Clear Sky Science · pt
Colaboração adaptativa humano–robô na fabricação de turbinas eólicas usando gêmeos digitais
Construindo turbinas maiores com ajuda mais inteligente
As turbinas eólicas estão se tornando enormes, com algumas máquinas offshore agora tão altas quanto arranha‑céus. Esses gigantes podem fornecer eletricidade barata e limpa, mas montá‑los ainda é um trabalho difícil e manual. Este artigo explora como trabalhadores de fábrica podem fazer parceria com novos tipos de robôs e seus “gêmeos” virtuais para montar peças-chave de turbinas mais rápido, com mais segurança e com menos erros caros.
Por que turbinas gigantes precisam de um novo tipo de ajuda
As turbinas modernas cresceram em tamanho e potência porque rotores maiores capturam mais energia do vento. O resultado é eletricidade mais barata e uma pegada de carbono menor ao longo da vida útil de cada turbina. Ainda assim, fabricar as enormes torres, pás e nacelles que as compõem continua sendo, em grande parte, um processo manual. Os trabalhadores precisam levantar, medir e montar componentes longos e pesados em superfícies curvas, muitas vezes em espaços apertados ou elevados. Mudanças frequentes de projeto tornam os robôs industriais tradicionais uma escolha ruim, pois esses sistemas são caros de reprogramar e prendem os fabricantes a layouts rígidos. Ao mesmo tempo, muitos países que fabricam peças complexas para turbinas enfrentam uma força de trabalho envelhecida e escassez de profissionais qualificados, o que aumenta a pressão para encontrar novas formas de apoiar os trabalhadores no chão de fábrica.
Robôs que trabalham ao lado das pessoas, não em seu lugar
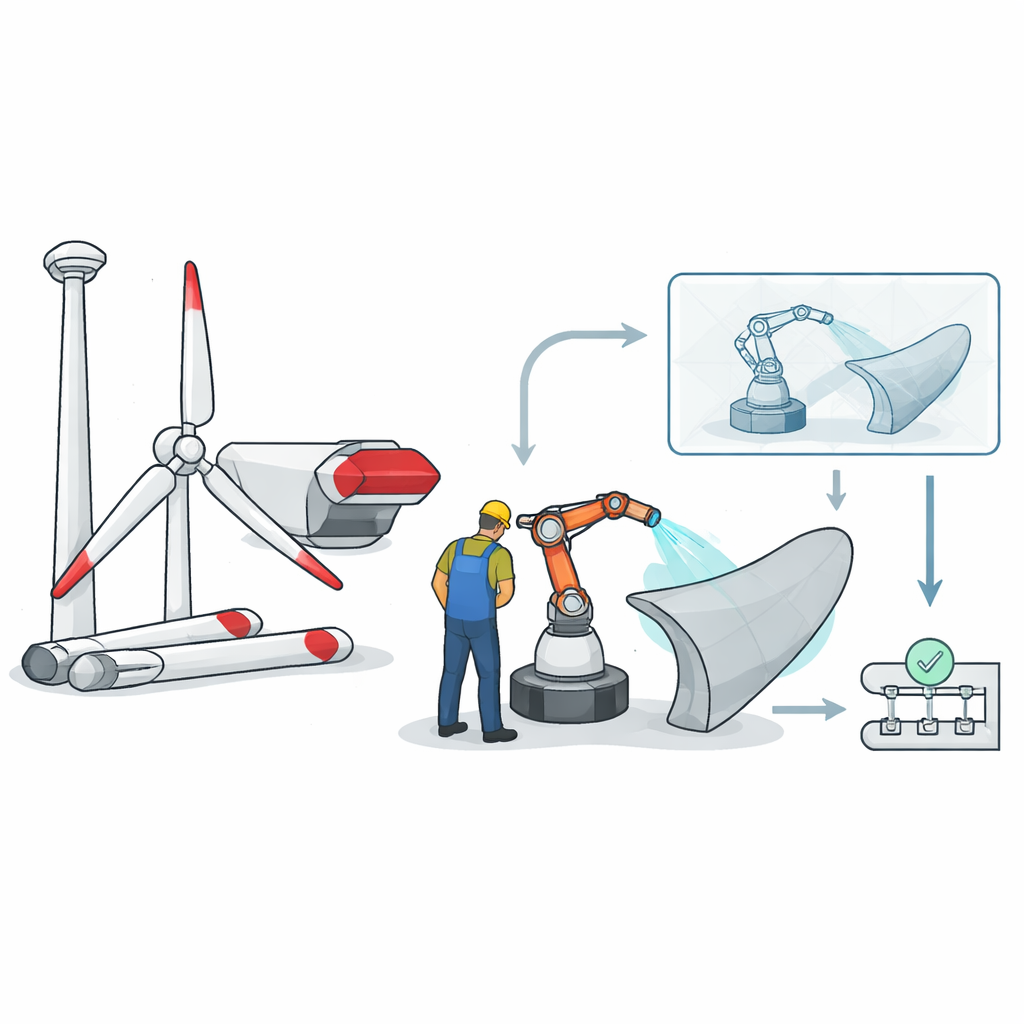
Os autores concentram‑se em uma classe de máquinas chamadas robôs colaborativos, ou cobots, projetados para compartilhar o espaço com pessoas em vez de ficar atrás de cercas de segurança. Ao contrário dos robôs tradicionais criados para uma tarefa estreita, o assistente robótico móvel proposto combina um braço robótico pequeno com uma base com rodas para poder se deslocar entre estações. O assistente destina‑se a lidar com trabalhos repetitivos e de precisão enquanto os humanos realizam tarefas que exigem julgamento, como inspeção e resolução de problemas. Para tornar esse sistema adaptável em vez de monouso, a equipe o projeta em torno de hardware modular — ferramentas que podem ser trocadas no pulso do robô — e software flexível que pode ser reconfigurado para novos produtos e tarefas. Uma ideia central é que os humanos permanecem no comando, com o robô atuando como um ajudante qualificado que pode ser realocado onde for mais necessário.
Usando um gêmeo virtual para projetar e orientar o robô
Uma inovação chave neste trabalho é o uso de um gêmeo digital: uma cópia virtual de alta fidelidade do robô, suas ferramentas e das peças da turbina que ele irá montar. Engenheiros importam projetos de turbinas de arquivos de desenho assistido por computador para um software de simulação e programam o robô para alcançar pontos específicos nessas peças. Nesse mundo virtual, eles podem testar se o braço alcança todas as posições, ajustar suas trajetórias para evitar colisões e estimar quanto tempo as tarefas levarão, tudo antes de construir ou reconfigurar equipamentos físicos. O gêmeo digital permanece conectado ao robô real durante a operação, permitindo que posições e movimentos sejam trocados nos dois sentidos. Essa ligação facilita o ajuste fino do sistema, a correção de compensações como pequenas diferenças no apontamento de um laser, e a atualização rápida de programas quando os projetos das turbinas mudam.
Um teste real de fábrica em uma tarefa de montagem difícil
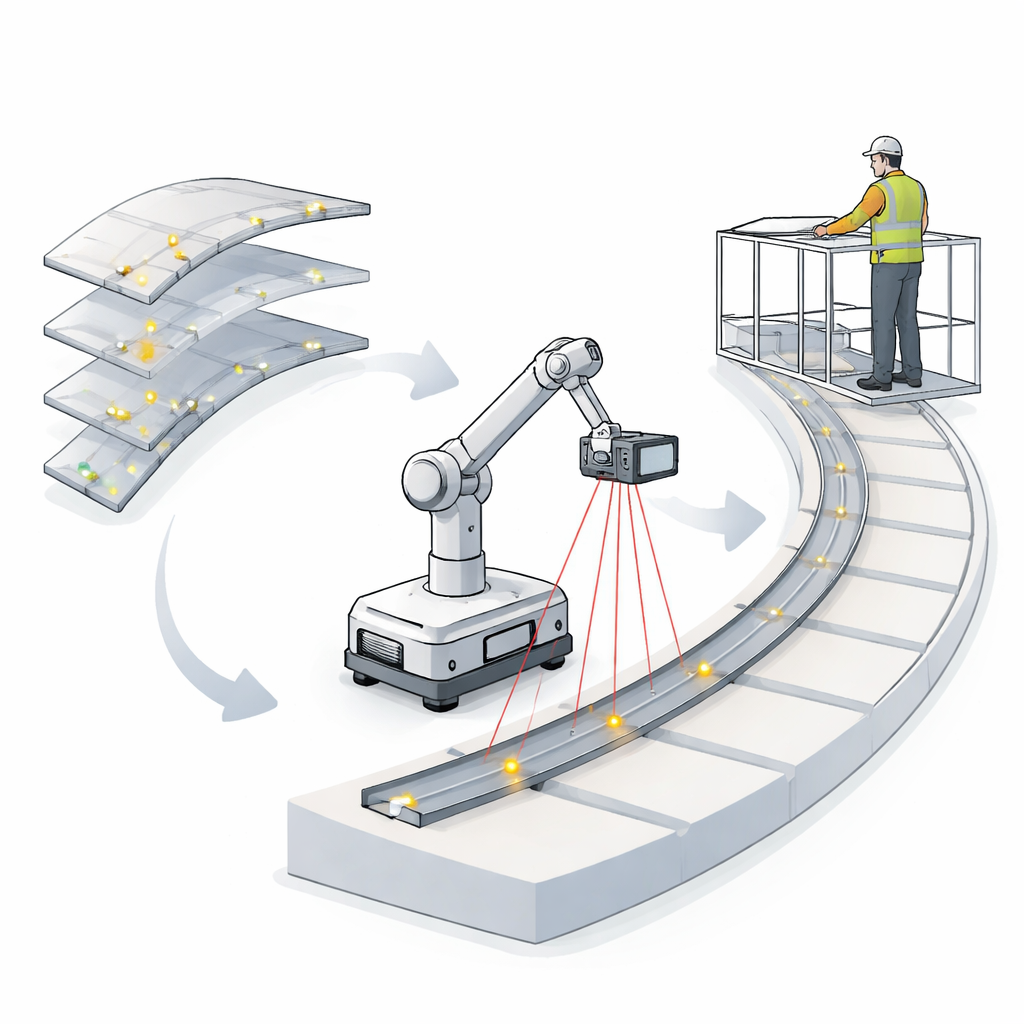
Para mostrar como o conceito funciona na prática, os pesquisadores fizeram parceria com um fabricante líder de turbinas eólicas e enfrentaram um gargalo específico: instalar dezenas de bandejas de cabos em uma grande estrutura de aço dentro da nacelle da turbina. Antes, os trabalhadores precisavam medir manualmente ao longo de uma superfície curva, tendo dificuldade com percepção de profundidade e frequentemente introduzindo pequenos erros de posicionamento que depois faziam os cabos ficarem curtos. O assistente robótico móvel foi equipado com uma ferramenta personalizada impressa em 3D que comporta múltiplas unidades laser. Guiado pelo gêmeo digital, o robô projeta linhas finas e brilhantes na estrutura de aço nos pontos e ângulos exatos onde as bandejas devem ser montadas. Um trabalhador, em uma plataforma ou dentro da estrutura, simplesmente alinha cada bandeja com as marcações a laser em vez de medir repetidamente. Testes mostraram que o sistema manteve erros de posicionamento dentro de alguns milímetros, eliminou problemas de comprimento de cabo nas provas e reduziu o tempo de montagem de aproximadamente quarenta minutos para cerca de vinte e cinco minutos por estrutura — uma redução de cerca de um terço.
Manter o controle no pulso do trabalhador
Como o robô opera perto das pessoas, a forma como os trabalhadores interagem com ele é crucial. A equipe experimentou várias opções de controle sem fio, incluindo controles portáteis e smartphones, e descobriu que um smartwatch funcionou melhor no chão de fábrica. Seus botões simples permitem que os operadores iniciem, pausetem ou movam o robô para o próximo local sem precisar ir até um painel de controle. Nos bastidores, um pequeno relé inteligente converte essas pressões de botão em sinais para o controlador do robô. Os operadores relataram que os controles do smartwatch pareciam naturais e convenientes, e o processo geral ficou mais eficiente porque eles não precisavam mais interromper o trabalho para fazer medições ou verificações visuais repetidas. O sistema foi projetado para que o robô possa ser reconfigurado posteriormente — com um trocador automático de ferramentas, por exemplo — para realizar outras tarefas, como montagem de parafusos, quando não for necessário para bandejas de cabos.
O que isso significa para a fabricação de energia limpa
O estudo conclui que emparelhar trabalhadores humanos com cobots móveis e seus gêmeos digitais pode tornar mais fácil construir as máquinas muito grandes necessárias para um futuro de energia limpa. Em vez de buscar substituir pessoas, o sistema descarrega etapas tediosas e sujeitas a erros, mantendo os humanos no comando por meio de interfaces vestíveis simples. Embora ainda existam desafios a enfrentar — como adicionar mobilidade totalmente autônoma, melhorar a calibração baseada em visão e atender a regras de segurança rigorosas — a abordagem mostrou ser capaz de melhorar a precisão, reduzir o tempo de trabalho e ser aceita pelos trabalhadores. À medida que as turbinas continuam a crescer e as fábricas procuram maneiras de permanecer flexíveis, os autores argumentam que assistentes robóticos adaptáveis como esse poderiam se tornar uma peça-chave na ampliação das tecnologias de energia renovável.
Citação: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Palavras-chave: fabricação de turbinas eólicas, robôs colaborativos, gêmeo digital, interação humano-robô, automação flexível