Clear Sky Science · es
Colaboración humano–robot adaptable en la fabricación de aerogeneradores mediante gemelos digitales
Construir turbinas más grandes con ayuda más inteligente
Los aerogeneradores se están volviendo enormes; algunas máquinas marinas alcanzan alturas comparables a rascacielos. Estos gigantes pueden generar electricidad barata y limpia, pero su montaje sigue siendo un trabajo manual y exigente. Este artículo explora cómo los trabajadores de fábrica pueden colaborar con nuevos tipos de robots y sus "gemelos" virtuales para ensamblar piezas clave de las turbinas más rápido, con mayor seguridad y con menos errores costosos.
Por qué las turbinas gigantes necesitan otro tipo de ayuda
Los aerogeneradores modernos han crecido en tamaño y potencia porque los rotores mayores capturan más energía del viento. El resultado es electricidad más barata y una huella de carbono menor a lo largo de la vida útil de cada turbina. Sin embargo, la fabricación de las enormes torres, palas y góndolas sigue siendo en gran medida manual. Los trabajadores deben levantar, medir y ensamblar componentes largos y pesados sobre superficies curvas, a menudo en espacios reducidos o en altura. Los cambios frecuentes de diseño hacen que los robots industriales fijos tradicionales sean una mala opción, ya que son caros de reprogramar y atan a los fabricantes a disposiciones rígidas. Al mismo tiempo, muchos países que fabrican piezas complejas para turbinas afrontan envejecimiento de la fuerza laboral y escasez de mano de obra cualificada, lo que aumenta la presión para encontrar nuevas formas de apoyar a los trabajadores en planta.
Robots que trabajan junto a las personas, no en su lugar
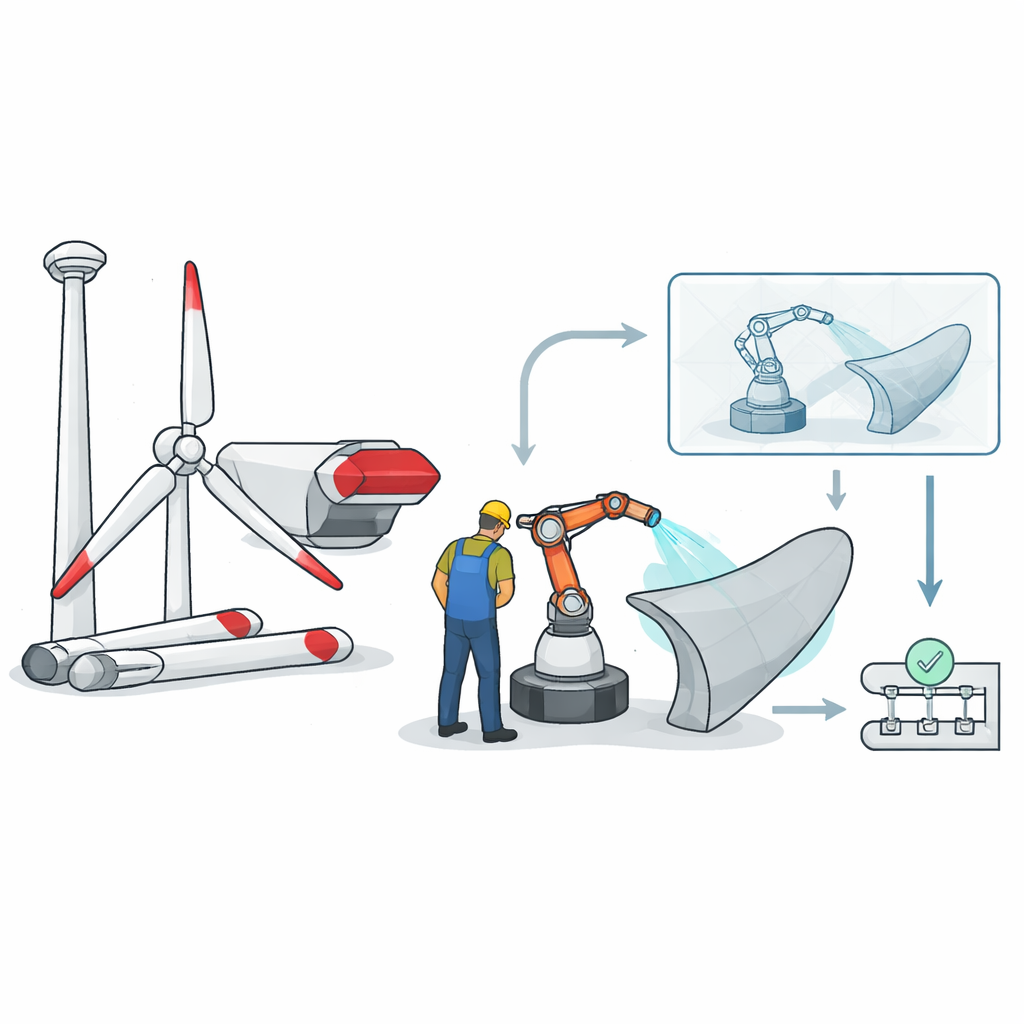
Los autores se centran en una clase de máquinas llamadas robots colaborativos, o cobots, diseñados para compartir el espacio con las personas en lugar de estar tras barreras de seguridad. A diferencia de los robots tradicionales creados para una tarea única y estrecha, el asistente robótico móvil propuesto combina un pequeño brazo robótico con una base con ruedas para poder desplazarse entre puestos. El asistente está pensado para encargarse de trabajos repetitivos y de precisión, mientras los humanos realizan tareas que requieren juicio, como la inspección y la resolución de problemas. Para que el sistema sea adaptable y no de un solo propósito, el equipo lo diseña en torno a hardware modular —herramientas intercambiables en la muñeca del robot— y software flexible que pueda reconfigurarse para nuevos productos y tareas. Una idea central es que los humanos siguen al mando, con el robot actuando como un ayudante cualificado que puede reasignarse donde más se le necesite.
Usar un gemelo virtual para diseñar y guiar al robot
Una innovación clave de este trabajo es el uso de un gemelo digital: una copia virtual de alta fidelidad del robot, sus herramientas y las piezas de la turbina que ensamblará. Los ingenieros importan diseños de turbinas desde archivos de diseño asistido por ordenador al software de simulación y programan el robot para alcanzar puntos concretos en esas piezas. En este mundo virtual pueden comprobar si el brazo alcanza todas las ubicaciones, ajustar sus trayectorias para evitar colisiones y estimar cuánto tiempo tomarán las tareas, todo antes de construir o reconfigurar el equipo físico. El gemelo digital permanece conectado al robot real durante la operación, permitiendo intercambiar posiciones y movimientos en tiempo real. Este vínculo facilita afinar el sistema, corregir desajustes como pequeñas diferencias en dónde apunta un láser y actualizar programas rápidamente cuando cambian los diseños de las turbinas.
Una prueba real en fábrica sobre un montaje complejo
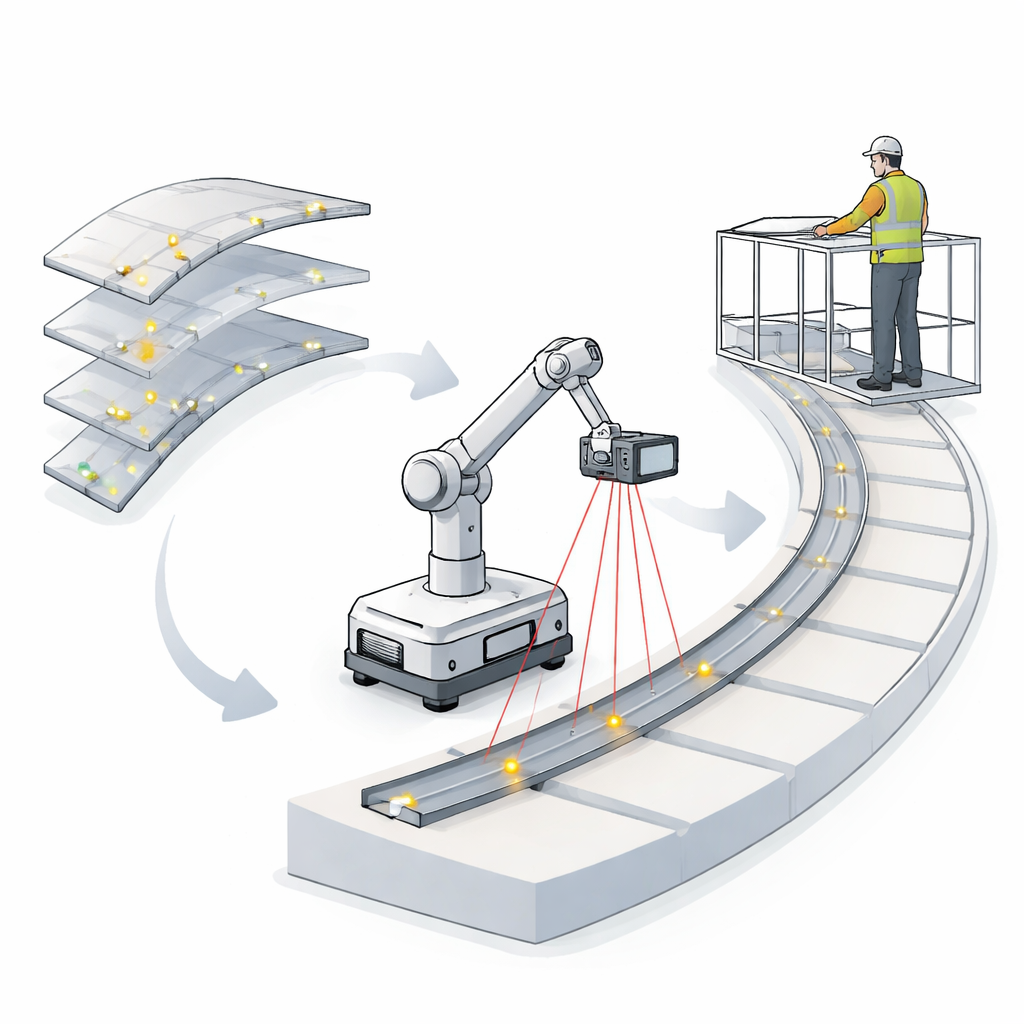
Para mostrar cómo funciona el concepto en la práctica, los investigadores se asociaron con un fabricante líder de aerogeneradores y abordaron un cuello de botella específico: la instalación de docenas de bandejas portacables en un gran bastidor de acero dentro de la góndola. Antes, los operarios tenían que medir a mano a lo largo de una superficie curva, con dificultades de percepción de profundidad que a menudo introducían pequeños errores de colocación que después provocaban que los cables quedaran cortos. El asistente robótico móvil se equipó con una herramienta personalizada impresa en 3D que alberga múltiples unidades láser. Guiado por el gemelo digital, el robot proyecta líneas finas y brillantes sobre el bastidor de acero en los puntos y ángulos exactos donde deben montarse las bandejas. Un trabajador, sobre una plataforma o dentro del bastidor, simplemente alinea cada bandeja con las marcas láser en lugar de medir repetidamente. Las pruebas mostraron que el sistema mantenía los errores de colocación en unos pocos milímetros, eliminó los problemas de longitud de cable en los ensayos y redujo el tiempo de montaje de aproximadamente cuarenta minutos a unos veinticinco minutos por bastidor —una reducción de alrededor de un tercio.
Mantener el control en la muñeca del operario
Puesto que el robot opera cerca de las personas, la forma en que los trabajadores interactúan con él es crucial. El equipo experimentó con varias opciones de control inalámbrico, incluidos mandos portátiles y teléfonos inteligentes, y descubrió que un reloj inteligente funcionaba mejor en el taller. Sus botones sencillos permiten a los operarios iniciar, pausar o mover el robot a la siguiente ubicación sin tener que caminar hasta un panel de control. Tras bambalinas, un pequeño relé inteligente convierte estas pulsaciones en señales para el controlador del robot. Los operadores informaron que los controles del reloj se sentían naturales y convenientes, y que el proceso general parecía más eficiente porque ya no tenían que interrumpir su trabajo para tomar medidas o hacer comprobaciones visuales repetidas. El sistema está diseñado para que el robot pueda reconfigurarse posteriormente —por ejemplo, con un cambiador automático de herramientas— para realizar otras tareas como montaje de pernos cuando no se necesite para las bandejas portacables.
Qué significa esto para la fabricación de energía limpia
El estudio concluye que emparejar a los trabajadores humanos con cobots móviles y sus gemelos digitales puede facilitar la construcción de las máquinas muy grandes necesarias para un futuro de energía limpia. En lugar de buscar reemplazar a las personas, el sistema descarga pasos tediosos y propensos a errores, manteniendo a los humanos al mando mediante interfaces portables y sencillas. Aunque aún quedan desafíos por delante —como añadir movilidad completamente autónoma, mejorar la calibración basada en visión y cumplir normas de seguridad estrictas—, el enfoque demostró ser capaz de mejorar la precisión, reducir el tiempo de mano de obra y ser aceptado por los trabajadores. A medida que las turbinas siguen creciendo y las fábricas buscan maneras de mantener la flexibilidad, los autores sostienen que asistentes robóticos adaptables como este podrían convertirse en una pieza clave para escalar las tecnologías de energía renovable.
Cita: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Palabras clave: fabricación de aerogeneradores, robots colaborativos, gemelo digital, interacción humano-robot, automatización flexible