Clear Sky Science · fr
Collaboration adaptative homme–robot dans la fabrication d’éoliennes à l’aide de jumeaux numériques
Construire des turbines plus grandes avec une aide plus intelligente
Les éoliennes deviennent gigantesques : certaines machines offshore atteignent aujourd’hui des hauteurs comparables à celles des gratte-ciel. Ces géantes peuvent fournir une électricité propre et peu coûteuse, mais leur assemblage reste un travail manuel et exigeant. Cet article examine comment les ouvriers d’usine peuvent s’associer à de nouveaux types de robots et à leurs « jumeaux » virtuels pour monter plus rapidement les composants essentiels des turbines, en toute sécurité et avec moins d’erreurs coûteuses.
Pourquoi les turbines géantes nécessitent une nouvelle forme d’aide
Les éoliennes modernes ont gagné en taille et en puissance parce que des rotors plus grands captent davantage d’énergie du vent. Le résultat : une électricité moins chère et une empreinte carbone réduite sur la durée de vie de chaque turbine. Pourtant, la fabrication des énormes tours, pales et nacelles reste en grande partie manuelle. Les ouvriers doivent soulever, mesurer et assembler des composants longs et lourds sur des surfaces courbes, souvent dans des espaces confinés ou en hauteur. Les changements fréquents de conception rendent les robots industriels fixes traditionnels peu adaptés, car ces systèmes sont coûteux à reprogrammer et enferment les fabricants dans des implantations rigides. Parallèlement, de nombreux pays qui fabriquent des pièces complexes pour turbines font face à un vieillissement de la main-d’œuvre et à des pénuries de personnel qualifié, ce qui accroît la pression pour trouver de nouvelles façons d’aider les travailleurs en atelier.
Des robots qui travaillent aux côtés des personnes, pas à leur place
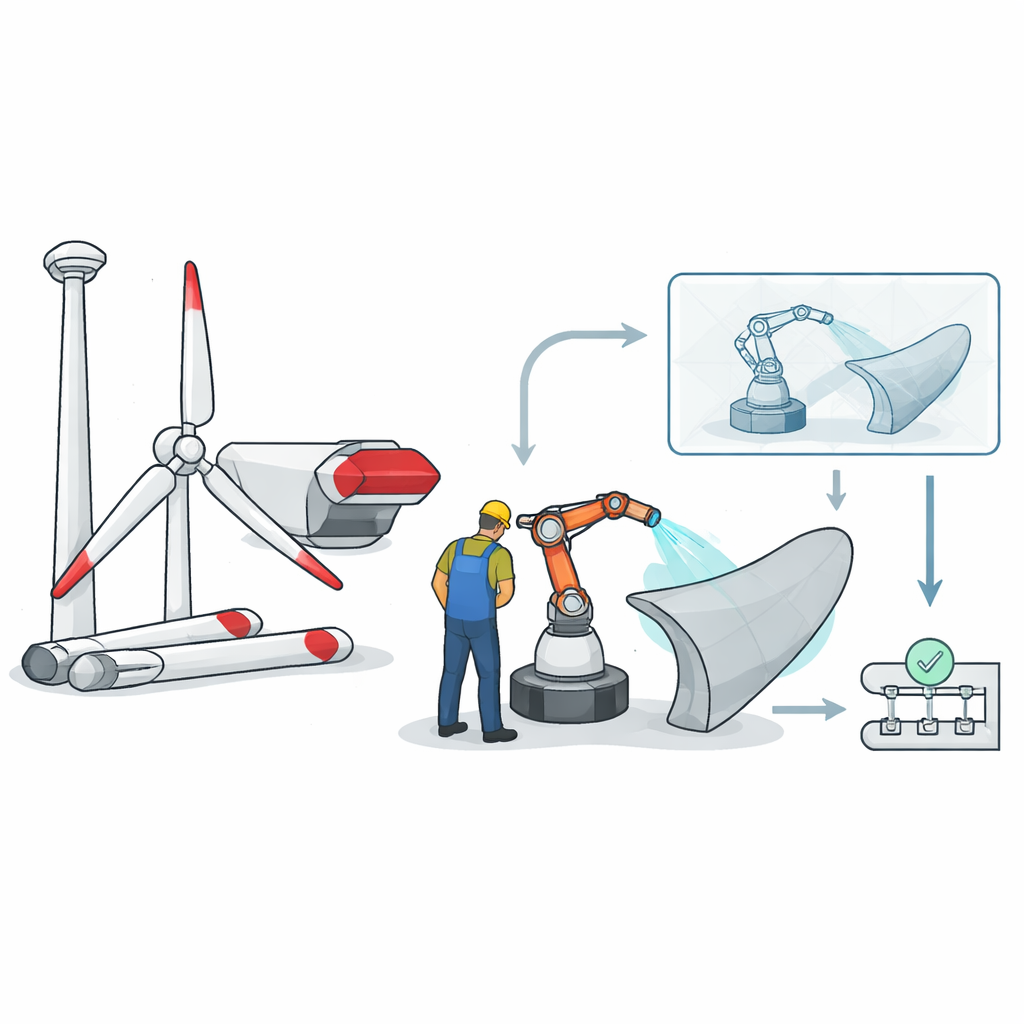
Les auteurs s’intéressent à une classe de machines appelées robots collaboratifs, ou cobots, conçus pour partager l’espace avec des personnes plutôt que d’être enfermés derrière des barrières de sécurité. Contrairement aux robots traditionnels conçus pour une tâche étroite, l’assistant robot mobile proposé combine un petit bras robotique et une base roulante afin de se déplacer entre les postes. L’assistant est destiné à prendre en charge les travaux répétitifs et de précision tandis que les humains effectuent les tâches faisant appel au jugement, comme l’inspection et la résolution de problèmes. Pour rendre ce système adaptable plutôt que mono‑fonctionnel, l’équipe l’a conçu autour d’un matériel modulaire — des outils échangeables au poignet du robot — et d’un logiciel flexible pouvant être reconfiguré pour de nouveaux produits et tâches. L’idée centrale est que les humains restent aux commandes, le robot jouant le rôle d’un aide qualifié pouvant être affecté là où il est le plus nécessaire.
Utiliser un jumeau virtuel pour concevoir et piloter le robot
Une innovation clé de ce travail est l’usage d’un jumeau numérique : une copie virtuelle haute fidélité du robot, de ses outils et des pièces de turbine qu’il doit assembler. Les ingénieurs importent les conceptions de turbine depuis des fichiers de CAO dans un logiciel de simulation et programment le robot pour atteindre des points précis sur ces pièces. Dans ce monde virtuel, ils peuvent tester si le bras peut atteindre chaque localisation, ajuster ses trajectoires pour éviter des collisions et estimer la durée des tâches, le tout avant de construire ou de reconfigurer l’équipement physique. Le jumeau numérique reste connecté au robot réel pendant l’opération, permettant l’échange permanent de positions et de mouvements. Ce lien facilite l’affinage du système, la correction des décalages — comme de petites différences dans le pointage d’un laser — et la mise à jour rapide des programmes lorsque les conceptions de turbines changent.
Un essai en usine sur une tâche d’assemblage délicate
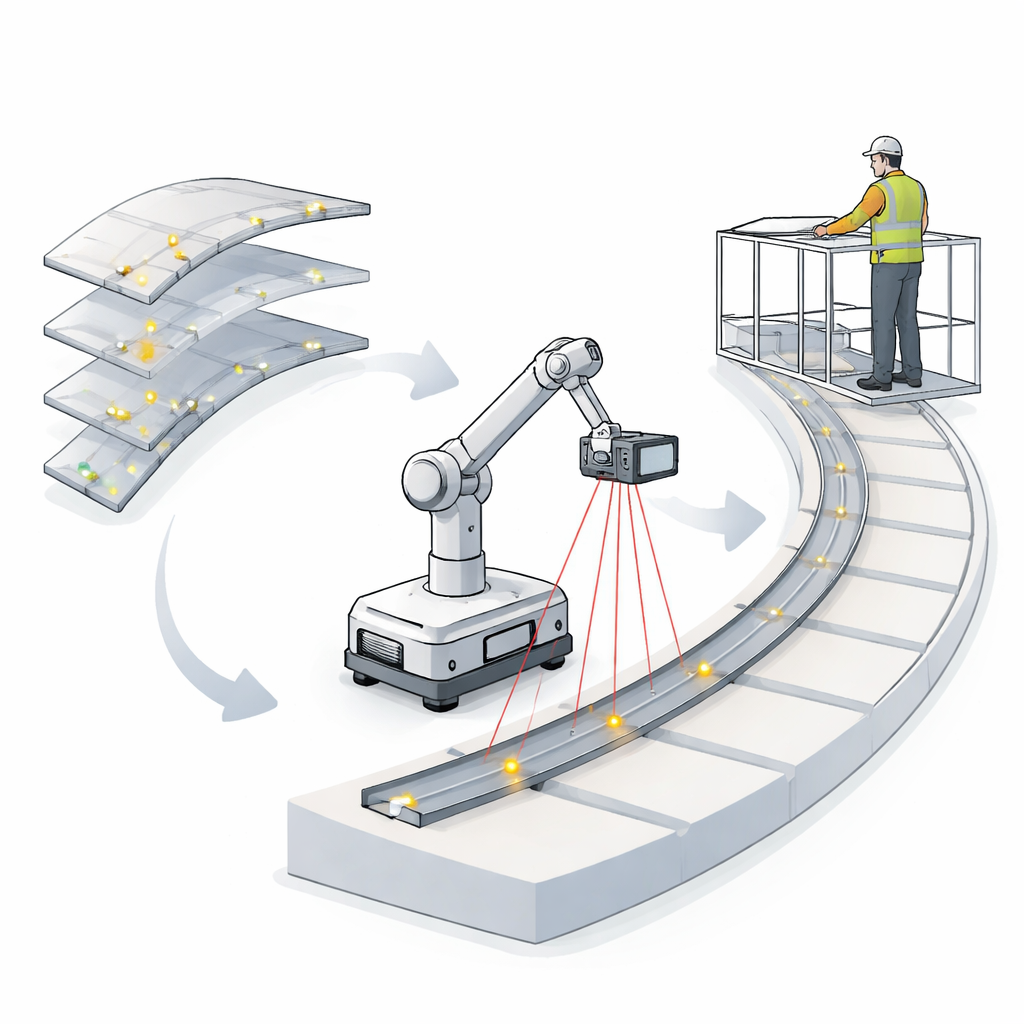
Pour montrer la faisabilité du concept, les chercheurs se sont associés à un grand fabricant d’éoliennes et ont abordé un goulot d’étranglement précis : l’installation de dizaines de chemins de câbles sur un grand cadre en acier à l’intérieur de la nacelle. Auparavant, les ouvriers devaient mesurer à la main le long d’une surface courbe, peinant à apprécier les profondeurs et introduisant souvent de petites erreurs de positionnement qui entraînaient ensuite des câbles trop courts. L’assistant robot mobile a été équipé d’un outil personnalisé imprimé en 3D contenant plusieurs unités laser. Guidé par le jumeau numérique, le robot projette des lignes fines et lumineuses sur le cadre d’acier aux emplacements et aux angles exacts où les chemins doivent être montés. Un ouvrier, placé sur une plateforme ou à l’intérieur du cadre, aligne simplement chaque chemin sur les marquages lasers au lieu de mesurer à répétition. Les tests ont montré que le système maintenait les erreurs de positionnement à quelques millimètres, éliminait les problèmes de longueur de câble lors des essais et réduisait le temps d’assemblage d’environ quarante minutes à environ vingt‑cinq minutes par cadre — une réduction d’environ un tiers.
Garder le contrôle au poignet de l’ouvrier
Parce que le robot opère à proximité des personnes, la façon dont les ouvriers interagissent avec lui est cruciale. L’équipe a testé plusieurs options de contrôle sans fil, notamment des télécommandes portatives et des smartphones, et a constaté que la montre connectée fonctionnait le mieux en milieu d’atelier. Ses boutons simples permettent aux opérateurs de démarrer, mettre en pause ou déplacer le robot vers l’emplacement suivant sans se rendre à un panneau de commande. En coulisses, un petit relais intelligent convertit ces pressions de boutons en signaux pour le contrôleur du robot. Les opérateurs ont indiqué que les commandes via la montre semblaient naturelles et pratiques, et que le processus global paraissait plus efficace car ils n’avaient plus à arrêter leur travail pour prendre des mesures ou effectuer des vérifications visuelles répétées. Le système est conçu pour que le robot puisse ensuite être reconfiguré — par exemple avec un changeur d’outil automatique — afin d’exécuter d’autres tâches, comme le montage de boulons, lorsqu’il n’est pas nécessaire pour les chemins de câbles.
Ce que cela signifie pour la fabrication d’énergie propre
L’étude conclut que l’association d’opérateurs humains avec des cobots mobiles et leurs jumeaux numériques peut faciliter la construction des très grandes machines nécessaires à un avenir énergétique propre. Plutôt que de chercher à remplacer les personnes, le système déleste les étapes fastidieuses et sujettes aux erreurs, tout en maintenant les humains aux commandes via des interfaces portables simples. Bien qu’il reste des défis — comme l’ajout d’une mobilité entièrement autonome, l’amélioration de l’étalonnage par vision et la conformité à des règles de sécurité strictes — l’approche a fait ses preuves pour améliorer la précision, réduire le temps de travail et être acceptée par les ouvriers. À mesure que les turbines continuent de croître et que les usines recherchent plus de flexibilité, les auteurs soutiennent que des assistants robotiques adaptables comme celui‑ci pourraient devenir un élément clé pour développer les technologies d’énergie renouvelable.
Citation: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Mots-clés: fabrication d’éoliennes, robots collaboratifs, jumeau numérique, interaction homme-robot, automatisation flexible