Clear Sky Science · ar
التعاون التكيفي بين الإنسان والروبوت في تصنيع توربينات الرياح باستخدام التوائم الرقمية
بناء توربينات أكبر بمساعدة أكثر ذكاءً
تزداد توربينات الرياح ضخامةً، حيث أصبحت بعض الآلات البحرية الآن بطول يكاد ينافس ناطحات السحاب. هذه العمالقة قادرة على توليد كهرباء رخيصة ونظيفة، لكن تجميعها لا يزال عملاً شاقاً يعتمد على اليد العاملة. يستعرض هذا المقال كيف يمكن لعمال المصانع أن يتعاونوا مع أنواع جديدة من الروبوتات وتوائمها الافتراضية لتجميع أجزاء أساسية من التوربينات بشكل أسرع وأكثر أماناً وبأخطاء مكلفة أقل.
لماذا تحتاج التوربينات العملاقة إلى نوع جديد من المساعدة
نمت التوربينات الحديثة في الحجم والقوة لأن الدوارات الأكبر تلتقط طاقة أكثر من الريح. النتيجة هي كهرباء أرخص وبصمة كربونية أصغر على مدى عمر كل توربين. ومع ذلك، لا يزال تصنيع الأبراج والشفرات والنيازِل الكبيرة التي تعلوها يتم إلى حد كبير يدوياً. يجب على العمال رفع وقياس وتجميع مكونات طويلة وثقيلة حول أسطح منحنية، وغالباً في مساحات ضيقة أو على ارتفاعات. التغييرات المتكررة في التصميم تجعل الروبوتات الصناعية التقليدية الثابتة غير مناسبة، لأن تلك الأنظمة مكلفة لإعادة برمجتها وتقيد الشركات بتخطيطات جامدة. في الوقت نفسه، تواجه دول كثيرة تصنع أجزاء توربينات معقدة قوى عاملة متقدمة في السن ونقصاً في العمال المهرة، مما يزيد الضغط لإيجاد طرق جديدة لدعم العمال البشريين في أرضية المصنع.
روبوتات تعمل إلى جانب البشر، لا بدلاً منهم
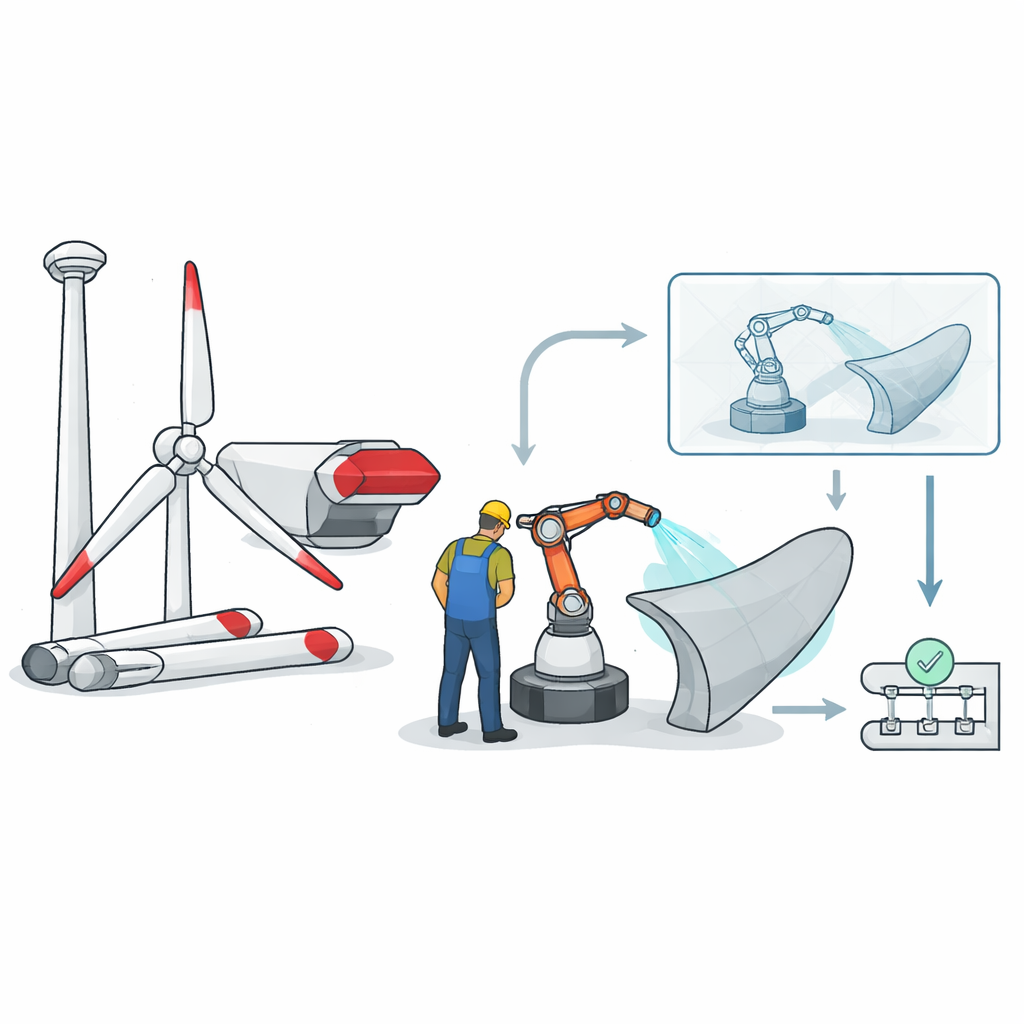
يركز المؤلفون على فئة من الآلات تسمى الروبوتات التعاونية، أو الكوبوتات، المصممة لمشاركة المساحة مع البشر بدلاً من الجلوس خلف حواجز أمان. على عكس الروبوتات التقليدية المصممة لمهمة ضيقة واحدة، يجمع مساعد الروبوت المتنقل المقترح بين ذراع روبوتية صغيرة وقاعدة بعجلات ليتمكن من التنقل بين المحطات. يهدف المساعد إلى التعامل مع الأعمال المتكررة والدقيقة بينما يتولى البشر المهام التي تتطلب حكماً مثل التفتيش وحل المشكلات. لجعل هذا النظام قابلاً للتكيف بدلاً من الغرض الواحد، صممه الفريق حول أجهزة معيارية—أدوات يمكن تبديلها على معصم الروبوت—وبرمجيات مرنة يمكن إعادة تهيئتها لمنتجات ومهام جديدة. فكرة مركزية هي بقاء البشر في موقع القيادة، مع عمل الروبوت كمساعد ماهر يمكن إعادة تخصيصه حيث يكون الأكثر حاجة.
استخدام توأم رقمي لتصميم وتوجيه الروبوت
ابتكار رئيسي في هذا العمل هو استخدام التوأم الرقمي: نسخة افتراضية عالية الدقة من الروبوت، وأدواته، وأجزاء التوربين التي سيقوم بتجميعها. يستورد المهندسون تصاميم التوربين من ملفات التصميم بمساعدة الحاسوب إلى برنامج المحاكاة ويبرمجون الروبوت للوصول إلى نقاط محددة على تلك الأجزاء. في هذا العالم الافتراضي، يمكنهم اختبار ما إذا كانت الذراع قادرة على الوصول إلى كل موقع، وضبط مساراتها لتجنب الاصطدامات، وتقدير الوقت الذي ستستغرقه المهام، كل ذلك قبل بناء أو إعادة تكوين المعدات الفيزيائية. يبقى التوأم الرقمي متصلاً بالروبوت الحقيقي أثناء التشغيل، مما يسمح بتبادل المواضع والحركات ذهاباً وإياباً. يجعل هذا الرابط من السهل ضبط النظام بدقة، وتصحيح الانحرافات مثل الاختلافات الصغيرة في اتجاه شعاع الليزر، وتحديث البرامج بسرعة عندما تتغير تصاميم التوربين.
اختبار حقيقي في مصنع على مهمة تجميع معقدة
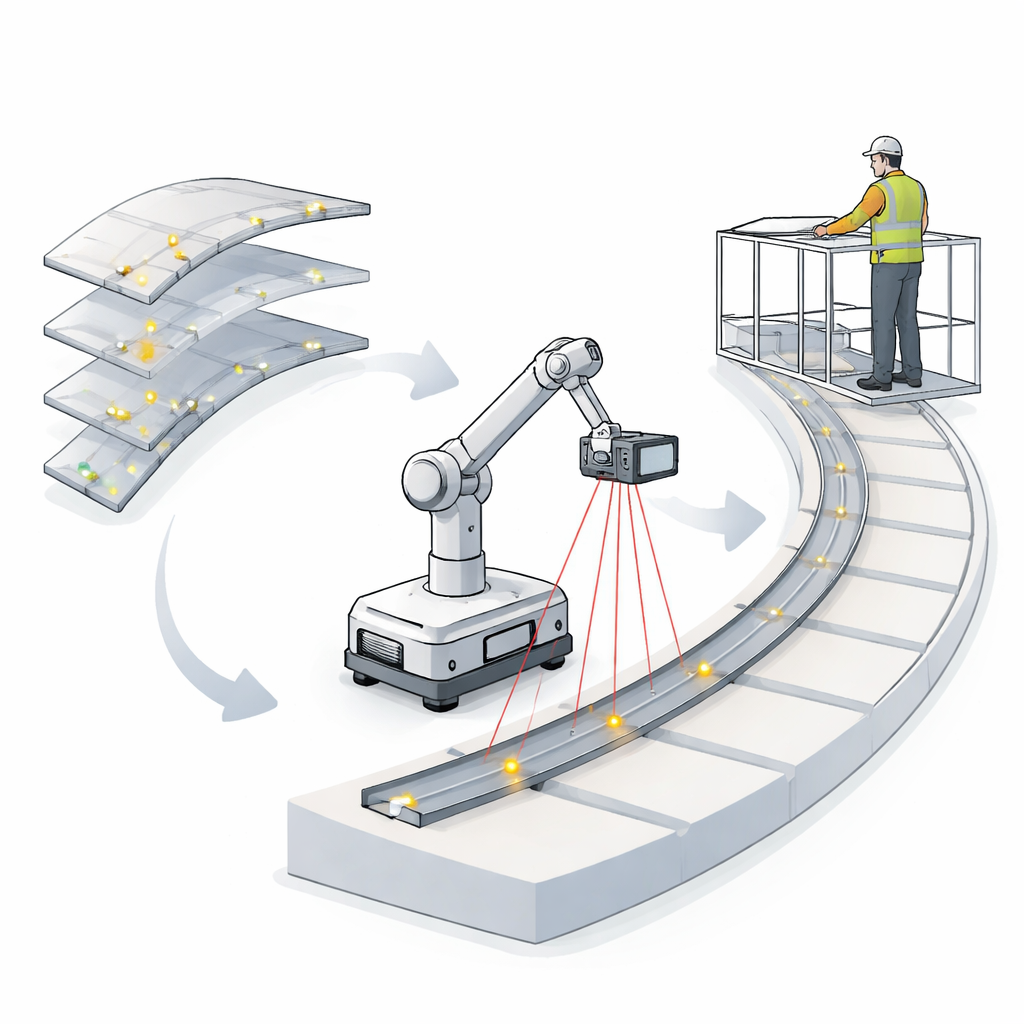
لإظهار كيفية عمل الفكرة عملياً، شارك الباحثون مع مصنع رائد لتوربينات الرياح وتعاملوا مع عنق زجاجة محدد: تركيب عشرات من صواني الكابلات على إطار فولاذي كبير داخل نايسل التوربين. كان العمال سابقاً يقيسون يدوياً على سطح منحني، ويعانون من صعوبة في إدراك العمق وغالباً ما يحدث أخطاء صغيرة في التمركز تؤدي لاحقاً إلى قصر الكابلات. زوِّد مساعد الروبوت المتنقل بأداة مخصصة مطبوعة ثلاثية الأبعاد تحمل وحدات ليزر متعددة. بمساعدة التوأم الرقمي، يسقط الروبوت خطوطاً رفيعة ومشرقة على الإطار الفولاذي في الأماكن والزوايا الدقيقة حيث يجب تثبيت الصواني. يقف العامل على منصة أو داخل الإطار ويقوم بمحاذاة كل صينية مع علامات الليزر بدلاً من القياس المتكرر. أظهرت الاختبارات أن النظام يمكنه إبقاء أخطاء التمركز ضمن بضعة مليمترات تقريباً، وقضى على مشاكل طول الكابل في التجارب، وخفّض زمن التجميع من نحو أربعين دقيقة إلى نحو خمسة وعشرين دقيقة لكل إطار—انخفاض بحوالي ثلث.
الإبقاء على التحكم عند معصم العامل
بما أن الروبوت يعمل بالقرب من الناس، فإن طريقة تفاعل العمال معه كانت حاسمة. جرب الفريق عدة خيارات تحكم لاسلكية، بما في ذلك وحدات تحكم محمولة وهواتف ذكية، ووجد أن الساعة الذكية عملت أفضل على أرضية الورشة. أزرارها البسيطة سمحت للمشغلين ببدء أو إيقاف مؤقت أو نقل الروبوت للموقع التالي دون الحاجة للمشي إلى لوحة تحكم. في الخلفية، يحول مرحل ذكي صغير ضغطات الأزرار هذه إلى إشارات لوحدة تحكم الروبوت. أفاد المشغلون أن ضوابط الساعة الذكية شعروا طبيعية ومريحة، وبدا أن العملية الكلية أكثر كفاءة لأنهم لم يعودوا بحاجة للتوقف عن العمل لأخذ قياسات أو لإجراء فحوص بصرية متكررة. صُمم النظام بحيث يمكن لاحقاً إعادة تهيئة الروبوت—بمثال مبدل أدوات آلي—للقيام بمهام أخرى مثل تجميع الصواميل عندما لا يكون مطلوباً لصواني الكابلات.
ماذا يعني هذا لتصنيع الطاقة النظيفة
تخلص الدراسة إلى أن إقران العمال البشريين بكوبوتات متنقلة وتوائمها الرقمية يمكن أن يسهل بناء الآلات الكبيرة المطلوبة لمستقبل طاقة نظيفة. بدلاً من السعي لاستبدال البشر، يقوم النظام بإزاحة الخطوات المملة والمعرضة للأخطاء، مع إبقاء البشر في موقع التحكم عبر واجهات قابلة للارتداء بسيطة. ومع وجود تحديات لا تزال قائمة—مثل إضافة تنقل مستقل كامل، وتحسين المعايرة القائمة على الرؤية، والالتزام بقواعد السلامة الصارمة—أثبتت المقاربة قدرتها على تحسين الدقة، وتقليل زمن العمل، وقبولها من قبل العمال. ومع استمرار نمو التوربينات وسعي المصانع للحفاظ على المرونة، يجادل المؤلفون بأن مساعدين روبوتيين قابلين للتكيف مثل هذا قد يصبحون جزءاً أساسياً من الحل لتوسيع تكنولوجيات الطاقة المتجددة.
الاستشهاد: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
الكلمات المفتاحية: تصنيع توربينات الرياح, الروبوتات التعاونية, التوأم الرقمي, تفاعل الإنسان والروبوت, الأتمتة المرنة