Clear Sky Science · ru
Адаптивное взаимодействие человека и робота в производстве ветряных турбин с использованием цифровых двойников
Создание большего размера турбин с более умной помощью
Ветряные турбины становятся гигантскими: некоторые морские установки теперь по высоте могут соперничать с небоскрёбами. Эти гиганты способны обеспечивать недорогое чистое электричество, но их сборка всё ещё остаётся сложной ручной работой. В этой статье рассматривается, как заводские рабочие могут объединяться с новыми типами роботов и их виртуальными «двойниками» для более быстрой, безопасной и менее ошибочной сборки ключевых частей турбины.
Почему большим турбинам нужна новая поддержка
Современные ветряные турбины выросли в размерах и мощности, поскольку большие роторы захватывают больше энергии ветра. Это даёт более дешёвое электричество и меньший углеродный след в расчёте на срок службы одной турбины. Тем не менее производство огромных башен, лопастей и гондол по-прежнему во многом ручное. Рабочим приходится поднимать, измерять и собирать длинные тяжёлые детали по криволинейным поверхностям, часто в стеснённых или приподнятых условиях. Частые изменения конструкций делают традиционных жёстко запрограммированных промышленных роботов непрактичными: их дорого перенастраивать, и они привязывают производителя к фиксированной планировке. Одновременно многие страны, где производят сложные детали турбин, сталкиваются со стареющей рабочей силой и дефицитом квалифицированных кадров, что усиливает потребность в новых способах поддержки людей на заводе.
Роботы, которые работают рядом с людьми, а не вместо них
Авторы сосредоточены на классе машин, называемых коллаборативными роботами, или коботами, разработанными для совместного пребывания в пространстве с людьми, а не за защитными ограждениями. В отличие от традиционных роботов, предназначенных для одной узкой операции, предлагаемый мобильный робот-ассистент сочетает небольшой манипулятор с колесной базой, чтобы перемещаться между рабочими участками. Ассистент призван выполнять повторяющиеся точные операции, тогда как люди занимаются задачами, требующими суждения: инспекцией и решением проблем. Чтобы сделать систему адаптивной, а не узкоспециализированной, команда разрабатывает её вокруг модульного аппаратного обеспечения — инструментов, которые можно менять на запястье робота, — и гибкого программного обеспечения, которое можно перенастроить под новые изделия и операции. Ключевая идея в том, что люди остаются у руля, а робот действует как опытный помощник, которого можно направить туда, где он наиболее нужен.
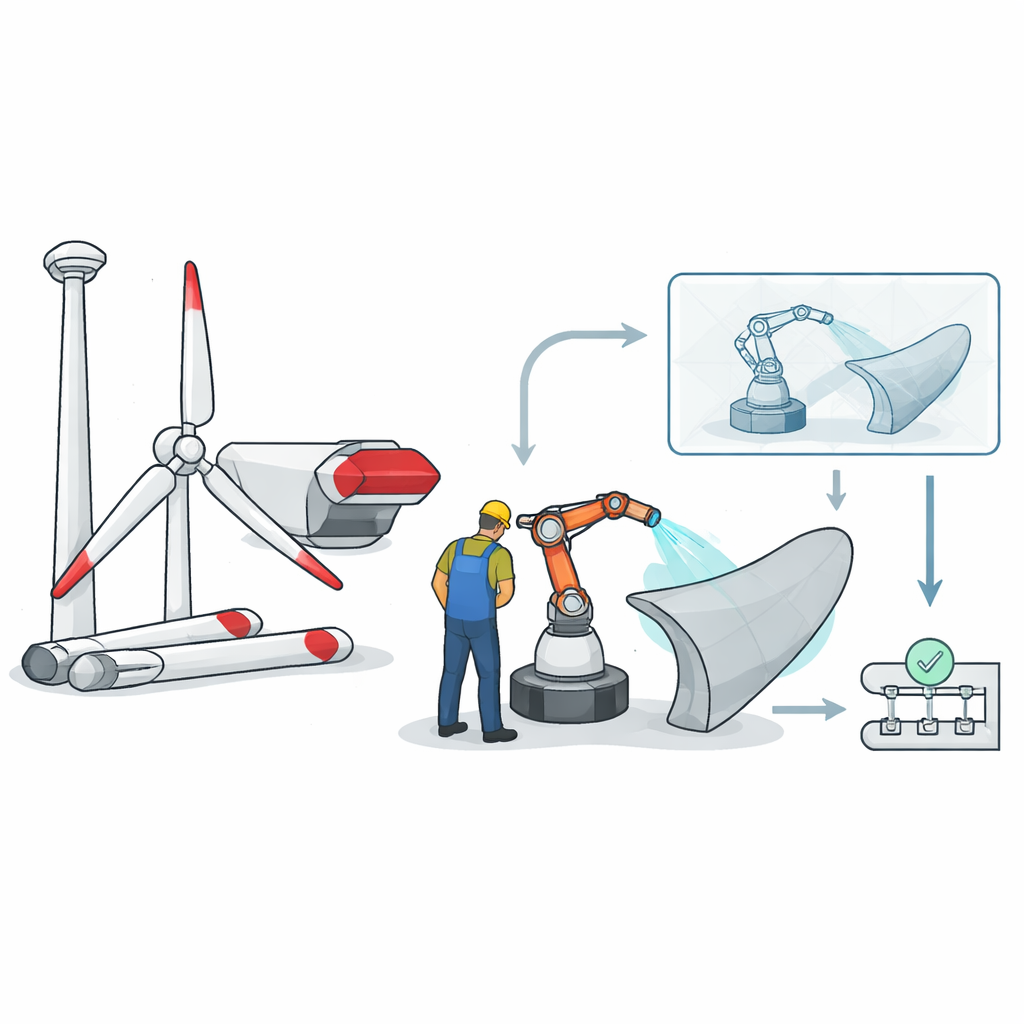
Использование виртуального двойника для проектирования и управления роботом
Ключевым нововведением в этой работе является использование цифрового двойника: высокоточной виртуальной копии робота, его инструментов и частей турбины, которые он будет собирать. Инженеры импортируют конструкции турбин из файлов САПР в программное обеспечение моделирования и программируют робота на достижение конкретных точек на этих деталях. В этом виртуальном мире они могут проверить, может ли манипулятор достать до всех мест, скорректировать траектории, чтобы избежать столкновений, и оценить время выполнения задач — до того, как будет построено или перенастроено физическое оборудование. Цифровой двойник остаётся связанным с реальным роботом во время работы, позволяя обмениваться позициями и движениями в обе стороны. Эта связь упрощает тонкую настройку системы, корректировку смещений, например небольших различий в направлении лазера, и быструю актуализацию программ при изменениях в конструкциях турбин.
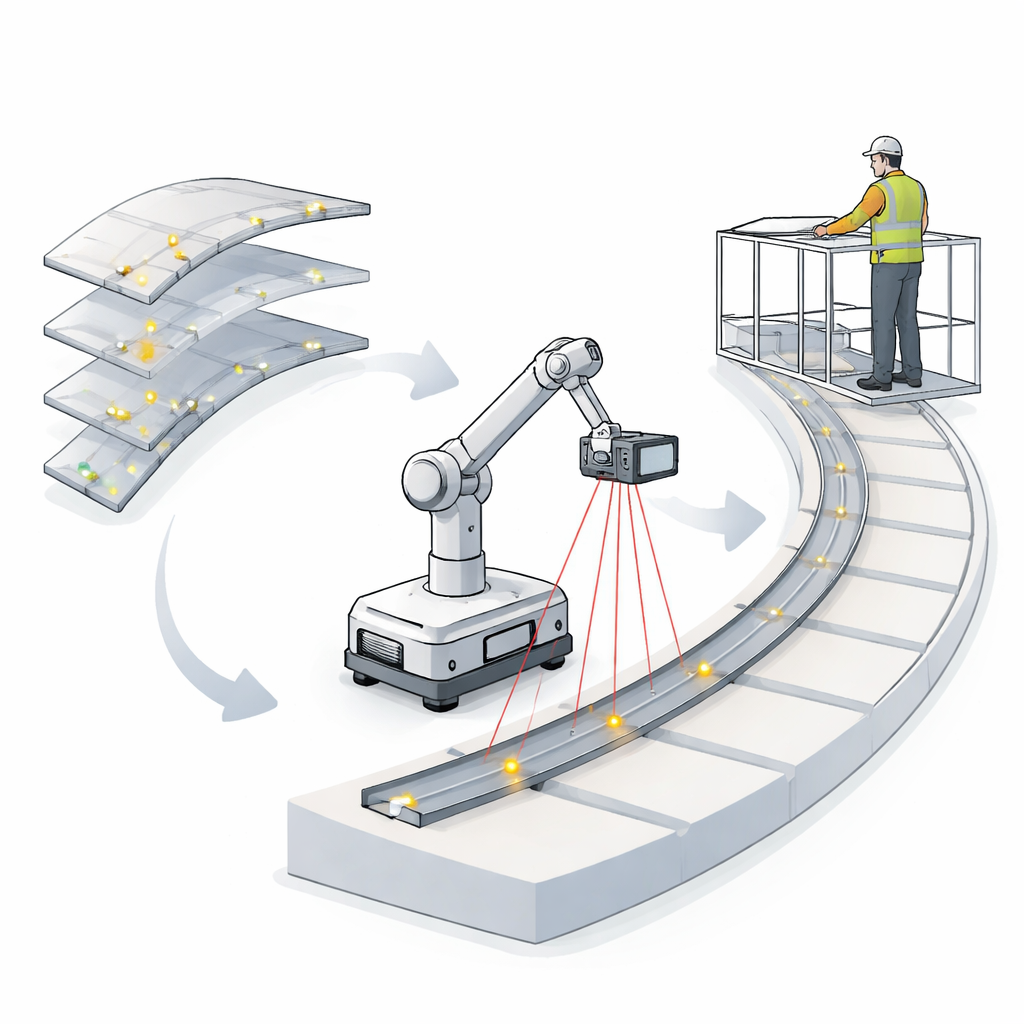
Реальный заводской тест на сложной сборочной задаче
Чтобы показать, как концепция работает на практике, исследователи сотрудничали с ведущим производителем ветряных турбин и взялись за конкретное узкое место: установку десятков лотков для кабелей на крупную стальную раму внутри гондолы турбины. Ранее рабочим приходилось вручную измерять по кривой поверхности, что усложняло оценку глубины и часто приводило к небольшим ошибкам размещения, из‑за которых затем кабели оказывались слишком короткими. Мобильный робот-ассистент был оснащён специализированным 3D‑напечатанным инструментом с несколькими лазерными модулями. Управляемый цифровым двойником, робот проецирует тонкие яркие линии на стальную раму в точных местах и под нужными углами, где должны крепиться лотки. Рабочий, находясь на платформе или внутри рамы, просто совмещает лоток с лазерной разметкой вместо многократных измерений. Испытания показали, что система удерживает ошибки размещения в пределах нескольких миллиметров, устранила проблему длины кабелей в испытаниях и сократила время сборки с примерно сорока минут до приблизительно двадцати пяти минут на раму — сокращение примерно на треть.
Сохранение контроля у рабочего на запястье
Поскольку робот работает рядом с людьми, способ взаимодействия рабочих с ним критически важен. Команда испытала несколько беспроводных вариантов управления, включая ручные пульты и смартфоны, и обнаружила, что на производстве лучше всего подошли смарт‑часы. Их простые кнопки позволяют операторам запускать, приостанавливать или перемещать робота к следующей точке, не подходя к пульту управления. За кулисами небольшой умный реле‑модуль преобразует эти нажатия в сигналы для контроллера робота. Операторы отметили, что управление со смарт‑часов выглядело естественно и удобно, а общий процесс стал эффективнее, потому что им больше не приходилось останавливать работу для измерений или повторных визуальных проверок. Система спроектирована так, чтобы впоследствии робот можно было перенастроить — например, с автоматической сменой инструментов — для выполнения других задач, таких как сборка болтов, когда он не занят установкой кабельных лотков.
Что это означает для производства чистой энергии
Исследование делает вывод, что сочетание человеческого труда с мобильными коботами и их цифровыми двойниками может упростить производство очень больших машин, необходимых для будущего с чистой энергией. Вместо попыток заменить людей система снимает рутинные и склонные к ошибкам этапы, при этом сохраняя контроль за людьми через простые носимые интерфейсы. Хотя ещё остаются задачи — например, добиться полной автономной мобильности, улучшить калибровку на основе зрения и соответствовать строгим требованиям безопасности — подход показал способность повышать точность, сокращать трудозатраты и получать одобрение со стороны сотрудников. По мере роста размеров турбин и стремления заводов к гибкости авторы утверждают, что адаптивные робот‑ассистенты, подобные описанным, могут стать ключевым элементом в масштабировании технологий возобновляемой энергии.
Цитирование: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Ключевые слова: производство ветряных турбин, коллаборативные роботы, цифровой двойник, взаимодействие человека и робота, гибкая автоматизация