Clear Sky Science · tr
Sayısal İkizler Kullanarak Rüzgâr Türbini Üretiminde Uyarlanabilir İnsan–Robot İşbirliği
Daha Akıllı Yardımla Daha Büyük Türbinler İnşa Etmek
Rüzgâr türbinleri devasa boyutlara ulaşıyor; bazı açık deniz makineleri artık gökdelenlerle yarışacak kadar yüksek. Bu devler ucuz ve temiz elektrik sağlayabiliyor, ancak onları bir araya getirmek hâlâ zorlu, el işçiliği gerektiren bir süreç. Bu makale, fabrika işçilerinin yeni nesil robotlar ve onların sanal “ikizleri” ile nasıl işbirliği yaparak önemli türbin parçalarını daha hızlı, daha güvenli ve daha az maliyetli hatayla monte edebileceğini inceliyor.
Neden Dev Türbinler Yeni Bir Yardım Türü Gerektirir
Modern rüzgâr türbinleri, daha büyük rotorların rüzgârdan daha fazla enerji elde etmesi nedeniyle boyut ve güç olarak büyüdü. Sonuç, daha ucuz elektrik ve her türbinin ömrü boyunca daha düşük karbon ayak izi oluyor. Yine de dev kulelerin, kanatların ve üstündeki nacelle’lerin üretimi büyük ölçüde el işçiliği gerektiriyor. İşçiler uzun, ağır bileşenleri kıvrımlı yüzeyler etrafında kaldırıp ölçmek ve monte etmek zorunda kalıyor; bu çoğu zaman dar veya yüksek çalışma alanlarında oluyor. Sık tasarım değişiklikleri geleneksel, sabit endüstriyel robotları zayıf bir seçenek haline getiriyor; çünkü bu sistemlerin yeniden programlanması pahalı ve üreticileri katı düzenlere bağlı kılıyor. Aynı zamanda karmaşık türbin parçaları üreten birçok ülkede işgücü yaşlanıyor ve nitelikli işçi sıkıntısı var; bu da fabrika katında insan işçileri desteklemenin yeni yollarını bulma baskısını artırıyor.
İnsanların Yanında Çalışan Robotlar, Onların Yerine Olanlar Değil
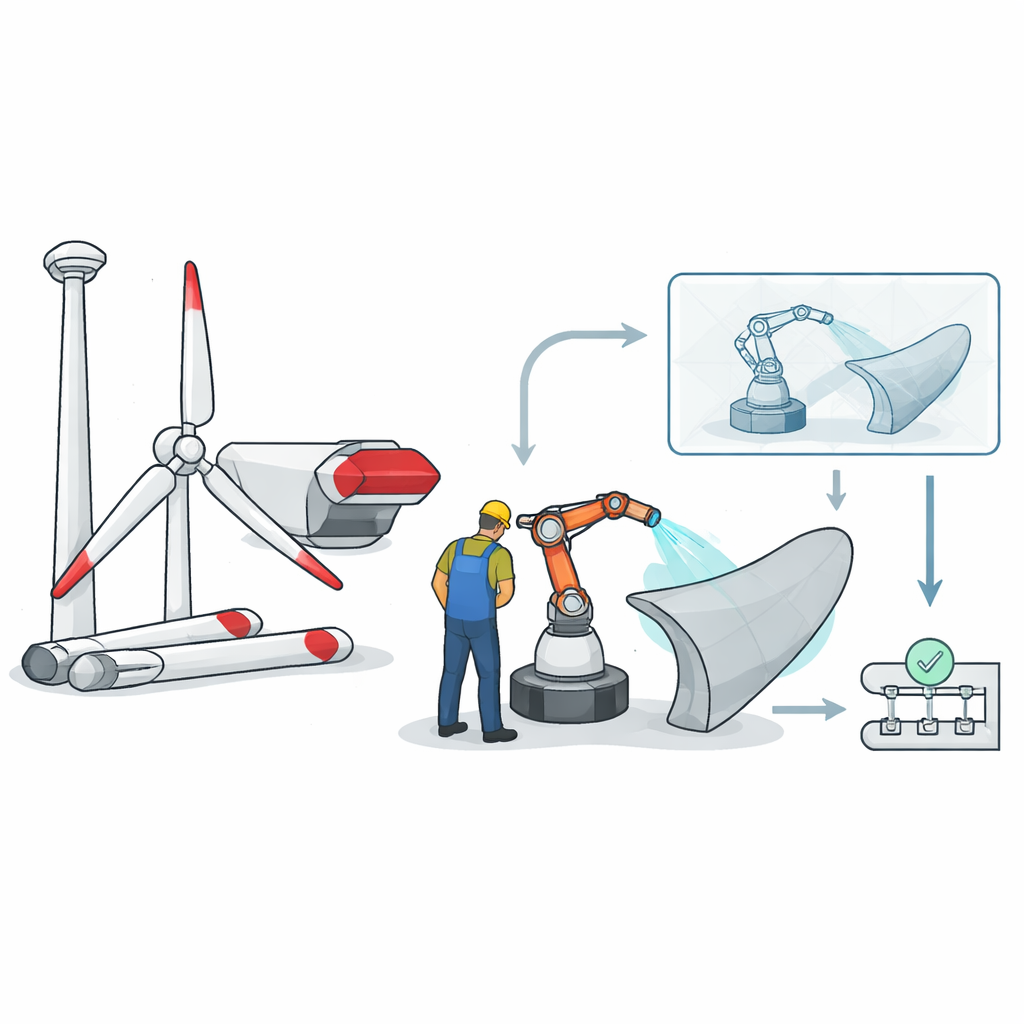
Yazarlar, güvenlik çitlerinin arkasında değil, insanlarla aynı alanı paylaşmak üzere tasarlanmış işbirlikçi robotlar veya cobot’lar adlı bir makine sınıfına odaklanıyor. Dar bir görev için üretilmiş geleneksel robotların aksine, önerilen mobil robot yardımcısı bir tekerlekli tabanla birleşmiş küçük bir robot kolu içeriyor, böylece istasyonlar arasında hareket edebiliyor. Yardımcı, tekrarlayan ve hassas işleri üstlenirken insanlar ise muayene ve problem çözme gibi yargı gerektiren görevleri yapacak şekilde tasarlandı. Sistemi tek amaçlı değil uyarlanabilir kılmak için ekip, robotun bileğine takılabilen değiştirilebilir araçlar gibi modüler donanım ve yeni ürünler ve görevler için yeniden yapılandırılabilecek esnek yazılım etrafında tasarım yaptı. Temel fikir, insanların kontrolün merkezinde kalması; robotun ise en çok gerektiği yere atanabilecek yetenekli bir yardımcı gibi davranmasıdır.
Robotu Tasarlamak ve Yönlendirmek İçin Bir Sanal İkiz Kullanmak
Bu çalışmadaki önemli yeniliklerden biri, robotun, aletlerinin ve monte edeceği türbin parçalarının yüksek doğruluklu sanal kopyası olan sayısal ikizin kullanılmasıdır. Mühendisler, bilgisayar destekli tasarım dosyalarından türbin tasarımlarını simülasyon yazılımına aktarır ve robotu bu parçalardaki belirli noktalara ulaşacak şekilde programlar. Bu sanal dünyada kolun her konuma erişip erişemeyeceğini test edebilir, çarpışmaları önlemek için yollarını ayarlayabilir ve fiziksel ekipman inşa etmeden veya yeniden yapılandırmadan önce görevlerin ne kadar süreceğini tahmin edebilirler. Sayısal ikiz, işletim sırasında gerçek robotla bağlantılı kalır; bu sayede pozisyonlar ve hareketler karşılıklı olarak alışveriş yapılabilir. Bu bağlantı, sistemi ince ayarlamayı, bir lazerin işaret ettiği yerdeki küçük sapmalar gibi ofsetleri düzeltmeyi ve türbin tasarımları değiştiğinde programları hızlıca güncellemeyi kolaylaştırır.
Zorlu Bir Montaj İşinde Gerçek Bir Fabrika Denemesi
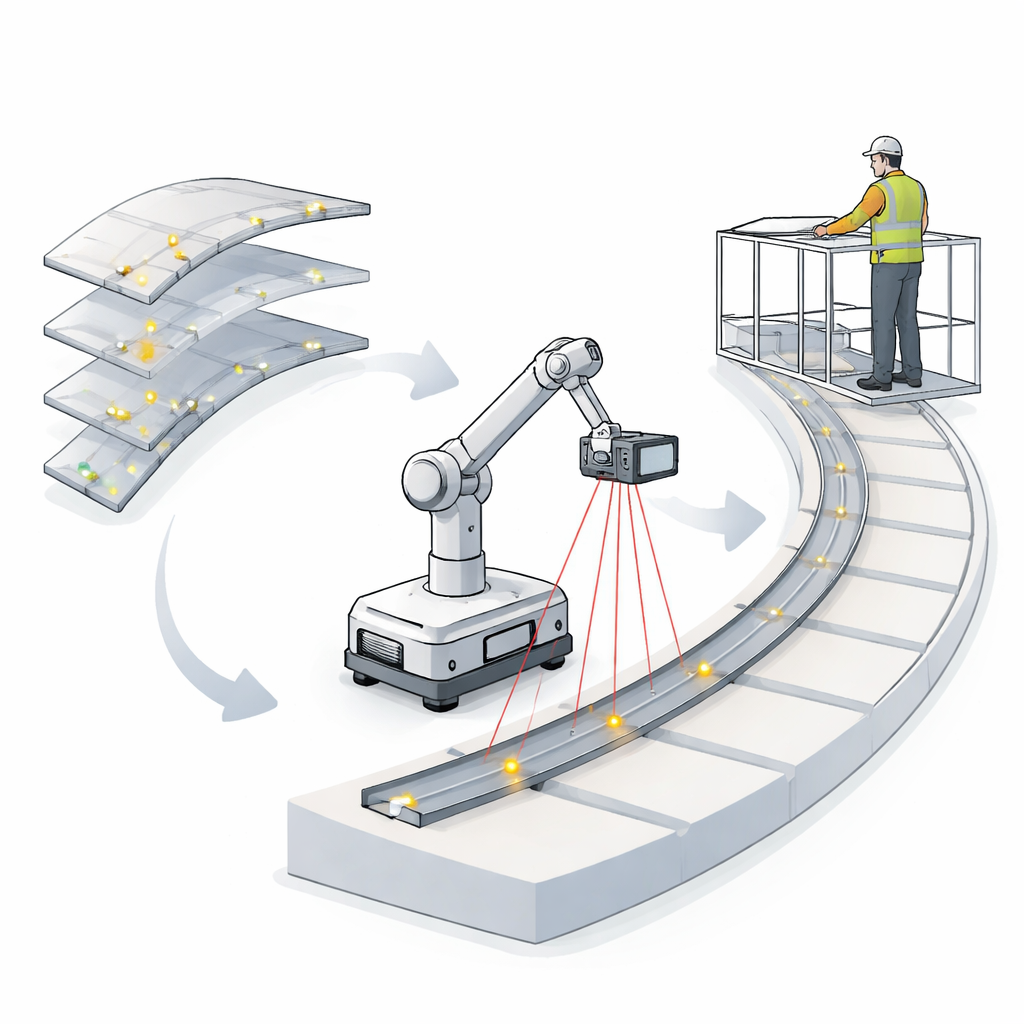
Kavramsal yaklaşımın pratikte nasıl işlediğini göstermek için araştırmacılar önde gelen bir rüzgâr türbini üreticisiyle ortaklık kurdu ve belirli bir darboğazı ele aldı: nacelle içindeki büyük bir çelik çerçeveye onlarca kablo kanalının montajı. İşçiler daha önce kıvrımlı bir yüzey boyunca elle ölçmek zorunda kalıyor, derinlik algısıyla mücadele ediyor ve sıklıkla daha sonra kabloların kısa kalmasına yol açan küçük yerleştirme hataları yapıyorlardı. Mobil robot yardımcısı, birden çok lazer ünitesini tutan özel 3D yazıcı ile basılmış bir aletle donatıldı. Sayısal ikiz rehberliğinde robot, kanalların takılacağı tam noktalar ve açılarda çelik çerçeve üzerine ince, parlak çizgiler projekte ediyor. Bir çalışan, platformda veya çerçevenin içinde durarak her kanalı tekrar tekrar ölçmek yerine lazer işaretleriyle hizalıyor. Denemeler, sistemin yerleştirme hatalarını birkaç milimetre mertebesinde tuttuğunu, denemelerde kablo uzunluğu problemlerini ortadan kaldırdığını ve montaj süresini çerçeve başına yaklaşık kırk dakikadan yaklaşık yirmi beş dakikaya düşürdüğünü gösterdi—yaklaşık üçte birlik bir azalma.
Kontrolü İşçinin Bileğinde Tutmak
Robot insanlar yakınında çalıştığı için, işçilerin onunla nasıl etkileşime girdiği çok önemli. Ekip, elde taşınan kumandalar ve akıllı telefonlar da dahil olmak üzere birkaç kablosuz kontrol seçeneğini denedi ve atölye zemininde en iyi sonuç verenin bir akıllı saat olduğunu buldu. Basit düğmeleri operatörlerin kontrol paneline yürümek zorunda kalmadan robotu başlatmasına, duraklatmasına veya bir sonraki konuma hareket ettirmesine olanak verdi. Sahnenin arkasında küçük bir akıllı röle bu düğme basışlarını robotun kontrolörüne sinyallere dönüştürdü. Operatörler akıllı saat kontrollerinin doğal ve kullanışlı olduğunu bildirdi ve süreç genel olarak daha verimli görünüyordu çünkü artık ölçüm yapmak veya tekrarlayan görsel kontroller için çalışmayı durdurmak zorunda kalmıyorlardı. Sistem, robot daha sonra kablo kanalları için gerekli olmadığında örneğin otomatik alet değiştirici ile yeniden yapılandırılarak cıvata montajı gibi diğer görevleri yapacak şekilde tasarlandı.
Bu, Temiz Enerji Üretimine Ne Anlatıyor
Çalışma, hareketli cobot’lar ve onların sayısal ikizleri ile insan işçileri eşleştirmenin temiz enerji geleceği için gereken çok büyük makineleri inşa etmeyi kolaylaştırabileceğini sonuçlandırıyor. Amacı insanları ortadan kaldırmak değil; sıkıcı ve hata yapmaya yatkın adımları devralıp basit giyilebilir arayüzlerle insanların kontrolünü elinde tutmak. Tam otonom hareketlilik eklenmesi, görsel tabanlı kalibrasyonun iyileştirilmesi ve sıkı güvenlik kurallarına uyum gibi hâlâ aşılması gereken zorluklar bulunsa da yöntem doğruluğu artırma, işçi zamanını kısaltma ve çalışanlar tarafından kabul görme yeteneğini gösterdi. Türbinler büyümeye devam ederken ve fabrikalar esnek kalmanın yollarını ararken, yazarlar bu tür uyarlanabilir robot yardımcıların yenilenebilir enerji teknolojilerini ölçeklendirmenin kilit parçalarından biri hâline gelebileceğini savunuyor.
Atıf: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Anahtar kelimeler: rüzgâr türbini üretimi, işbirlikçi robotlar, sayısal ikiz, insan robot etkileşimi, esnek otomasyon