Clear Sky Science · en
Adaptive human–robot collaboration in wind turbine manufacturing using digital twins
Building Bigger Turbines with Smarter Help
Wind turbines are getting enormous, with some offshore machines now tall enough to rival skyscrapers. These giants can deliver cheap, clean electricity, but putting them together is still hard, hands-on work. This article explores how factory workers can team up with new kinds of robots and their virtual "twins" to assemble key turbine parts faster, more safely, and with fewer costly mistakes.
Why Giant Turbines Need a New Kind of Help
Modern wind turbines have grown in size and power because larger rotors capture more energy from the wind. The result is cheaper electricity and a smaller carbon footprint over each turbine’s lifetime. Yet manufacturing the huge towers, blades, and nacelles that sit atop them remains largely manual. Workers must lift, measure, and assemble long, heavy components around curved surfaces, often in cramped or elevated spaces. Frequent design changes make traditional, fixed industrial robots a poor fit, because those systems are expensive to reprogram and lock manufacturers into rigid layouts. At the same time, many countries that build complex turbine parts face aging workforces and shortages of skilled labor, adding pressure to find new ways to support human workers on the factory floor.
Robots That Work Beside People, Not Instead of Them
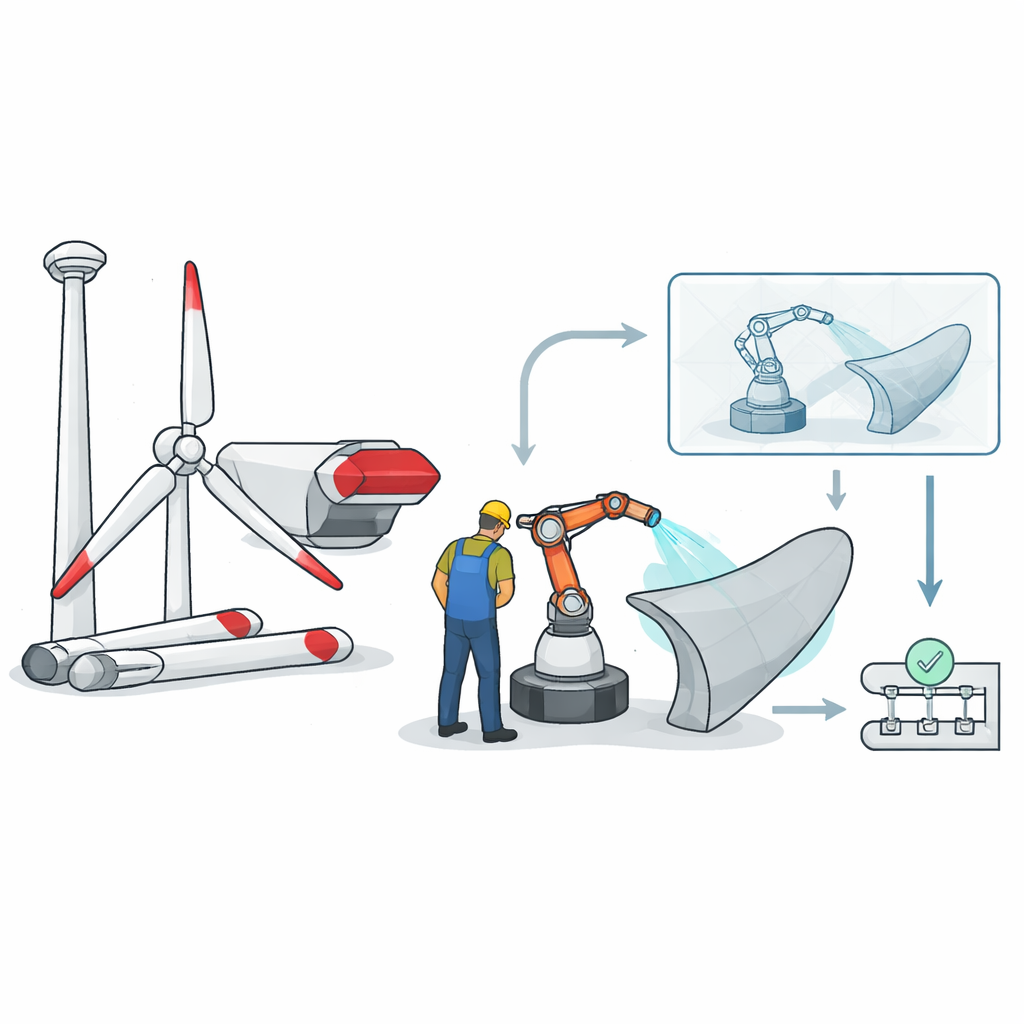
The authors focus on a class of machines called collaborative robots, or cobots, designed to share space with people rather than sit behind safety fences. Unlike traditional robots built for one narrow task, the proposed mobile robot assistant combines a small robotic arm with a wheeled base so it can move between stations. The assistant is meant to handle repetitive, precision work while humans do judgment-heavy tasks such as inspection and problem-solving. To make this system adaptable instead of single-purpose, the team designs it around modular hardware—tools that can be swapped on the robot’s wrist—and flexible software that can be reconfigured for new products and tasks. A central idea is that humans remain in charge, with the robot acting like a skilled helper that can be reassigned where it is most needed.
Using a Virtual Twin to Design and Steer the Robot
A key innovation in this work is the use of a digital twin: a high-fidelity virtual copy of the robot, its tools, and the turbine parts it will assemble. Engineers import turbine designs from computer-aided design files into simulation software and program the robot to reach specific points on those parts. In this virtual world, they can test whether the arm can reach every location, adjust its paths to avoid collisions, and estimate how long tasks will take, all before building or reconfiguring physical equipment. The digital twin remains connected to the real robot during operation, allowing positions and motions to be exchanged back and forth. This link makes it easier to fine-tune the system, correct offsets such as small differences in where a laser points, and update programs quickly when turbine designs change.
A Real Factory Test on a Tricky Assembly Job
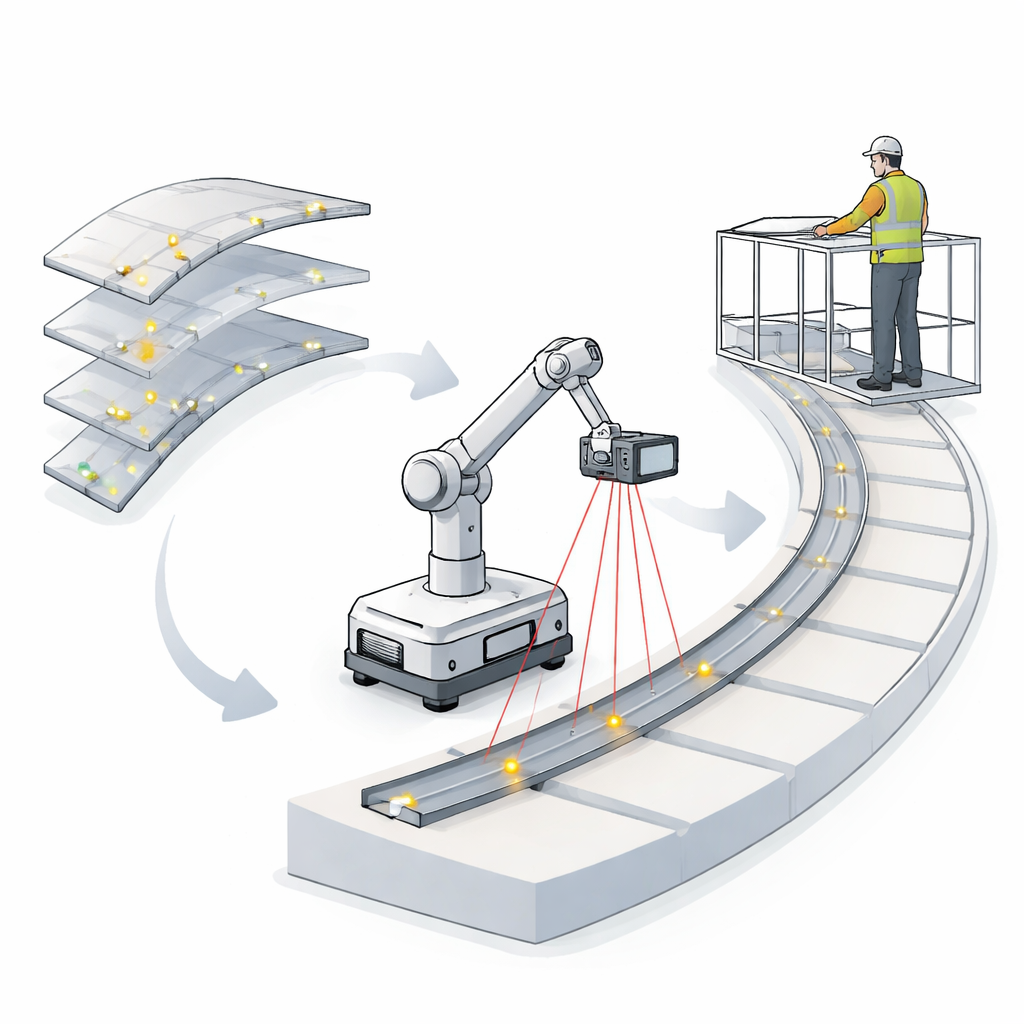
To show how the concept works in practice, the researchers partnered with a leading wind turbine maker and tackled a specific bottleneck: installing dozens of cable trays on a large steel frame inside the turbine’s nacelle. Workers previously had to measure by hand along a curved surface, struggling with depth perception and often introducing small placement errors that later caused cables to be too short. The mobile robot assistant was equipped with a custom, 3D-printed tool that holds multiple laser units. Guided by the digital twin, the robot projects thin, bright lines onto the steel frame at the exact spots and angles where trays must be mounted. A worker, standing on a platform or inside the frame, simply aligns each tray with the laser markings instead of measuring repeatedly. Tests showed the system could keep placement errors within about a few millimeters, eliminated cable-length problems in the trials, and cut assembly time from roughly forty minutes to about twenty-five minutes per frame—a reduction of around one-third.
Keeping Control at the Worker’s Wrist
Because the robot operates near people, the way workers interact with it is crucial. The team experimented with several wireless control options, including handheld remotes and smartphones, and found that a smartwatch worked best on the shop floor. Its simple buttons let operators start, pause, or move the robot to the next location without walking over to a control panel. Behind the scenes, a small smart relay converts these button presses into signals for the robot’s controller. Operators reported that the smartwatch controls felt natural and convenient, and the overall process seemed more efficient because they no longer had to stop work to take measurements or make repeated visual checks. The system is designed so the robot can later be reconfigured—with an automatic tool changer, for example—to perform other tasks such as bolt assembly when it is not needed for cable trays.
What This Means for Clean Energy Manufacturing
The study concludes that pairing human workers with mobile cobots and their digital twins can make it easier to build the very large machines needed for a clean energy future. Instead of aiming to replace people, the system offloads tedious and error-prone steps, while keeping humans in control through simple wearable interfaces. Even though there are still challenges ahead—such as adding full autonomous mobility, improving vision-based calibration, and meeting strict safety rules—the approach proved capable of improving accuracy, cutting labor time, and being accepted by workers. As turbines continue to grow and factories look for ways to stay flexible, the authors argue that adaptable robot assistants like this could become a key piece of the puzzle in scaling up renewable energy technologies.
Citation: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Keywords: wind turbine manufacturing, collaborative robots, digital twin, human robot interaction, flexible automation