Clear Sky Science · it
Modello Mask R-CNN adattivo e leggero per segmentazione e classificazione di rifiuti subacquei per una gestione sostenibile dei rifiuti marini
Perché è importante ripulire i rifiuti sottomarini
Ben sotto la superficie, bottiglie di plastica, sacchetti, reti da pesca e altri detriti si accumulano sul fondale e fluttuano nelle acque costiere. Questa spazzatura nascosta danneggia la vita marina e rende più difficile monitorare la salute degli oceani. Subacquei, robot sottomarini e telecamere remote possono aiutare, ma prima devono essere in grado di vedere e riconoscere i rifiuti chiaramente in acqua torbida o tinta. Questo studio presenta un nuovo sistema di visione artificiale che consente ai robot subacquei di individuare, delineare e classificare i detriti in tempo reale, anche quando la visibilità è scarsa, offrendo uno strumento potente per futuri sforzi di pulizia marina.
I problemi della visione sotto il mare
Le scene subacquee sono molto più difficili da interpretare rispetto a immagini scattate in aria. Man mano che la luce attraversa l’acqua, i toni rossi scompaiono per primi, seguiti da altri colori, lasciando immagini dominate da sfumature blu-verdi. Le particelle sospese disperdono la luce, riducendo il contrasto e aggiungendo una velatura. Per un robot o una telecamera che cerca una busta di plastica chiara contro un fondale luminoso e in movimento, questo è una sfida seria. Correzioni tradizionali come semplici aggiustamenti di contrasto possono aiutare un po’, ma spesso falliscono quando le condizioni variano con la profondità, la torbidità o l’illuminazione. Molti rilevatori deep-learning esistenti hanno difficoltà a delineare i detriti con precisione oppure sono troppo pesanti per girare sui piccoli computer tipicamente montati dai veicoli subacquei autonomi.
Un modo più veloce e leggero per individuare i rifiuti subacquei
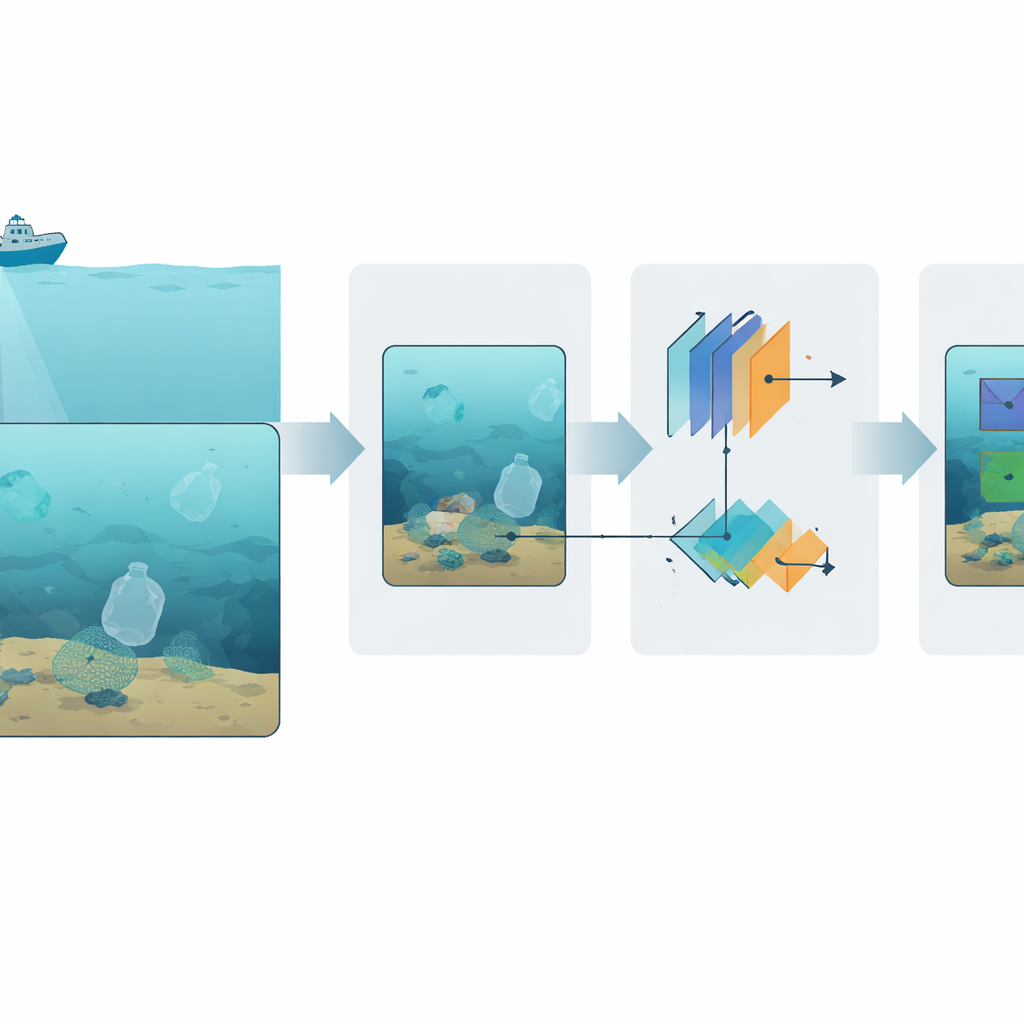
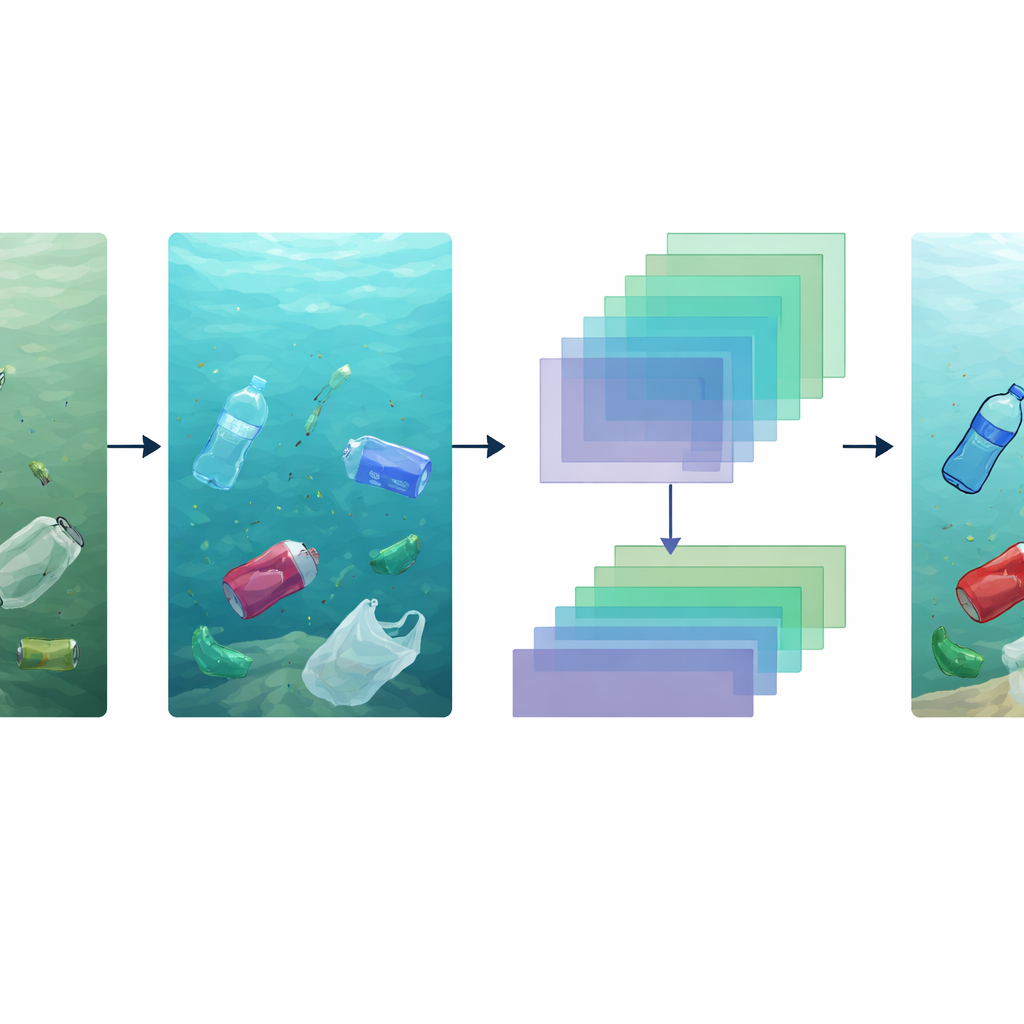
Gli autori propongono un sistema “Mask R-CNN adattivo e leggero” pensato per questo ambiente ostile. A grandi linee, il sistema segue una catena semplice: prima pulisce l’immagine subacquea grezza, poi estrae pattern visivi chiave, quindi propone regioni probabili di detriti e infine traccia silhouette precise intorno a ciascun pezzo di spazzatura assegnandone la categoria, come bottiglia, sacchetto o rete. Per mantenere il sistema abbastanza veloce per l’uso in tempo reale, si basa su MobileNetV3—una rete neurale compatta ma capace—come estrattore principale di caratteristiche. Questa backbone è abbinata a un modulo di proposta di regioni potenziato, tarato per trovare detriti piccoli, irregolari e parzialmente nascosti, situazione comune sui fondali ingombri.
Far apparire le immagini torbide più naturali
Un ingrediente centrale è un modulo di miglioramento dedicato che opera prima della rilevazione. Questo modulo è addestrato a invertire gli effetti fisici dell’acqua sulla luce, guidato da un modello di come i diversi colori svaniscono con la profondità. Una rete neurale convoluzionale stima quanto la luce ha viaggiato attraverso l’acqua e quanto ciascun canale colore è stato assorbito, quindi ricostruisce una versione più chiara e dall’aspetto naturale della scena. Passaggi aggiuntivi regolano la luminosità, allungano il contrasto e riducono delicatamente il rumore, generando immagini con bordi più netti e colori più realistici. Queste correzioni facilitano molto le fasi successive del sistema nel distinguere bottiglie, sacchetti e altri oggetti su sfondi affollati e a basso contrasto.
Come il sistema impara a delineare i detriti
Una volta migliorata l’immagine, MobileNetV3 la converte in pile di mappe di caratteristiche che riassumono forme, trame e pattern di colore a più scale. Un modulo di proposta migliorato fonde informazioni da diverse di queste scale in modo da gestire sia reti di grandi dimensioni sia minuscoli frammenti di plastica. Invece di fare affidamento su taglie di template scelte a mano, apprende forme di anchor dai dati di addestramento e enfatizza quelle che meglio corrispondono alla scena, riducendo i falsi allarmi. Per ogni regione promettente, un ramo finale affina i confini usando un metodo di campionamento preciso che preserva i dettagli fini lungo i bordi. Il risultato è una maschera che traccia il contorno di ciascun oggetto, non solo una semplice scatola di delimitazione, fondamentale quando si stima la quantità di rifiuti presente o si pianifica la presa e la raccolta robotica.
Verificare le prestazioni in condizioni realistiche
Il team ha addestrato e testato il sistema su diversi set di immagini di detriti subacquei, incluse scene impegnative con forte foschia, scarsa illuminazione e distorsione dei colori. Per simulare immersioni reali hanno anche usato trucchi di data augmentation come variazioni di contrasto, ribaltamenti e sfocature. Il modello migliorato ha raggiunto una precisione media (mAP) di circa l’88% e un punteggio di sovrapposizione superiore all’83%, superando sia un Mask R-CNN standard sia rilevatori one-shot più veloci come varianti di YOLO, mantenendosi però in grado di operare a circa 30 fotogrammi al secondo. Ha funzionato bene su diversi tipi di plastica—da bottiglie e sacchetti a microplastiche—e ha mantenuto buona accuratezza anche su dataset precedentemente non visti e in acqua ad alta torbidità, indicando che può adattarsi a condizioni di campo varie.
Cosa significa per oceani più sani
In termini semplici, lo studio dimostra che è ora possibile costruire sistemi di visione compatti che non solo trovano i rifiuti subacquei ma li delineano e li classificano accuratamente in tempo reale a bordo di piccoli robot subacquei. Combinando la pulizia dell’immagine consapevole della fisica con una pipeline di rilevamento e segmentazione efficiente, l’approccio proposto trova un equilibrio pratico tra velocità e precisione. Tali sistemi potrebbero alimentare future flotte di veicoli autonomi che mappano gli hotspot di rifiuti, tracciano come i rifiuti si muovono con le correnti e assistono in operazioni di pulizia mirate. Pur richiedendo ulteriori lavori per gestire tipi di detriti rari e una gamma più ampia di condizioni dell’acqua, questa ricerca rappresenta un passo concreto verso una gestione dei rifiuti marini più intelligente e sostenibile.
Citazione: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. Adaptive lightweight mask R-CNN model for underwater debris instance segmentation and classification towards sustainable marine waste management. Sci Rep 16, 14057 (2026). https://doi.org/10.1038/s41598-026-44542-0
Parole chiave: rilevamento rifiuti subacquei, inquinamento marino, visione artificiale, veicoli subacquei autonomi, rifiuti plastici