Clear Sky Science · he
מודל Mask R-CNN קל משקל אדפטיבי למקטוע ואמידת אשפתית תת-מימית לצורך ניהול פסולת ימית בר-קיימא
למה חשוב לנקות אשפה מתחת לפני הים
הרחק מתחת לגלים, בקבוקים מפלסטיק, שקיות, רשתות דיג ופסולת אחרת מצטברת על קרקעית הים ונסחפת במימי החופים. האשפה החבויה הזו פוגעת בחיי הים ומקשה על ניטור בריאות האוקיינוסים. צוללנים, רובוטים תת-מימיים ומצלמות מרוחקות יכולים לסייע, אבל קודם עליהם לדעת לראות ולהכיר את האשפה בבירור במים עכורים בעלי גוון. מחקר זה מציג מערכת ראייה ממוחשבת חדשה המאפשרת לרובוטים תת-מימיים לזהות, לעקוב ולמיין פסולת בזמן אמת, גם בתנאי ראות לקויים, מה שמספק כלי חזק למאמצי ניקיון ימיים בעתיד.
קשיים בראייה תת-מימית
סצנות תת-מימיות קשות לפרש הרבה יותר מתמונות שנלקחות באוויר. ככל שהאור נע במים, הגוונים האדומים נעלמים ראשונים, ואחריהם צבעים אחרים, כך שהתמונות נשלטות על ידי גווני כחול–ירוק. חלקיקים תלויים מפזרים את האור, מורידים ניגודיות ומוסיפים הילה מטושטשת. עבור רובוט או מצלמה שמנסים למצוא שקית פלסטיק חיוורת על קרקעית ים בהירה ומשתנה, זה אתגר מהותי. תיקוני תמונה מסורתיים כגון התאמות ניגודיות פשוטות יכולים לעזור מעט, אך הם לרוב נכשלם כאשר התנאים משתנים בעומק, בעכירות או בתאורה. גלאי למידה עמוקה רבים מתקשים למסגר את הפסולת בדיוק או שהם כבדים מדי לפעול על המחשבים הקטנים המותקנים בדרך כלל בכלי רכב תת-מימיים אוטונומיים.
דרך מהירה וקלילה יותר לזהות אשפה תת-מימית
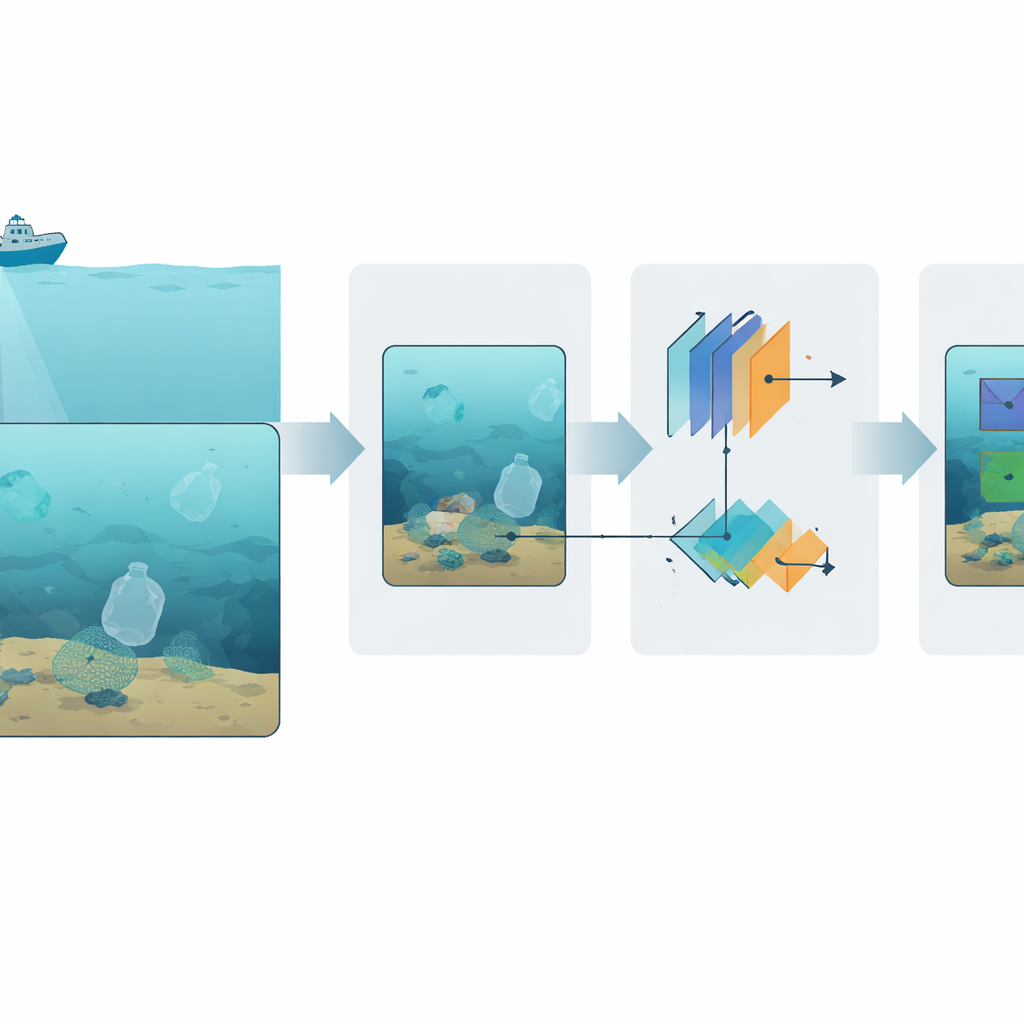
המחברים מציעים מערכת "Mask R-CNN קל משקל אדפטיבית" המותאמת לסביבה הקשה הזו. ברמת עיקרון, המערכת פועלת ברצף פשוט: קודם מנקים את תמונת המים הגולמית, אחר כך מחלצים תבניות חזותיות מרכזיות, לאחר מכן מציעים אזורים סבירים של פסולת ולבסוף מציירים קווי מתאר מדויקים סביב כל פריט ומסווגים אותו לקטגוריות כגון בקבוק, שקית או רשת. כדי לשמור על מהירות המערכת בזמן אמת, היא נשענת על MobileNetV3—רשת עצבית קומפקטית ובעלת יכולת—כיוצרת התכונות העיקרית. קו גב זה משולב עם מודול הצעת אזורים משודרג שמותאם למציאת פסולת קטנה, לא סדירה ולחלקים חלקית מוסתרים, מצב שכיח על קרקעות ים עמוסות.
להחזיר לתמונות עכורות מראה טבעי יותר
מרכיב מרכזי הוא מודול שיפור ייעודי הפועל לפני הזיהוי. מודול זה מאומן להיפך השפעות פיזיקליות של המים על האור, בהנחיית מודל של אופן דהיית הצבעים בעומק. רשת קונבולוציה מעריכה עד כמה האור עבר דרך המים וכמה כל ערוץ צבע ספג, ולאחר מכן משחזרת גרסה ברורה וטבעית יותר של הסצנה. צעדים נוספים מתאימים בהירות, מותחים ניגודיות ומקטינים בעדינות רעש, ומניבים תמונות עם קצוות חדים יותר וצבעים מציאותיים יותר. תיקונים אלה מקלים משמעותית על שלבי המערכת המאוחרים לזהות בקבוקים, שקיות ופריטים נוספים על רקעים עמוסים ובעלי ניגודיות נמוכה.
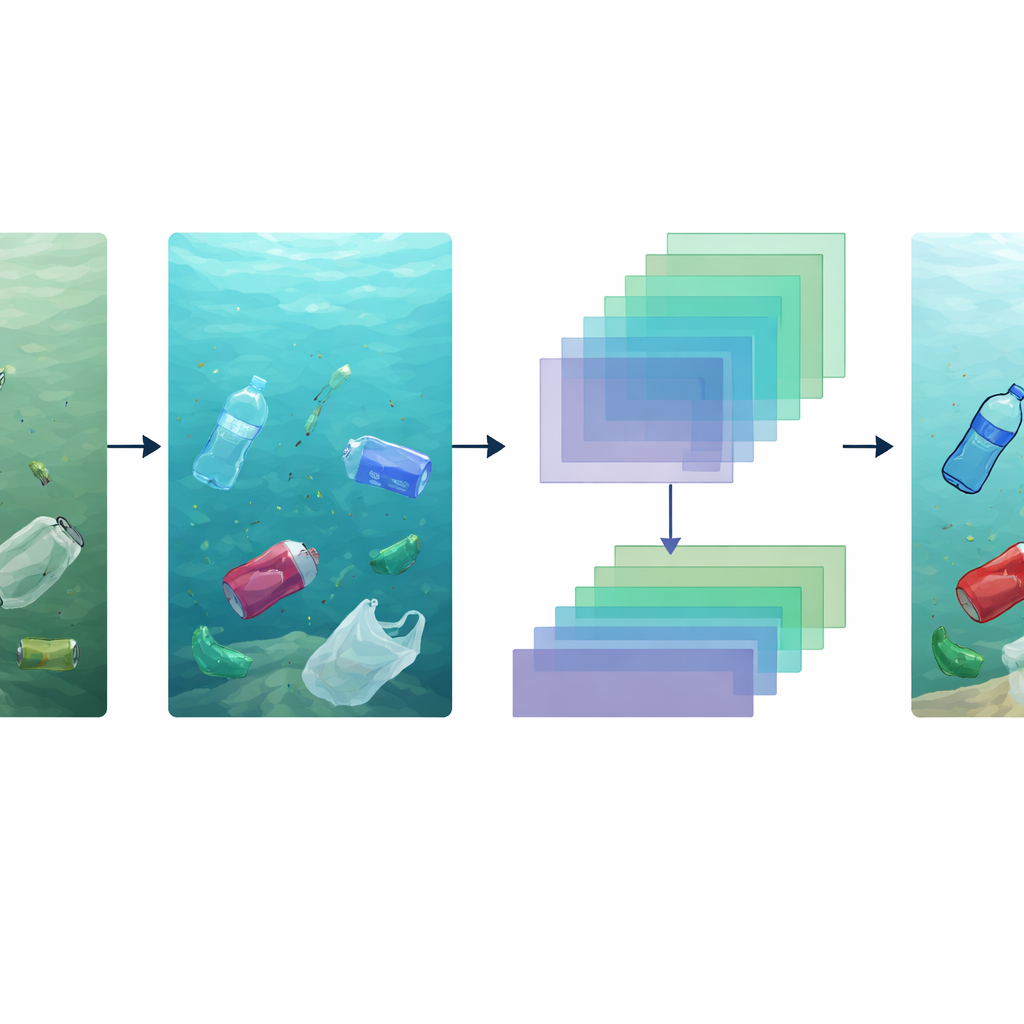
כיצד המערכת לומדת למסגר פסולת
לאחר שהתמונה מושפצה, MobileNetV3 ממירה אותה לערימות של מפת תכונות המסכמות צורות, מרקמים ודפוסי צבע בסקאלות מרובות. מודול הצעות משופר ממזג מידע ממספר מהסקאלות הללו כדי שיוכל להתמודד הן עם רשתות גדולות והן עם חתיכות פלסטיק זעירות. במקום להסתמך על גדלים תבניתיים שנבחרו ביד, הוא לומד צורות עוגן מתוך נתוני האימון ומדגיש את אלה המתאימים ביותר לסצנה, ובכך מצמצם התראות שגויות. עבור כל אזור מבטיח, סניף סופי מטייב את הגבולות באמצעות שיטת דגימה מדויקת השומרת על פרטים עדינים לאורך הקצוות. התוצאה היא מסכה שעוקבת אחרי קווי המתאר של כל עצם, לא רק תיבת גבול גסה—חשוב כשממדדים כמה אשפה קיימת או בתכנון אחיזה ואיסוף רובוטיים.
הוכחת ביצועים בתנאים ריאליסטיים
הצוות אימן ובדק את המערכת על מספר מערכי תמונות של פסולת תת-מימית, כולל סצנות מאתגרות עם הילה עזה, אור חלש ועיוותי צבע. כדי לדמות צלילות אמיתיות השתמשו גם בתחבולי הגדלת נתונים כגון שינויים בניגודיות, הסבה וטשטוש. המודל המשופר השיג דיוק ממוצע מקובל (mAP) של כ-88% וציון חפיפה מעל 83%, והעלה על ביצועי Mask R-CNN סטנדרטי ועל גלאים מהירים חד-מעגליים כגון וריאנטים של YOLO, ועדיין פעל בקצב של כ-30 פריימים לשנייה. הוא הופיע היטב במגוון סוגי פלסטיק—מבקבוקים ושקיות ועד מיקרופלסטיקה—ושמר דיוק טוב גם על מערכי נתונים שלא נראו באימון ובמים בעכירות גבוהה, מה שמעיד על יכולתו להסתגל לתנאי שדה משתנים.
מה משמעות הדבר לאוקיינוסים בריאים יותר
במילים פשוטות, המחקר מראה שניתן כיום לבנות מערכות ראייה קומפקטיות שלא רק מוצאות אשפה תת-מימית אלא גם ממסגרות וממיינות אותה במדויק בזמן אמת על גבי רובוטים תת-מימיים קטנים. על ידי שילוב ניקוי תמונות המודע לפיזיקה עם צינור זיהוי ומקטוע יעיל, הגישה המוצעת מאזנת באופן מעשי בין מהירות לדיוק. מערכות כאלה יכולות להפעיל עדרים עתידיים של כלי רכב אוטונומיים שממפים מוקדי אשפה, עוקבים אחרי תנועת הפסולת עם הזרמים ומסייעים במבצעי ניקוי ממוקדים. בעוד נדרש עוד עבודה כדי להתמודד עם סוגי אשפה נדירים וטווח רחב יותר של תנאי מים, המחקר הזה מסמן צעד ממשי לעבר ניהול פסולת ימית חכם וברי-קיימא.
ציטוט: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
מילות מפתח: גילוי אשפה תת-מימית, זיהום ימי, ראייה ממוחשבת, כלי רכב תת-מימיים אוטונומיים, פסולת פלסטיק