla de condições de água, esta pesquisa marca um passo concreto rumo a uma gestão de resíduos marinhos mais inteligente e sustentável.
Citação: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
Palavras-chave: detecção de detritos submarinos, poluição marinha, visão computacional, veículos submarinos autônomos, resíduos plásticos