Clear Sky Science · pl
Adaptacyjny lekki model Mask R-CNN do segmentacji i klasyfikacji egzemplarzy zanieczyszczeń podwodnych na rzecz zrównoważonego gospodarowania odpadami morskimi
Dlaczego sprzątanie śmieci pod wodą ma znaczenie
Daleko pod falami butelki z plastiku, torby, sieci rybackie i inne odpady gromadzą się na dnie i dryfują w wodach przybrzeżnych. To ukryte śmieci szkodzą życiu morskiemu i utrudniają monitorowanie stanu oceanów. Nurkowie, roboty podwodne i kamery zdalne mogą pomóc, ale najpierw muszą umieć wyraźnie zobaczyć i rozpoznać odpady w mętnej, zabarwionej wodzie. W tym badaniu przedstawiono nowy system widzenia komputerowego, który pozwala robotom podwodnym wykrywać, obrysowywać i klasyfikować zanieczyszczenia w czasie rzeczywistym, nawet gdy widoczność jest słaba — to potężne narzędzie dla przyszłych działań porządkowych na morzu.
Problemy z wyraźnym widzeniem pod powierzchnią
Sceny podwodne są znacznie trudniejsze do interpretacji niż zdjęcia wykonane w powietrzu. W miarę jak światło przechodzi przez wodę, najpierw zanikają tony czerwone, potem inne kolory, przez co obrazy dominują niebiesko-zielone odcienie. Zawieszone cząstki rozpraszają światło, obniżając kontrast i nakładając mglistą zasłonę. Dla robota lub kamery próbujących odnaleźć jasną plastikową torbę na jasnym, zmieniającym się dnie to poważne wyzwanie. Tradycyjne poprawki obrazu, takie jak proste regulacje kontrastu, mogą trochę pomóc, ale często zawodzą, gdy warunki zmieniają się wraz z głębokością, mętnością lub oświetleniem. Wiele istniejących detektorów opartych na głębokim uczeniu albo ma problemy z precyzyjnym obrysowaniem odpadów, albo jest zbyt ciężkich obliczeniowo, by działać na małych komputerach typowych dla autonomicznych pojazdów podwodnych.
Szybszy, lżejszy sposób wykrywania śmieci podwodnych
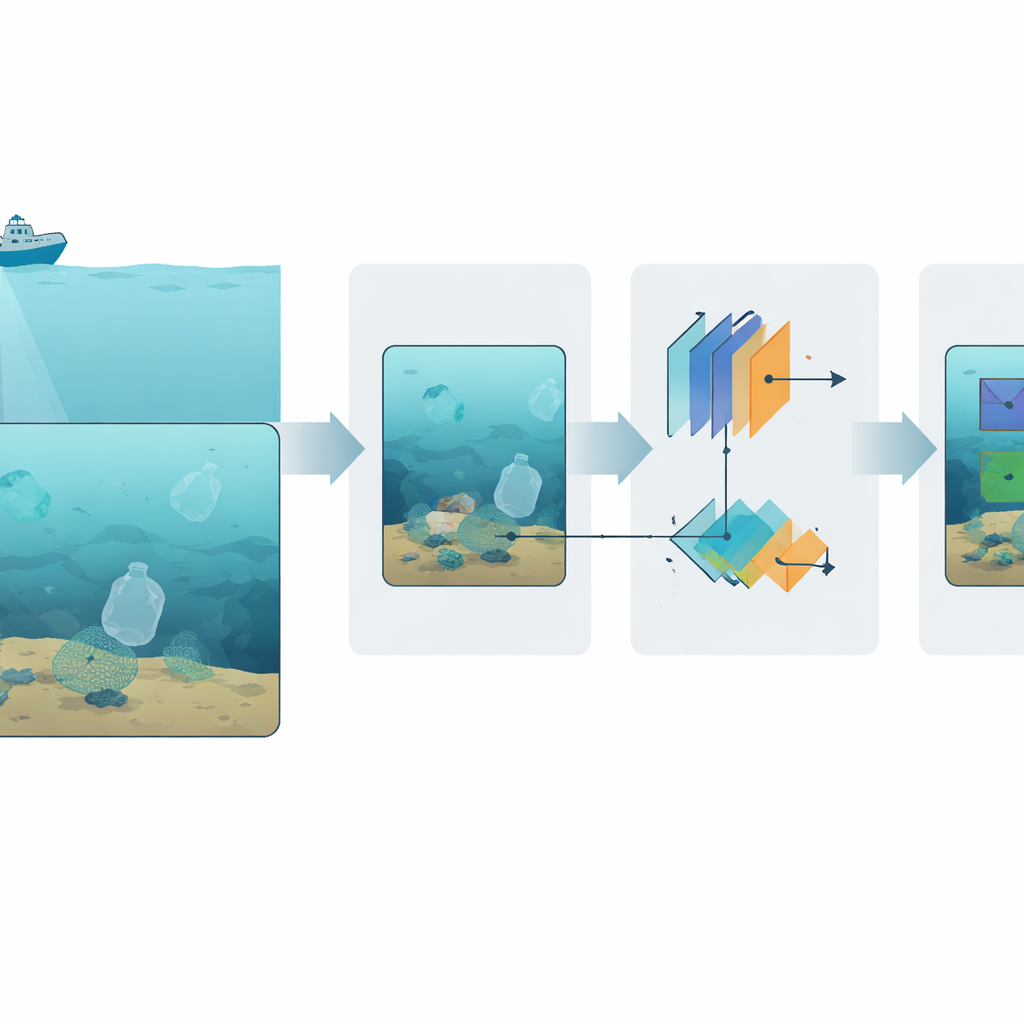
Autorzy proponują "adaptacyjny lekki Mask R-CNN" dostosowany do tego surowego środowiska. Na wysokim poziomie system realizuje prosty ciąg działań: najpierw poprawia surowy obraz podwodny, potem wydobywa kluczowe wzorce wizualne, następnie proponuje prawdopodobne regiony z odpadami, a na końcu rysuje precyzyjne sylwetki każdego fragmentu śmieci i przypisuje je do kategorii, takich jak butelka, torba czy sieć. Aby utrzymać system wystarczająco szybki do pracy w czasie rzeczywistym, opiera się na MobileNetV3 — zwartej, lecz wydajnej sieci neuronowej — jako głównym ekstraktorze cech. Ten rdzeń parowany jest z ulepszonym modułem proponowania regionów, dostrojonym do wykrywania małych, nieregularnych i częściowo ukrytych odpadów, co jest częstym zjawiskiem na zanieczyszczonych dnach morskich.
Sprawianie, by mętne obrazy wyglądały bardziej naturalnie
Kluczowym składnikiem jest dedykowany moduł poprawy obrazu, działający przed etapem detekcji. Moduł ten jest trenowany, aby odwracać fizyczne skutki działania wody na światło, korzystając z modelu pokazującego, jak różne kolory tracą intensywność z głębokością. Splotowa sieć neuronowa szacuje, jak daleko światło przebyło przez wodę i jak silnie każdy kanał kolorów został pochłonięty, a następnie odbudowuje jaśniejszą, bardziej naturalnie wyglądającą wersję sceny. Dodatkowe kroki regulują jasność, rozciągają kontrast i łagodnie redukują szum, dając obrazy z ostrzejszymi krawędziami i bardziej realistycznymi kolorami. Te korekty znacznie ułatwiają późniejszym etapom systemu wyodrębnianie butelek, toreb i innych przedmiotów na złożonym, niskokontrastowym tle.
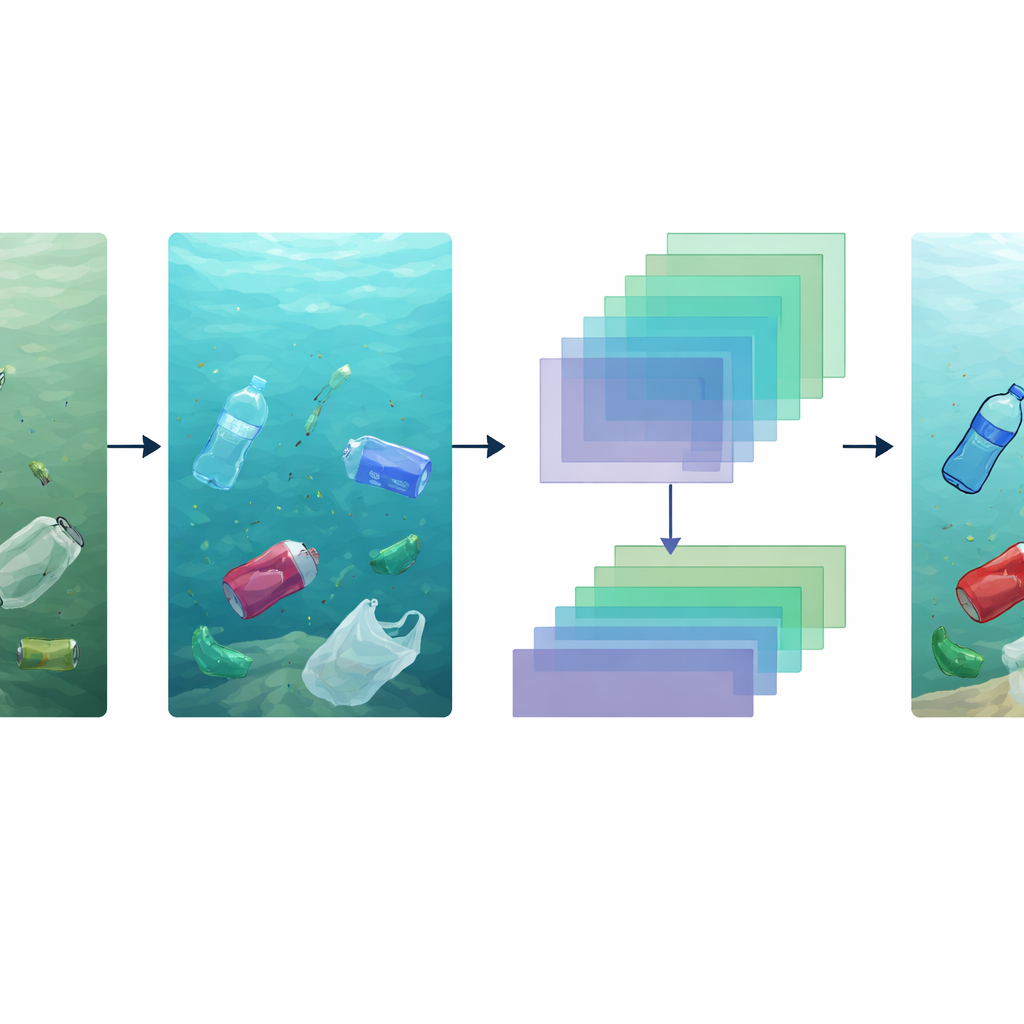
Jak system uczy się obrysowywać odpady
Po poprawieniu obrazu MobileNetV3 zamienia go w zestawy map cech, które podsumowują kształty, tekstury i wzory kolorystyczne na wielu skalach. Ulepszony moduł proponowania regionów łączy informacje z kilku z tych skal, dzięki czemu radzi sobie zarówno z dużymi sieciami, jak i drobnymi kawałkami plastiku. Zamiast polegać na ręcznie dobranych rozmiarach szablonów, uczy się kształtów kotwic (anchorów) z danych treningowych i faworyzuje te, które najlepiej pasują do sceny, zmniejszając liczbę fałszywych alarmów. Dla każdego obiecującego regionu końcowy branch dopracowuje granice, używając precyzyjnej metody próbkowania, która zachowuje drobne detale wzdłuż krawędzi. Efektem jest maska odzwierciedlająca kontur każdego obiektu, a nie tylko przybliżający prosty prostokąt ograniczający — co jest kluczowe przy szacowaniu ilości odpadów lub planowaniu chwytania i zbierania przez roboty.
Potwierdzanie wydajności w realistycznych warunkach
Zespół trenował i testował system na kilku zbiorach obrazów z odpadami podwodnymi, w tym w wymagających scenach z silną mgłą, słabym oświetleniem i zniekształceniami kolorów. Aby naśladować prawdziwe nurkowania, użyto także sztucznych zabiegów augmentacyjnych, takich jak zmiany kontrastu, odbicia i rozmycia. Ulepszony model osiągnął średnią precyzję (mAP) na poziomie około 88% i wskaźnik nakładania się ponad 83%, przewyższając zarówno standardowy Mask R-CNN, jak i szybsze detektory jednowarstwowe, takie jak warianty YOLO, przy jednoczesnym zachowaniu prędkości około 30 klatek na sekundę. Dobrze radził sobie z różnymi rodzajami plastiku — od butelek i toreb po mikroplastiki — i utrzymywał dobrą dokładność nawet na wcześniej niewidzianych zbiorach danych oraz w wodach o wysokiej mętności, co wskazuje na zdolność adaptacji do zróżnicowanych warunków terenowych.
Co to oznacza dla zdrowszych oceanów
Mówiąc prosto, badanie pokazuje, że obecnie możliwe jest zbudowanie kompaktowych systemów widzenia, które nie tylko znajdują śmieci pod wodą, ale także dokładnie je obrysowują i klasyfikują w czasie rzeczywistym na pokładzie małych robotów podwodnych. Łącząc oczyszczanie obrazu z uwzględnieniem praw fizyki z wydajnym pipeline’em wykrywania i segmentacji, proponowane podejście znajduje praktyczny kompromis między szybkością a precyzją. Takie systemy mogłyby zasilać przyszłe floty autonomicznych pojazdów mapujących gorące punkty zanieczyszczeń, śledzących ruch odpadów z prądami i wspierających ukierunkowane akcje sprzątania. Choć potrzebne są dalsze prace, aby poradzić sobie z rzadkimi typami odpadów i szerszym zakresem warunków wodnych, badania te stanowią konkretny krok w kierunku inteligentniejszego, bardziej zrównoważonego zarządzania odpadami morskimi.
Cytowanie: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
Słowa kluczowe: wykrywanie zanieczyszczeń pod wodą, zanieczyszczenie mórz, widzenie komputerowe, autonomiczne pojazdy podwodne, odpady plastikowe