Clear Sky Science · it
Collaborazione adattiva uomo–robot nella produzione di turbine eoliche mediante gemelli digitali
Costruire turbine più grandi con aiuti più intelligenti
Le turbine eoliche stanno diventando enormi: alcune macchine offshore oggi raggiungono altezze paragonabili a quelle dei grattacieli. Questi giganti possono fornire elettricità a basso costo e a basso impatto ambientale, ma l’assemblaggio resta un lavoro complesso e manuale. Questo articolo esplora come gli operai di fabbrica possano collaborare con nuove tipologie di robot e i loro «gemelli» virtuali per montare parti chiave delle turbine in modo più rapido, più sicuro e con meno errori costosi.
Perché le turbine giganti richiedono un nuovo tipo di supporto
Le turbine moderne sono cresciute in dimensioni e potenza perché rotori più grandi catturano più energia dal vento. Il risultato è elettricità più economica e un’impronta di carbonio ridotta nell’arco di vita di ogni turbina. Tuttavia, la produzione delle grandi torri, pale e gondole rimane in larga parte manuale. Gli operatori devono sollevare, misurare e assemblare componenti lunghi e pesanti su superfici curve, spesso in spazi ristretti o in quota. I frequenti cambi di progetto rendono i robot industriali tradizionali poco adatti, poiché sono costosi da riconfigurare e vincolano i produttori a layout rigidi. Allo stesso tempo, molti paesi che costruiscono componenti complessi per turbine affrontano forze lavoro invecchiate e carenze di personale qualificato, aumentando la pressione per trovare nuovi modi di supportare gli operatori in fabbrica.
Robot che lavorano accanto alle persone, non al loro posto
Gli autori si concentrano su una classe di macchine chiamate robot collaborativi, o cobot, progettati per condividere lo spazio con le persone invece di rimanere dietro barriere di sicurezza. A differenza dei robot tradizionali progettati per un compito ristretto, l’assistente robotico mobile proposto combina un piccolo braccio robotico con una base su ruote in modo da potersi spostare tra le postazioni. L’assistente è pensato per gestire lavori ripetitivi e di precisione mentre gli esseri umani svolgono compiti che richiedono giudizio, come ispezione e risoluzione di problemi. Per rendere il sistema adattabile anziché monofunzionale, il team lo progetta attorno a hardware modulare—strumenti che possono essere sostituiti sul polso del robot—e a software flessibile che può essere riconfigurato per nuovi prodotti e attività. Un’idea centrale è che gli umani restino al comando, con il robot che agisce come un aiutante qualificato che può essere riassegnato dove serve di più.
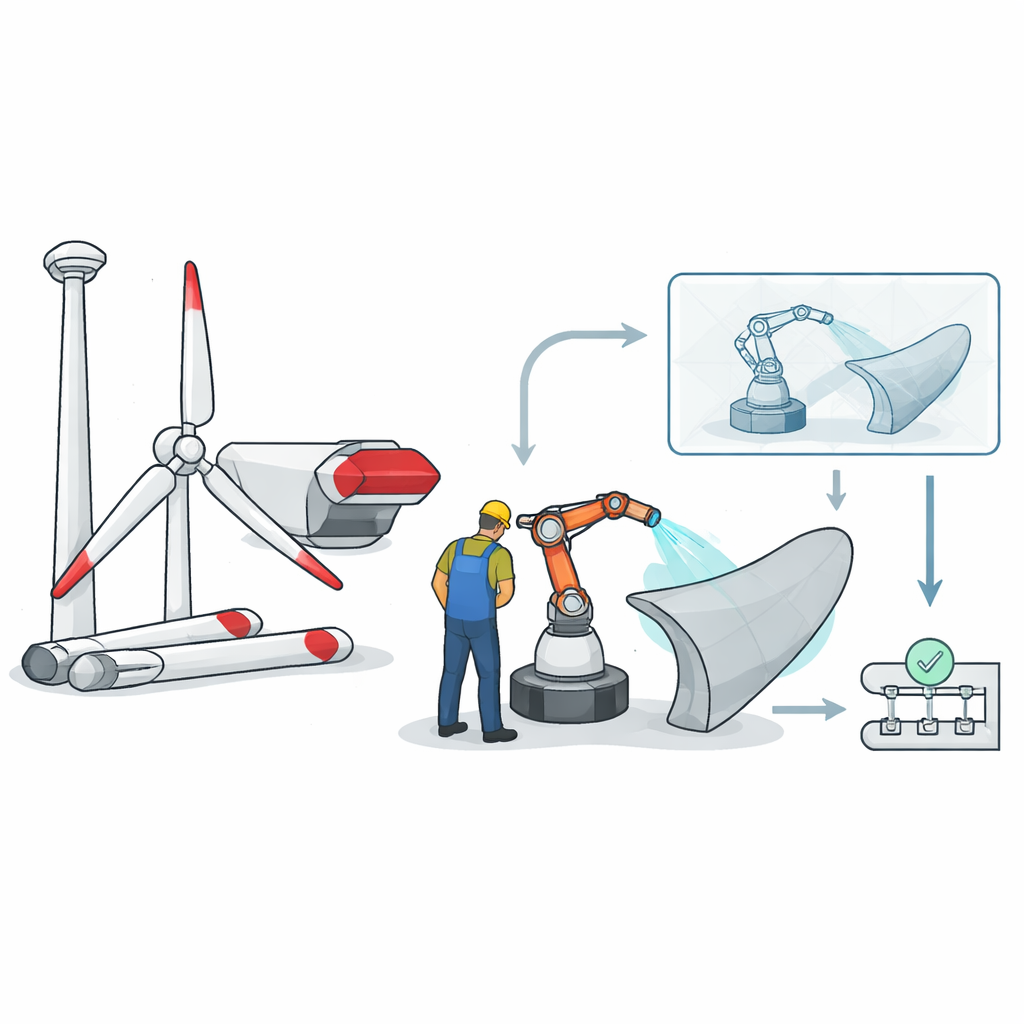
Usare un gemello virtuale per progettare e guidare il robot
Un’innovazione chiave in questo lavoro è l’uso di un gemello digitale: una copia virtuale ad alta fedeltà del robot, dei suoi utensili e delle parti della turbina che andrà ad assemblare. Gli ingegneri importano i progetti delle turbine dai file CAD nel software di simulazione e programmando il robot per raggiungere punti specifici su quelle parti. In questo mondo virtuale possono verificare se il braccio può raggiungere ogni posizione, regolare i percorsi per evitare collisioni e stimare i tempi delle attività, il tutto prima di costruire o riconfigurare l’attrezzatura fisica. Il gemello digitale resta connesso al robot reale durante l’operazione, permettendo lo scambio bidirezionale di posizioni e traiettorie. Questo collegamento facilita l’affinamento del sistema, la correzione di offset come piccole differenze nel puntamento di un laser e l’aggiornamento rapido dei programmi quando cambiano i progetti delle turbine.
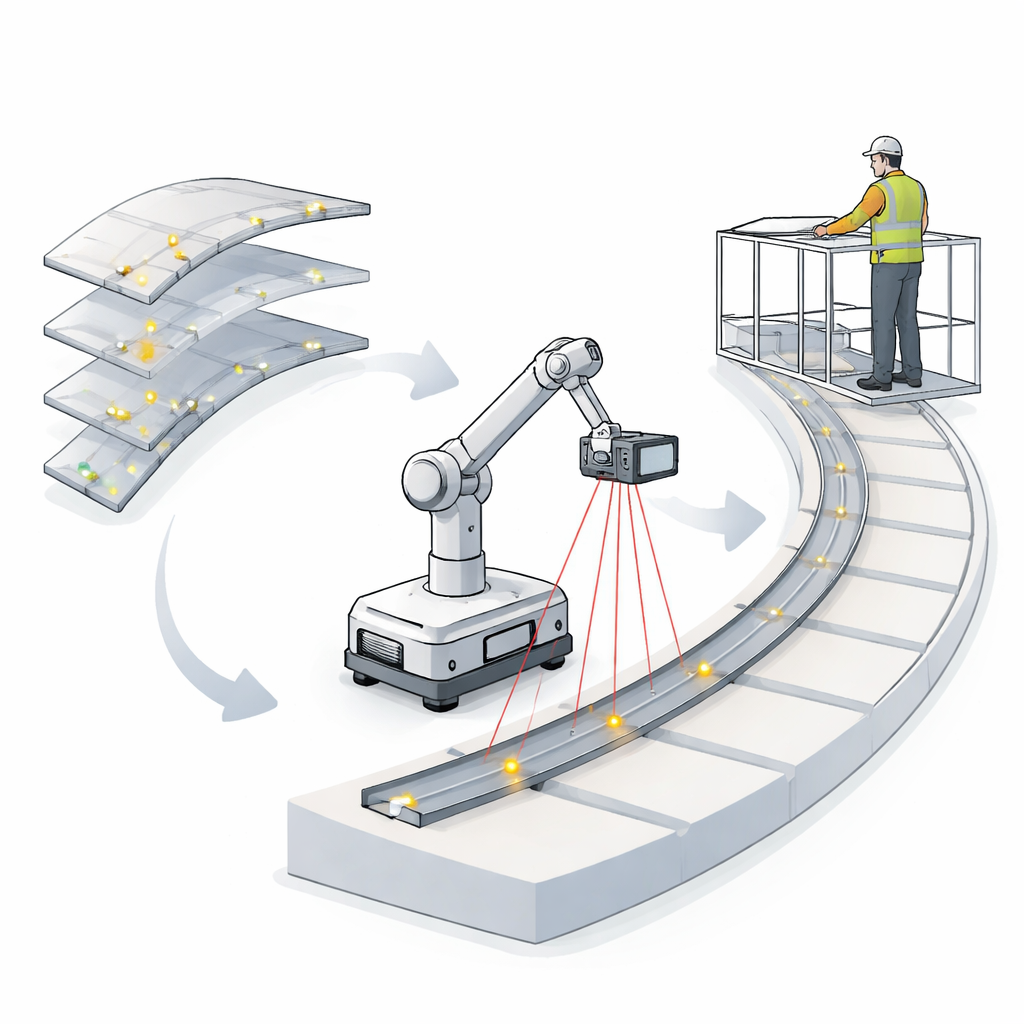
Una prova in una fabbrica reale su un’operazione di assemblaggio difficile
Per dimostrare come il concetto funzioni nella pratica, i ricercatori si sono associati a un importante produttore di turbine eoliche e hanno affrontato un collo di bottiglia specifico: l’installazione di decine di canaline per cavi su un grande telaio d’acciaio all’interno della gondola della turbina. In precedenza gli operai misuravano a mano lungo una superficie curva, con difficoltà di percezione della profondità e introducendo spesso piccoli errori di posizionamento che poi rendevano i cavi troppo corti. L’assistente robotico mobile è stato dotato di un utensile personalizzato stampato in 3D che contiene più unità laser. Guidato dal gemello digitale, il robot proietta linee sottili e intense sulla struttura d’acciaio nei punti e negli angoli esatti in cui le canaline devono essere montate. Un operatore, sulla piattaforma o all’interno del telaio, allinea semplicemente ogni canalina con le marcature laser invece di misurare ripetutamente. I test hanno mostrato che il sistema manteneva gli errori di posizionamento dell’ordine di pochi millimetri, ha eliminato i problemi di lunghezza dei cavi nelle prove e ha ridotto il tempo di assemblaggio da circa quaranta minuti a circa venticinque minuti per telaio—una riduzione di circa un terzo.
Mantenere il controllo al polso dell’operatore
Poiché il robot opera vicino alle persone, il modo in cui gli operatori interagiscono con esso è cruciale. Il team ha sperimentato diverse opzioni di controllo wireless, inclusi telecomandi portatili e smartphone, e ha scoperto che uno smartwatch funzionava meglio in officina. I suoi pulsanti semplici permettono agli operatori di avviare, mettere in pausa o spostare il robot alla posizione successiva senza dover raggiungere un pannello di controllo. Dietro le quinte, un piccolo relè intelligente converte queste pressione di pulsanti in segnali per il controllore del robot. Gli operatori hanno riferito che i controlli via smartwatch risultavano naturali e comodi, e il processo complessivo è sembrato più efficiente perché non dovevano più interrompere il lavoro per prendere misure o effettuare ripetuti controlli visivi. Il sistema è progettato in modo che il robot possa essere poi riconfigurato—con un cambiattrezzi automatico, per esempio—per svolgere altri compiti come l’assemblaggio di bulloni quando non è necessario per le canaline.
Cosa significa per la produzione di energia pulita
Lo studio conclude che associare lavoratori umani a cobot mobili e ai loro gemelli digitali può rendere più semplice costruire le macchine molto grandi necessarie per un futuro energetico pulito. Invece di puntare a sostituire le persone, il sistema scarica i passaggi noiosi e soggetti a errore, mantenendo gli esseri umani al comando tramite interfacce indossabili semplici. Sebbene rimangano sfide—come aggiungere mobilità completamente autonoma, migliorare la calibrazione basata sulla visione e rispettare regole di sicurezza rigorose—l’approccio si è dimostrato in grado di migliorare la precisione, ridurre i tempi di lavoro e essere accettato dagli operatori. Man mano che le turbine continueranno a crescere e le fabbriche cercheranno modi per rimanere flessibili, gli autori sostengono che assistenti robotici adattabili come questo potrebbero diventare un elemento chiave per l’espansione delle tecnologie rinnovabili.
Citazione: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Parole chiave: produzione di turbine eoliche, robot collaborativi, gemello digitale, interazione uomo-robot, automazione flessibile