Clear Sky Science · nl
Adaptief lichtgewicht Mask R-CNN-model voor instance-segmentatie en classificatie van onderwaterafval gericht op duurzaam beheer van marien afval
Waarom het opruimen van onderwaterafval ertoe doet
Ver onder de golven hopen plastic flessen, zakken, vistuigen en ander afval zich op op de zeebodem en drijven ze door kustwateren. Dit verborgen afval schaadt het zeeleven en bemoeilijkt het monitoren van de gezondheid van de oceanen. Duikers, onderwaterrobots en afstandscamera’s kunnen helpen, maar ze moeten eerst vuil duidelijk kunnen zien en herkennen in troebel, gekleurd water. Deze studie presenteert een nieuw computer-visionsysteem waarmee onderwaterrobots in realtime afval kunnen opsporen, omlijnen en classificeren, zelfs bij slechte zichtbaarheid, wat een krachtig hulpmiddel biedt voor toekomstige opruimacties op zee.
Problemen om onder water goed te zien
Onderwaterscènes zijn veel moeilijker te interpreteren dan foto’s die in de lucht zijn genomen. Naarmate licht door water reist, verdwijnen rode tinten het eerst, gevolgd door andere kleuren, waardoor beelden gedomineerd worden door blauwgroene tonen. Gesuspendeerde deeltjes verstrooien licht, verlagen het contrast en leggen een wazig sluier over het beeld. Voor een robot of camera die bijvoorbeeld een bleek plastic zakje wil vinden tegen een helder, bewegend zeebodem is dat een serieuze uitdaging. Traditionele beeldcorrecties zoals simpele contrastaanpassingen helpen soms een beetje, maar ze falen vaak als de omstandigheden veranderen met diepte, troebelheid of verlichting. Veel bestaande deep-learningdetectoren slagen er ofwel niet in afval nauwkeurig te omlijnen, of zijn te zwaar om te draaien op de kleine computers die autonome onderwatervoertuigen meestal aan boord hebben.
Een snellere, lichtere manier om onderwaterafval te detecteren
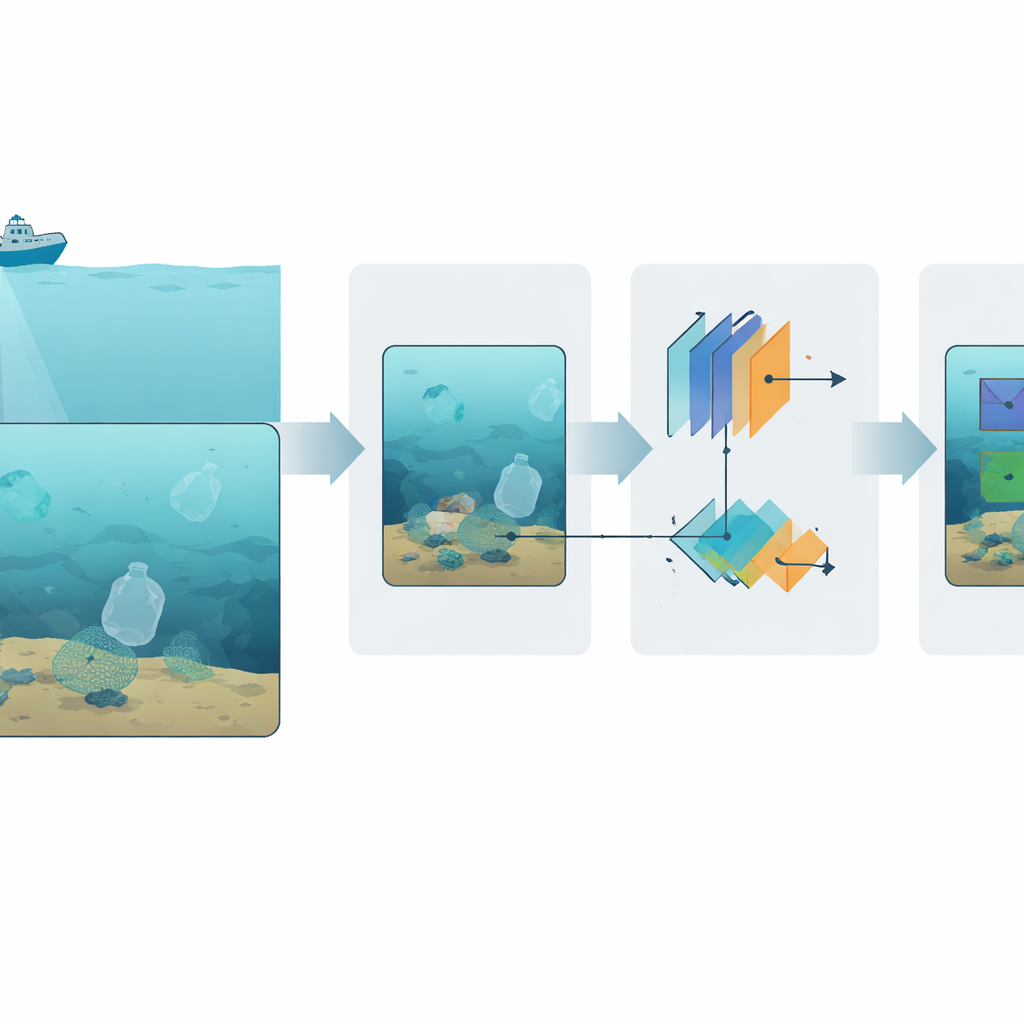
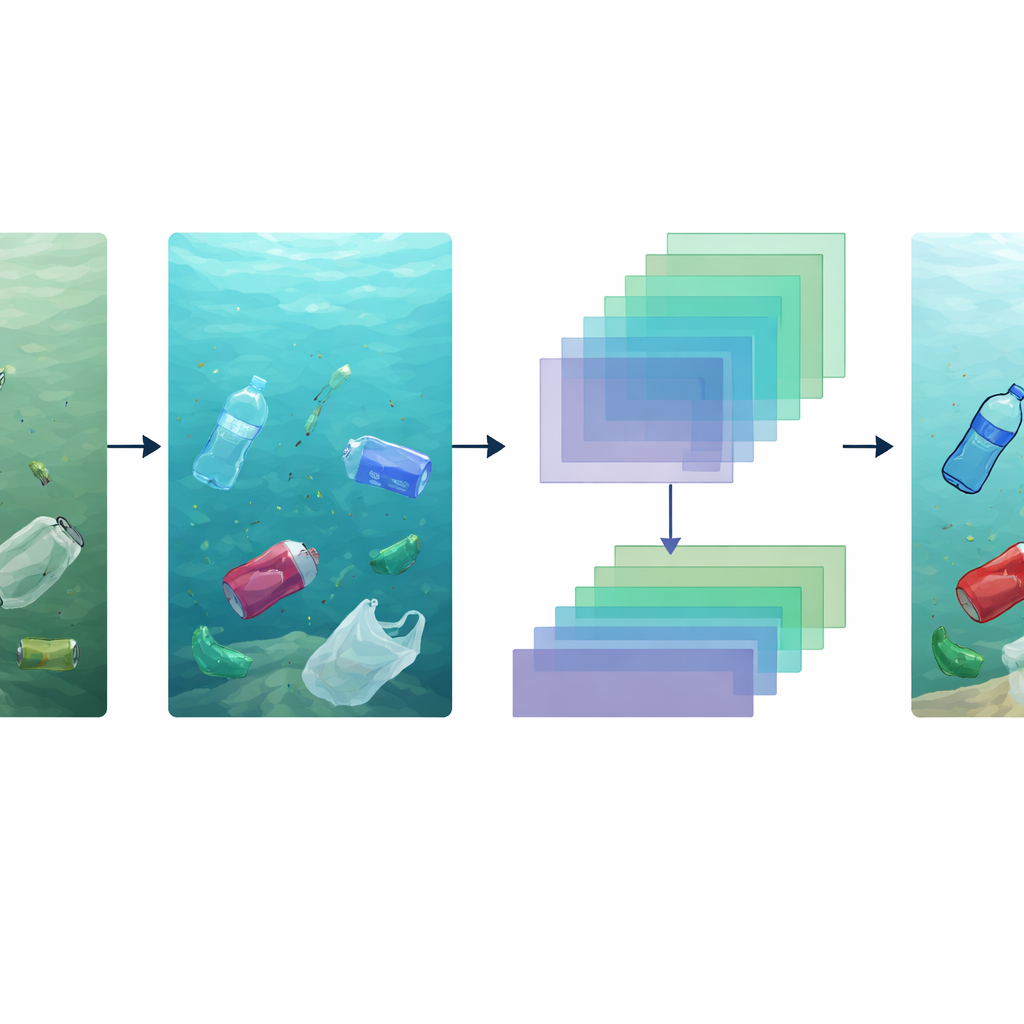
De auteurs stellen een “adaptief lichtgewicht Mask R-CNN”-systeem voor, speciaal afgestemd op deze zware omgeving. Op hoofdlijnen volgt het systeem een eenvoudige keten: eerst wordt de ruwe onderwaterfoto opgeschoond, vervolgens worden belangrijke visuele patronen geëxtraheerd, daarna worden waarschijnlijke afvalregio’s voorgesteld en tenslotte worden precieze silhouetten rond elk stuk afval getekend terwijl het wordt ingedeeld in categorieën zoals fles, zak of net. Om het systeem snel genoeg te houden voor realtimegebruik, maakt het gebruik van MobileNetV3—een compact maar capabel neuraal netwerk—als hoofdfeature-extractor. Deze backbone wordt gecombineerd met een verbeterde region-proposal-module die is afgestemd op het vinden van kleine, onregelmatige en gedeeltelijk verborgen stukken afval, een veelvoorkomende situatie op rommelige zeebodems.
Troebele beelden er natuurlijker uit laten zien
Een centraal onderdeel is een speciaal verbeteringsmodule die vóór detectie opereert. Deze module is getraind om de fysieke effecten van water op licht om te keren, gestuurd door een model van hoe verschillende kleuren vervagen met de diepte. Een convolutioneel neuraal netwerk schat hoe ver licht door het water heeft gereisd en hoe sterk elk kleurkanaal is geabsorbeerd, en bouwt vervolgens een helderdere, natuurlijker ogende versie van de scène op. Extra stappen passen helderheid aan, rekken het contrast op en verminderen voorzichtig ruis, wat beelden oplevert met scherpere randen en realistischere kleuren. Deze correcties maken het veel makkelijker voor latere systeemstadia om flessen, zakken en andere objecten uit drukke, lage-contrastachtergronden te halen.
Hoe het systeem leert afval te omlijnen
Zodra het beeld is verbeterd, zet MobileNetV3 het om in stapels featuremaps die vormen, texturen en kleurpatronen op meerdere schalen samenvatten. Een verbeterde proposal-module fuseert informatie van meerdere van deze schalen zodat zowel grote netten als piepkleine plasticdeeltjes kunnen worden verwerkt. In plaats van te vertrouwen op handgekozen sjabloongroottes, leert het anker-vormen uit de trainingsdata en benadrukt het diegene die het beste bij de scène passen, wat het aantal valse alarmen vermindert. Voor elke veelbelovende regio verfijnt een laatste tak de grenzen met een precieze bemonsteringsmethode die fijne details langs randen behoudt. Het resultaat is een masker dat de omtrek van elk object volgt, niet slechts een ruwe begrenzingsbox, wat cruciaal is bij het schatten hoeveel afval aanwezig is of bij het plannen van robotgrepen en collectie.
Prestaties aantonen onder realistische omstandigheden
Het team trainde en testte het systeem op meerdere datasets met onderwaterafvalbeelden, inclusief uitdagende scènes met sterke nevel, weinig licht en kleurvervorming. Om echte duiken na te bootsen gebruikten ze ook data-augmentatietrucs zoals contrastveranderingen, spiegelen en vervagingen. Het verbeterde model behaalde een mean average precision van ongeveer 88% en een overlapscore boven 83%, waarmee het zowel een standaard Mask R-CNN als snellere one-shot-detectoren zoals YOLO-varianten overtrof, terwijl het nog steeds rond de 30 frames per seconde draaide. Het presteerde goed voor verschillende soorten plastics—van flessen en zakken tot microplastics—en behield goede nauwkeurigheid zelfs op eerder ongeziene datasets en in water met hoge troebelheid, wat aangeeft dat het zich kan aanpassen aan uiteenlopende veldomstandigheden.
Wat dit betekent voor gezondere oceanen
Simpel gezegd toont de studie aan dat het nu mogelijk is compacte visionsystemen te bouwen die niet alleen onderwaterafval vinden, maar het ook nauwkeurig omlijnen en classificeren in realtime aan boord van kleine onderwaterrobots. Door fysica-bewuste beeldopruiming te combineren met een efficiënte detectie- en segmentatiepijplijn, slaat de voorgestelde aanpak een praktische balans tussen snelheid en precisie. Dergelijke systemen zouden toekomstige vloten van autonome voertuigen kunnen aandrijven die hotspots van vervuiling in kaart brengen, volgen hoe afval met stromingen meebeweegt en helpen bij gerichte opruimacties. Hoewel verder werk nodig is om om te gaan met zeldzame afvaltypes en een breder scala aan watercondities, markeert dit onderzoek een concrete stap naar slimmer en duurzamer beheer van marien afval.
Bronvermelding: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
Trefwoorden: detectie van onderwaterafval, vervuiling van zeeën, computer vision, autonome onderwatervoertuigen, plastic afval