Clear Sky Science · ja
デジタルツインを用いた風力タービン製造における適応型ヒト・ロボット協調
より大きなタービンを賢い支援で組み立てる
風力タービンは巨大化しており、海上の一部の機体は高層ビルにも匹敵する高さになっています。これらの巨大機は安価でクリーンな電力を供給しますが、組み立て作業は依然として手作業が中心で難しい作業です。本稿では、工場の作業者が新しい種類のロボットとその仮想的な「ツイン」と協力して、重要なタービン部品をより速く、安全に、かつ高額なミスを減らして組み立てる方法を探ります。
なぜ巨大タービンには新しい支援が必要か
現代の風力タービンは、より大きなローターが風からより多くのエネルギーを取り込むため、規模と出力が拡大しています。その結果として電力のコストが下がり、各タービンのライフタイムでのカーボンフットプリントも小さくなります。しかし、巨大な塔、ブレード、ナセルなどを製造する工程は依然として主に手作業です。作業者は長く重い部材を持ち上げ、測定し、曲面に沿って狭い場所や高所で組み立てなければなりません。頻繁な設計変更は、再プログラムが高コストで固定レイアウトに縛られがちな従来の産業用ロボットを不向きにします。同時に、複雑なタービン部品を生産する多くの国では労働力の高齢化や熟練労働者の不足が進んでおり、工場の現場で人を支援する新たな方法を見つける必要性が高まっています。
人の代わりではなく、人と並んで働くロボット
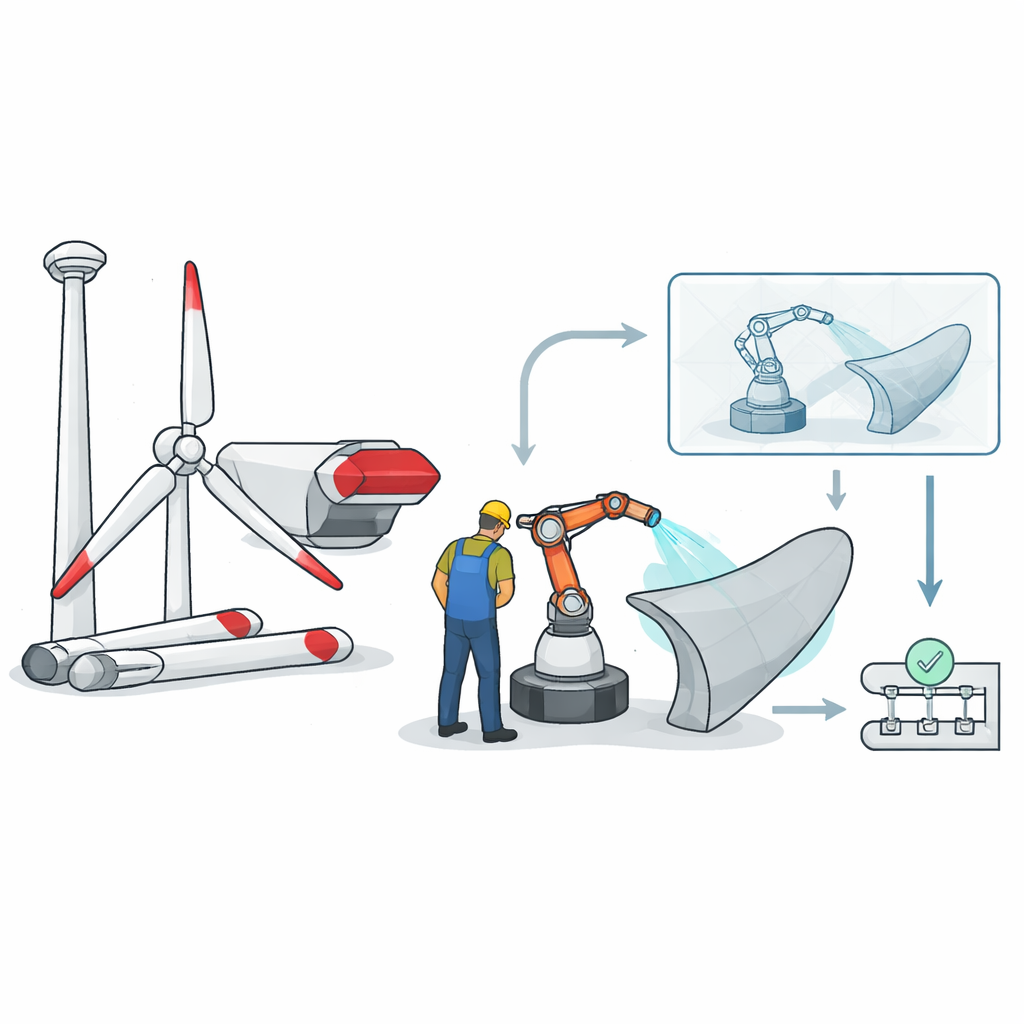
著者らが注目するのは「協働ロボット(コボット)」と呼ばれる機械群で、フェンスの奥に入れて使うのではなく人と同じ空間を共有するよう設計されています。狭い用途に特化した従来型ロボットとは異なり、提案された移動式ロボット支援機は小型のロボットアームと台車状の移動基盤を組み合わせ、作業ステーション間を移動できるようにしています。この支援機は反復的で高精度を要する作業を担い、人は検査や問題解決など判断を要する作業に集中します。単一用途ではなく適応性を持たせるため、チームはロボットの手首に交換可能なツールを取り付けられるモジュール式ハードウェアと、新製品や新作業に再構成可能な柔軟なソフトウェアを設計しました。中心的な考え方は人が主導権を保ち、ロボットは必要な場所に割り当て直せる熟練した補助者のように振る舞うことです。
ロボットを設計・制御するための仮想ツインの活用
本研究の重要な革新はデジタルツインの活用です。これはロボット、そのツール、および組み立てるタービン部品の高精度な仮想コピーです。エンジニアはCADファイルからタービン設計をシミュレーションソフトに取り込み、ロボットが部品上の特定の点に到達するようプログラムします。この仮想空間で、アームがすべての位置に到達できるかを検証し、衝突を避けるために軌道を調整し、作業にかかる時間を見積もることが可能です。すべては物理機器を構築・再構成する前に行えます。デジタルツインは稼働中も実機と接続され、位置や動作の情報が双方向にやり取りされます。この連携によりシステムの微調整、レーザーの照射位置などのオフセット補正、設計変更時のプログラム更新が迅速に行えるようになります。
難易度の高い組み立て作業での実工場試験
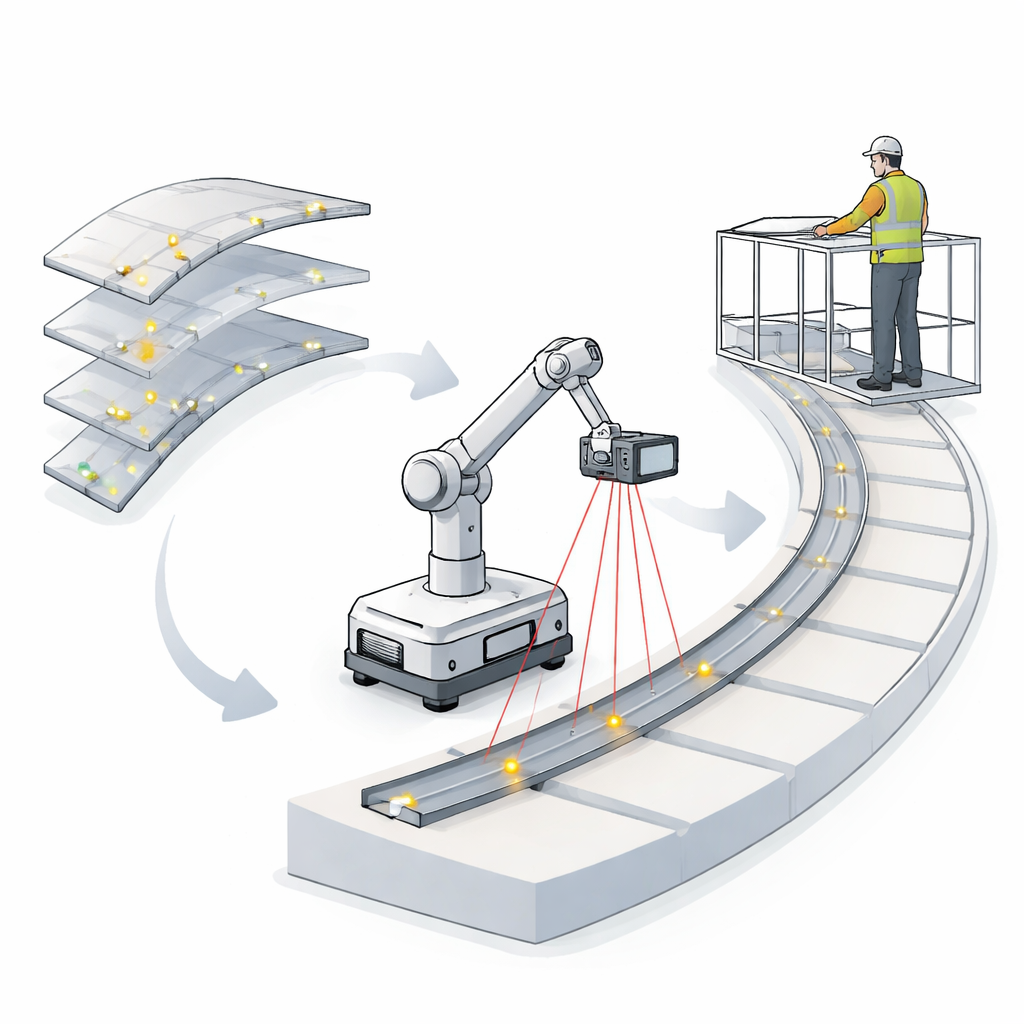
概念の実用性を示すため、研究チームは大手風力タービンメーカーと協力し、具体的なボトルネックに取り組みました:ナセル内部の大型鋼製フレームに多数のケーブルトレイを取り付ける作業です。従来は曲面に沿って手作業で測定する必要があり、奥行き感の把握に苦労して小さな位置誤差が生じ、結果としてケーブルが短くなってしまうことがありました。移動式ロボット支援機には複数のレーザーを保持するカスタムの3Dプリント製ツールが装備されました。デジタルツインに導かれ、ロボットはトレイを取り付ける正確な位置と角度に薄く明るい線を鋼フレーム上に投影します。プラットフォーム上やフレーム内にいる作業者は、何度も測定する代わりにレーザーマークに合わせてトレイを配置すればよくなります。試験では設置誤差を数ミリ程度に抑えられ、トライアルではケーブル長の問題が解消され、フレーム1基あたりの組み立て時間は約40分から約25分に短縮されました。これは約3分の1の削減に相当します。
作業者の手首でコントロールを保つ
ロボットが人の近くで稼働するため、作業者とのインタラクション方法が重要です。チームはハンドヘルドリモコンやスマートフォンなど複数の無線制御方式を試し、作業現場ではスマートウォッチが最も適していると判断しました。シンプルなボタン操作でオペレータはロボットを開始、停止、次の位置へ移動させることができ、制御パネルまで歩いて行く必要がありません。裏側では小型のスマートリレーがこれらのボタン操作をロボットコントローラへの信号に変換します。オペレータはスマートウォッチによる操作が自然で便利だと報告し、測定や視覚チェックのために作業を中断する必要がなくなったことで全体の効率が向上したと感じました。システムは将来的に自動工具切替機などで再構成でき、ケーブルトレイ作業が不要な時にはボルト組付けなど別の作業を行えるよう設計されています。
クリーンエネルギー製造にとっての意義
研究は、移動式コボットとそのデジタルツインを作業者と組み合わせることで、クリーンエネルギーに必要な非常に大きな機械をより容易に製造できると結論づけています。人を置き換えることを目的とするのではなく、面倒でミスが起きやすい工程を肩代わりし、シンプルなウェアラブルインターフェースを通じて人が制御を維持する設計です。完全自律移動の追加、視覚ベースの較正の改善、厳しい安全規則への対応といった課題は残りますが、このアプローチは精度改善、作業時間短縮、作業者の受容という点で有効であることが示されました。タービンがさらに大型化し、工場が柔軟性を求める中で、著者らはこうした適応型ロボット支援が再生可能エネルギー技術のスケールアップにおける重要な一要素になり得ると論じています。
引用: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
キーワード: 風力タービン製造, 協働ロボット, デジタルツイン, ヒューマン・ロボット・インタラクション, 柔軟な自動化