Clear Sky Science · sv
Adaptiv lättviktsmodell Mask R-CNN för instanssegmentering och klassificering av undervattensskräp för hållbar hantering av havsavfall
Varför det är viktigt att städa upp skräp under vattnet
Långt under vågorna samlas plastflaskor, påsar, fisknät och annat skräp på havsbotten och driver genom kustnära vatten. Detta dolda skräp skadar havslivet och gör det svårare att övervaka oceanernas hälsa. Dykare, undervattensrobotar och fjärrstyrda kameror kan hjälpa till, men de måste först kunna se och känna igen skräp tydligt i grumligt, färgskiftande vatten. Denna studie presenterar ett nytt datorseendesystem som gör det möjligt för undervattensrobotar att upptäcka, avgränsa och klassificera skräp i realtid, även vid dålig sikt, och erbjuder ett kraftfullt verktyg för framtida insatser för havsstädning.
Problem med att se klart under ytan
Undervattensscener är mycket svårare att tolka än bilder tagna i luft. När ljus färdas genom vatten försvinner röda toner först, följt av andra färger, vilket lämnar bilder dominerade av blågröna nyanser. Suspenderade partiklar sprider ljuset, sänker kontrasten och lägger en disig slöja över bilden. För en robot eller kamera som försöker hitta en blek plastpåse mot en ljus, skiftande botten är detta en allvarlig utmaning. Traditionella bildkorrigeringar som enkla kontrastjusteringar kan hjälpa något, men de misslyckas ofta när förhållandena förändras med djup, grumlighet eller ljus. Många befintliga djupinlärningsdetektorer har antingen svårt att avgränsa skräp noggrant eller är för tungdrivna för att köras på de små datorer som normalt finns ombord på autonoma undervattensfarkoster.
En snabbare, lättare metod för att hitta undervattensskräp
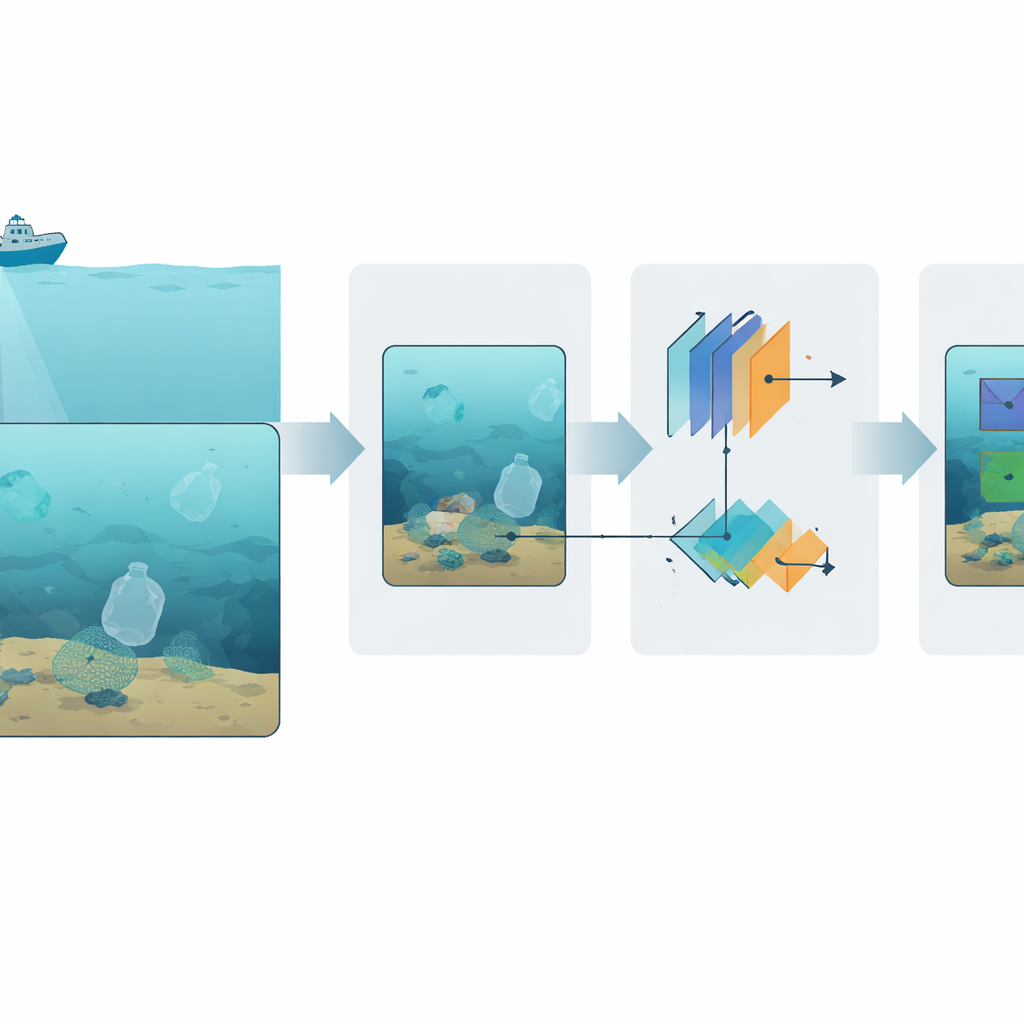
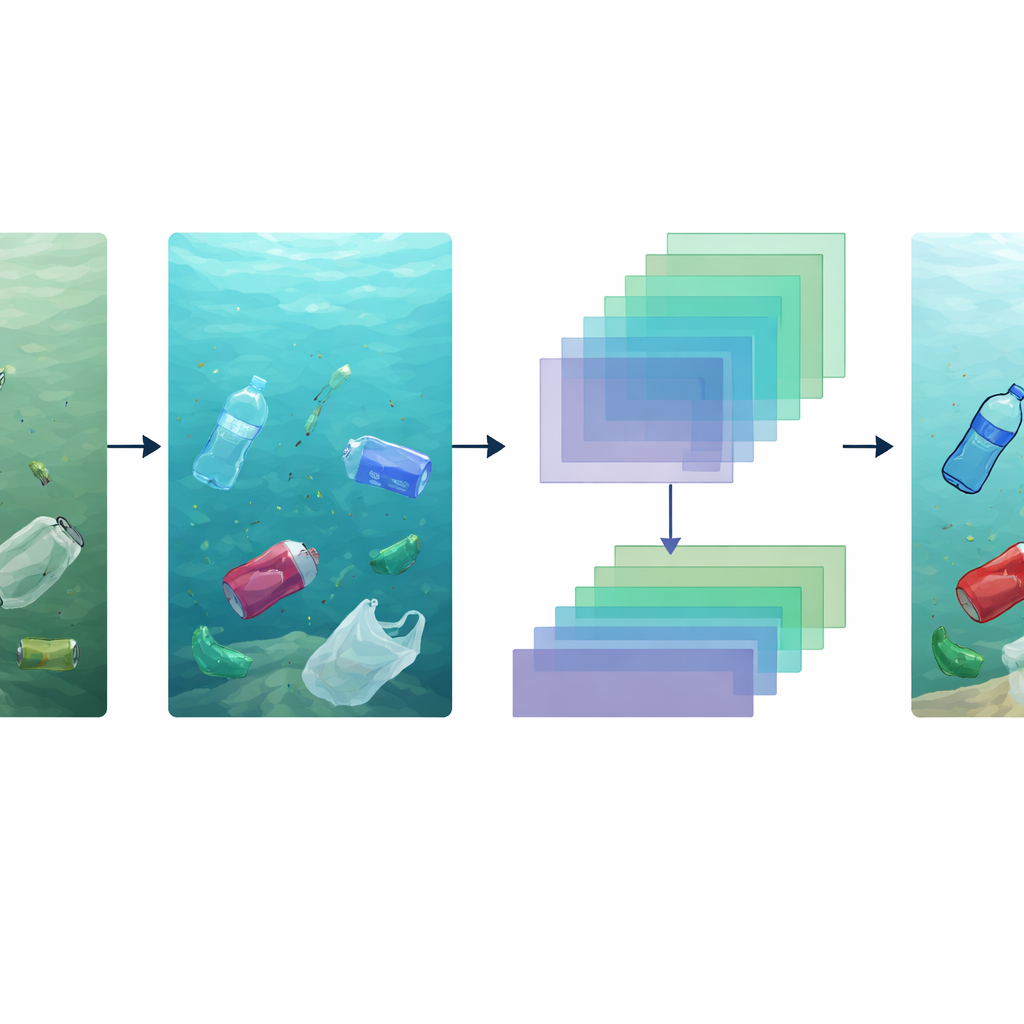
Författarna föreslår ett "adaptivt lättvikts Mask R-CNN"-system anpassat för denna hårda miljö. På en övergripande nivå följer systemet en enkel kedja: det förbehandlar först den råa undervattensbilden, extraherar sedan viktiga visuella mönster, föreslår sannolika skräpregioner och ritar slutligen precisa silhuetter runt varje skräpföremål samtidigt som det tilldelar en kategori som flaska, påse eller nät. För att hålla systemet tillräckligt snabbt för realtidsbruk förlitar det sig på MobileNetV3 — ett kompakt men kapabelt neuralt nätverk — som huvudfunktionsextraktör. Denna ryggrad kombineras med en uppgraderad modul för regionförslag som är finjusterad för att hitta små, oregelbundna och delvis dolda skräpbitar, en vanlig situation på stökiga havsbottnar.
Göra grumliga bilder mer naturliga
En central komponent är en dedikerad förbättringsmodul som arbetar före detektionssteget. Denna modul tränas för att vända de fysiska effekterna av vatten på ljus, styrd av en modell för hur olika färger falnar med djupet. Ett konvolutionellt neuralt nätverk uppskattar hur långt ljuset har färdats genom vattnet och hur starkt varje färgkanal har absorberats, och återskapar sedan en klarare, mer naturligt utseende version av scenen. Ytterligare steg justerar ljusstyrka, sträcker kontrast och dämpar försiktigt brus, vilket ger bilder med skarpare kanter och mer realistiska färger. Dessa korrigeringar gör det mycket lättare för senare stadier i systemet att urskilja flaskor, påsar och andra föremål mot röriga, lågkontrastbakgrunder.
Hur systemet lär sig att avgränsa skräp
När bilden har förbättrats omvandlar MobileNetV3 den till staplar av feature-maps som sammanfattar former, texturer och färgmönster på flera skalor. En förbättrad förslagsmodul fusar information från flera av dessa skalor så att den kan hantera både stora nät och pyttesmå plastbitar. Istället för att förlita sig på handvalda mallstorlekar lär den sig ankraformer från träningsdata och betonar de som bäst matchar scenen, vilket minskar falska larm. För varje lovande region förfinar en slutlig gren gränserna med en precis provtagningsmetod som bevarar fina detaljer längs kanter. Resultatet är en mask som följer varje objekts kontur, inte bara en grov begränsningsruta, vilket är avgörande vid uppskattning av hur mycket skräp som finns eller vid planering av robotgrepp och uppsamling.
Bevisa prestanda i realistiska förhållanden
Teamet tränade och testade systemet på flera bilddatamängder med undervattensskräp, inklusive utmanande scener med kraftig dis, svagt ljus och färgförvrängning. För att efterlikna verkliga dyk använde de också dataaugmenteringstekniker som kontrastförändringar, speglingar och oskärpa. Den förbättrade modellen uppnådde ett medelvärde av genomsnittlig precision på omkring 88 % och en överlappningspoäng över 83 %, och överträffade både en standard Mask R-CNN och snabbare one-shot-detektorer som varianter av YOLO, samtidigt som den ändå kördes i ungefär 30 bilder per sekund. Den presterade väl över olika plasttyper — från flaskor och påsar till mikroplaster — och höll god noggrannhet även på tidigare icke sedda dataset och i vatten med hög grumlighet, vilket indikerar att den kan anpassa sig till varierande fältförhållanden.
Vad detta betyder för friskare hav
Enkelt uttryckt visar studien att det nu är möjligt att bygga kompakta visionssystem som inte bara hittar undervattensskräp utan också avgränsar och klassificerar det noggrant i realtid ombord små undervattensrobotar. Genom att kombinera fysikmedveten bildrensning med en effektiv detektions- och segmenteringspipeline uppnår den föreslagna metoden en praktisk balans mellan hastighet och precision. Sådana system skulle kunna driva framtida flottor av autonoma farkoster som kartlägger skräpbetesområden, följer hur avfall rör sig med strömmar och bistår i riktade saneringsinsatser. Även om ytterligare arbete krävs för att hantera sällsynta skräptyper och ett bredare spektrum av vattenförhållanden markerar denna forskning ett konkret steg mot smartare, mer hållbar hantering av marint avfall.
Citering: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
Nyckelord: detektion av undervattensskräp, havsförorening, datorseende, autonoma undervattensfarkoster, plastavfall