Clear Sky Science · nl
Aanpasbare mens–robot samenwerking in de productie van windturbines met behulp van digitale tweelingen
Grotere turbines bouwen met slimmer hulp
Windturbines worden enorm; sommige offshore-installaties zijn inmiddels hoog genoeg om met wolkenkrabbers te concurreren. Deze giganten kunnen goedkope, schone energie leveren, maar het in elkaar zetten blijft grotendeels handwerk. Dit artikel onderzoekt hoe fabrieksmedewerkers kunnen samenwerken met nieuwe typen robots en hun virtuele "tweelingen" om belangrijke turbinedelen sneller, veiliger en met minder kostbare fouten te monteren.
Waarom reusachtige turbines een nieuw soort hulp nodig hebben
Moderne windturbines zijn groter en krachtiger geworden omdat grotere rotorbladen meer energie uit de wind halen. Dat resulteert in goedkopere elektriciteit en een kleinere CO2-voetafdruk over de levensduur van een turbine. Toch blijft het vervaardigen van de grote torens, wieken en gondels grotendeels handmatig. Werknemers moeten lange, zware componenten tillen, meten en monteren rond gebogen oppervlakken, vaak in krappe of verhoogde ruimtes. Veel ontwerpwijzigingen maken traditionele, vaste industriële robots minder geschikt, omdat die systemen duur zijn om te herprogrammeren en fabrikanten vastleggen in starre lay-outs. Tegelijkertijd kampen veel landen die complexe turbinedelen maken met vergrijzende arbeidskrachten en tekorten aan vakmensen, wat de druk opvoert om nieuwe manieren te vinden om menselijke arbeiders op de werkvloer te ondersteunen.
Robots die naast mensen werken, niet in plaats van hen
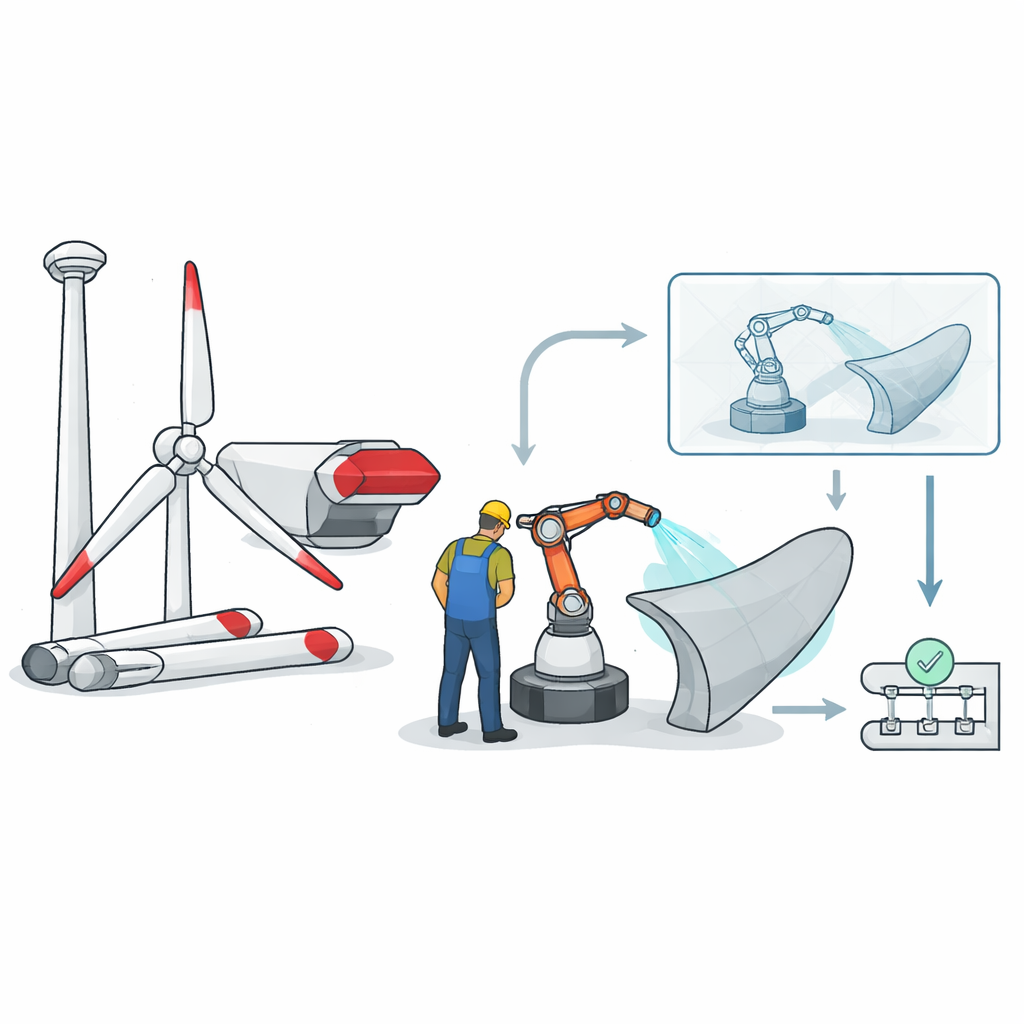
De auteurs richten zich op een klasse machines die collaborative robots of cobots worden genoemd, ontworpen om ruimte te delen met mensen in plaats van achter veiligheidshekken te staan. In tegenstelling tot traditionele robots die voor één smal taakgebied zijn gebouwd, combineert de voorgestelde mobiele robotassistent een kleine robotarm met een wielbasis zodat hij tussen werkstations kan bewegen. De assistent is bedoeld om repetitief, nauwkeurig werk te doen terwijl mensen taken met veel beoordelingsvermogen uitvoeren, zoals inspectie en probleemoplossing. Om dit systeem aanpasbaar te maken in plaats van gespecialiseerd, ontwerpen de onderzoekers het rond modulaire hardware — gereedschappen die aan de pols van de robot verwisseld kunnen worden — en flexibele software die voor nieuwe producten en taken herconfigureerbaar is. Een centraal idee is dat mensen de leiding houden, waarbij de robot fungeert als een bekwame hulp die daar ingezet kan worden waar hij het meest nodig is.
Een virtuele tweeling gebruiken om de robot te ontwerpen en te sturen
Een belangrijke innovatie in dit werk is het gebruik van een digitale tweeling: een virtuele, hoge-fideliteitskopie van de robot, zijn gereedschappen en de turbinedelen die hij zal monteren. Ingenieurs importeren turbineontwerpen uit CAD-bestanden in simulatiesoftware en programmeren de robot om specifieke punten op die onderdelen te bereiken. In deze virtuele wereld kunnen ze testen of de arm elke locatie kan bereiken, paden aanpassen om botsingen te vermijden en inschatten hoe lang taken duren, allemaal voordat fysieke apparatuur wordt gebouwd of herconfigureerd. De digitale tweeling blijft tijdens de operatie verbonden met de echte robot, waardoor posities en bewegingen heen en weer uitgewisseld kunnen worden. Deze koppeling maakt het eenvoudiger het systeem fijn af te stemmen, offsets te corrigeren zoals kleine verschillen in waar een laser wijst, en programma's snel bij te werken wanneer turbineontwerpen veranderen.
Een echte fabriekstest op een lastige montagetaak
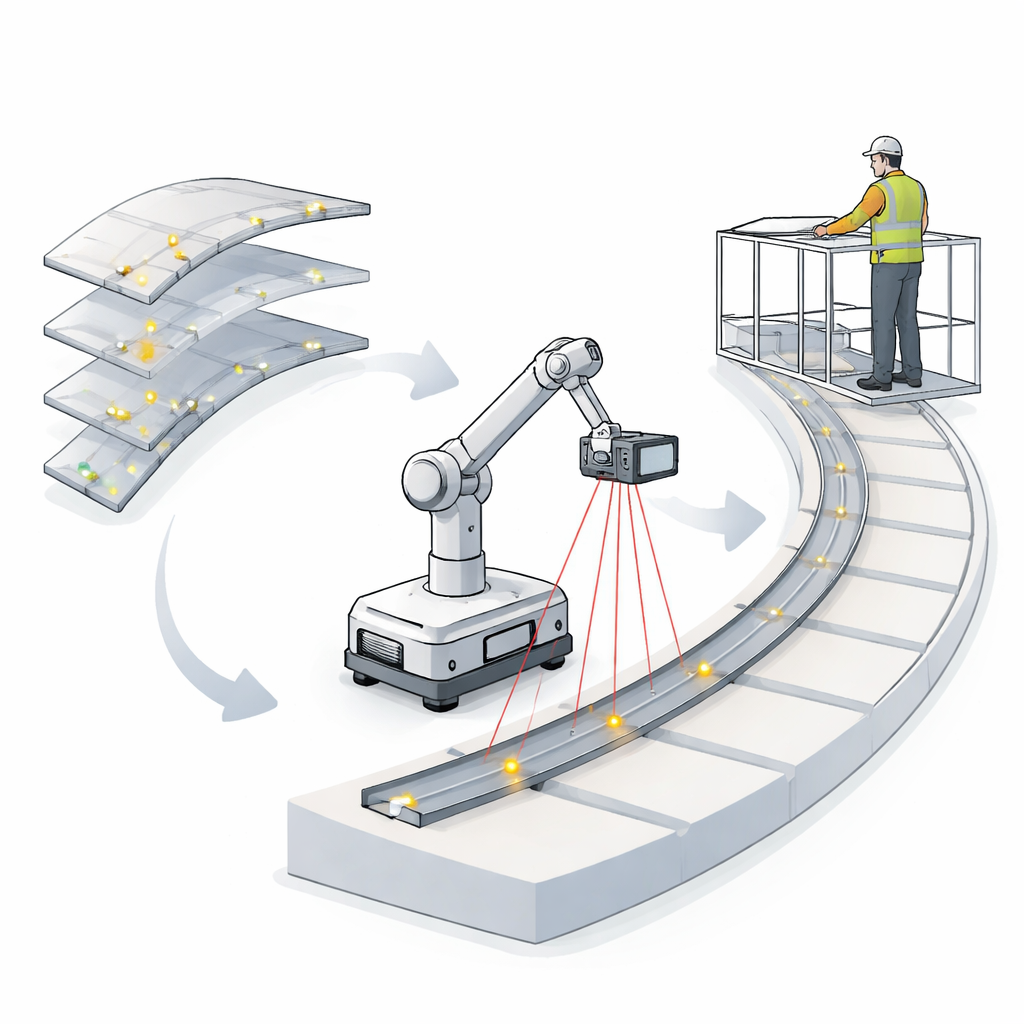
Om te laten zien hoe het concept in de praktijk werkt, werkten de onderzoekers samen met een vooraanstaande fabrikant van windturbines en pakten een specifiek knelpunt aan: het installeren van tientallen kabelgoten op een groot stalen frame in de gondel van de turbine. Voorheen moesten werknemers met de hand meten langs een gebogen oppervlak, waarbij dieptesinschatting lastig was en vaak kleine plaatsingsfouten ontstonden die later tot te korte kabels leidden. De mobiele robotassistent kreeg een op maat gemaakt, 3D-geprint gereedschap dat meerdere laserunits draagt. Aangestuurd door de digitale tweeling projecteert de robot dunne, felle lijnen op het stalen frame op precies de plekken en hoeken waar goten gemonteerd moeten worden. Een medewerker, staand op een platform of binnenin het frame, hoeft elke goot alleen op de lasermarkeringen uit te lijnen in plaats van steeds opnieuw te meten. Tests toonden aan dat het systeem plaatsingsfouten binnen enkele millimeters kon houden, kabellengteproblemen in de proefopstellingen uitroeide en de assemblagetijd per frame verkortte van ongeveer veertig minuten naar zo'n vijfentwintig minuten — een verlaging van ongeveer een derde.
De controle aan de pols van de medewerker houden
Aangezien de robot dicht bij mensen werkt, is de manier waarop werknemers ermee interactie hebben cruciaal. Het team experimenteerde met meerdere draadloze bedieningsopties, waaronder handheld-remotebedieningen en smartphones, en ontdekte dat een smartwatch op de werkvloer het beste werkte. De eenvoudige knoppen stellen operators in staat de robot te starten, te pauzeren of naar de volgende locatie te verplaatsen zonder naar een bedieningspaneel te hoeven lopen. Achter de schermen zet een kleine slimme relais deze knopdrukken om in signalen voor de robotcontroller. Operators gaven aan dat de smartwatch-bediening natuurlijk en handig aanvoelde, en het volledige proces leek efficiënter omdat ze niet langer hoefden te stoppen om te meten of herhaalde visuele controles uit te voeren. Het systeem is zo ontworpen dat de robot later kan worden hergeconfigureerd — bijvoorbeeld met een automatische gereedschapswisselaar — om andere taken uit te voeren zoals boutmontage wanneer hij niet voor kabelgoten nodig is.
Wat dit betekent voor de productie van schone energie
De studie concludeert dat het koppelen van menselijke werknemers aan mobiele cobots en hun digitale tweelingen het makkelijker kan maken om de zeer grote machines te bouwen die nodig zijn voor een toekomst met schone energie. In plaats van erop gericht te zijn mensen te vervangen, neemt het systeem saaie en foutgevoelige stappen uit handen, terwijl mensen via eenvoudige draagbare interfaces de controle houden. Hoewel er nog uitdagingen liggen — zoals het toevoegen van volledige autonome mobiliteit, het verbeteren van visie-gebaseerde calibratie en het voldoen aan strikte veiligheidsregels — bleek de aanpak in staat nauwkeurigheid te verbeteren, arbeidstijd te verkorten en acceptatie door werknemers te bereiken. Nu turbines blijven groeien en fabrieken manieren zoeken om flexibel te blijven, stellen de auteurs dat aanpasbare robotassistenten als deze een sleutelrol kunnen worden bij het opschalen van hernieuwbare energietechnologieën.
Bronvermelding: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Trefwoorden: productie van windturbines, collaboratieve robots, digitale tweeling, mens-robotinteractie, flexibele automatisering