Clear Sky Science · he
שיתוף פעולה אדפטיבי בין אדם ורובוט בייצור טורבינות רוח באמצעות תאום דיגיטלי
לבנות טורבינות גדולות יותר בעזרת עזרה חכמה יותר
טורבינות רוח נעשות עצומות, כאשר כמה מכללות חוף-ים גבוהות כיום עד כדי התחרות עם גורדי שחקים. הענקים האלה יכולים לספק חשמל זול ונקי, אך הרכבתם נשארת עבודה קשה ומעשית. מאמר זה חוקר כיצד עובדי מפעל יכולים לשתף פעולה עם סוגים חדשים של רובוטים ו"תאומים" וירטואליים כדי להרכיב חלקי טורבינה מרכזיים במהירות רבה יותר, בבטחה רבה יותר ובפחות טעויות יקרות.
מדוע טורבינות ענק זקוקות לסוג חדש של סיוע
טורבינות רוח מודרניות גדלו בגודל ובכוח משום שהתרנים הגדולים קוטפים יותר אנרגיה מהרוח. התוצאה היא חשמל זול יותר וטביעת רגל פחמנית קטנה יותר לאורך חיי כל טורבינה. עם זאת, ייצור המגדלים, הלהבים והנאז'לים העצומים שנמצאים מעליהם נותר ברובו עבודת יד. העובדים צריכים להרים, למדוד ולהרכיב חלקים ארוכים וכבדים סביב משטחים מעוקלים, לעיתים במקומות צפופים או במקומות גבוהים. שינויים תכופים בעיצוב הופכים רובוטים תעשייתיים קבועים לאופציה לקויה, כיוון שמערכות כאלה יקרות לתכנות מחדש ומחייבות פריסות נוקשות. במקביל, מדינות רבות שמייצרות חלקים מורכבים לטורבינות מתמודדות עם כוח עבודה מזדקן וחוסר בעובדים מיומנים, מה שמוסיף לחץ למצוא דרכים חדשות לתמוך בעובדי המפעל.
רובוטים שעובדים לצד בני אדם, לא במקום אותם
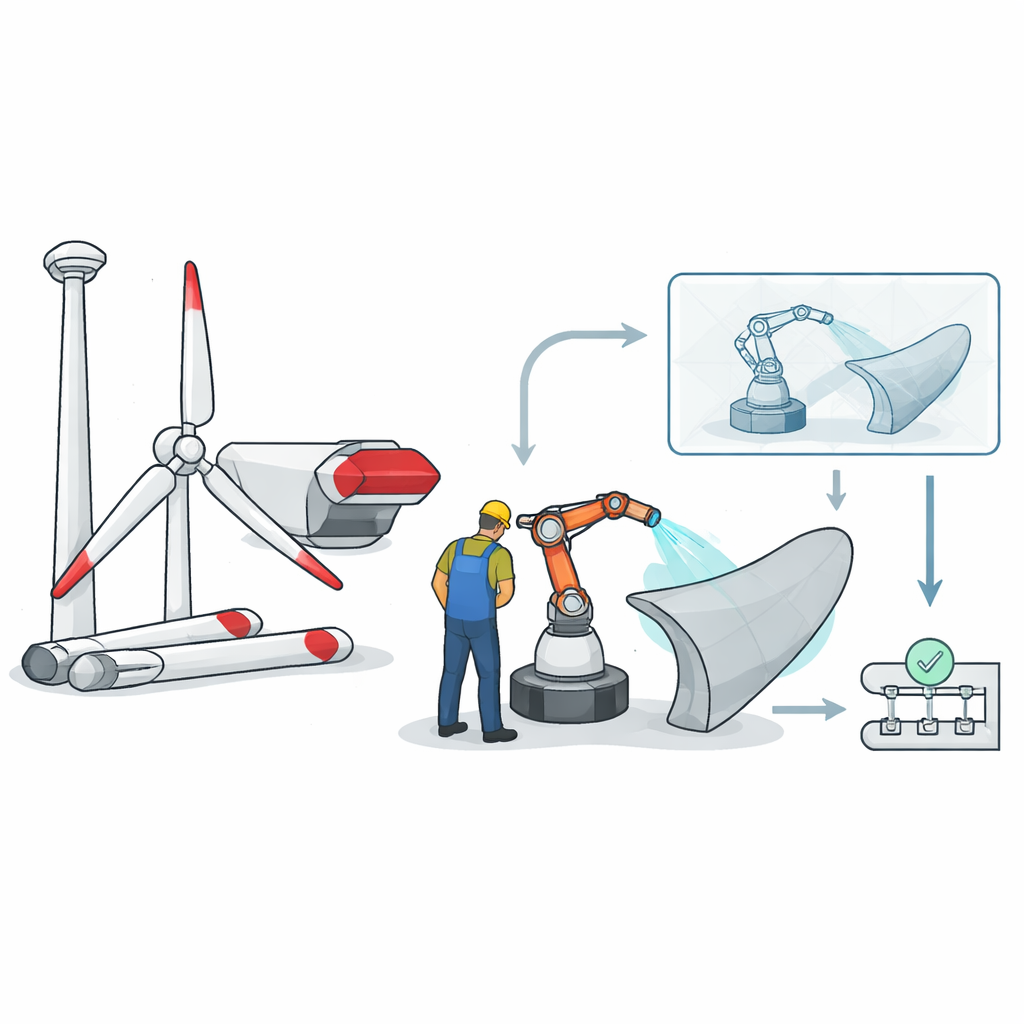
המחברים מתמקדים במחלקת מכונות הנקראות רובוטים שיתופיים, או קובוטים, שנועדו לחלוק מרחב עם אנשים במקום לשבת מאחורי גדרות בטיחות. בשונה מרובוטים מסורתיים שנבנו למשימה צרה אחת, העוזר הנייד המוצע משלב זרוע רובוטית קטנה עם בסיס גלגלי כדי שיוכל לנוע בין תחנות. העוזר נועד לטפל בעבודות חזרתיות ודיוק בעוד שבני אדם מבצעים משימות שדורשות שיפוט כמו בדיקה ופתרון בעיות. כדי להפוך את המערכת לגמישה במקום למטרת שימוש יחידה, הצוות תכנן אותה סביב חומרה מודולרית — כלים שניתן להחליף על פרק היד של הרובוט — ותוכנה גמישה הניתנת להתאמה למוצרים ומשימות חדשות. רעיון מרכזי הוא שבני אדם נשארים אחראים, כשהרובוט פועל כמו עוזר מיומן שניתן להקצותו מחדש היכן שהוא נדרש ביותר.
שימוש בתאום וירטואלי לתכנון ולהנחיית הרובוט
חידוש מרכזי בעבודה זו הוא השימוש בתאום דיגיטלי: העתק וירטואלי ברזולוציה גבוהה של הרובוט, הכלים שלו וחלקי הטורבינה שהוא ירכיב. מהנדסים מייבאים עיצובים של טורבינה מקבצי CAD לתוכנת סימולציה ומתכנתים את הרובוט להגיע לנקודות ספציפיות על אותם חלקים. בעולם הווירטואלי הזה הם יכולים לבדוק האם הזרוע יכולה להגיע לכל מיקום, לכוון מסלולים להימנע מתנגשות, ולהעריך כמה זמן יידרש לכל משימה — כל זאת לפני בנייה או הקונפיגורציה של ציוד פיזי. התאום הדיגיטלי נשאר מחובר לרובוט האמיתי בזמן הפעולה, מה שמאפשר החלפה של מיקומים ותנועות הלוך ושוב. הקשר הזה מקל על כוונון המערכת, תיקון הסטים כמו הבדלים קטנים באיפה שמכוון הלייזר, ועדכון תוכניות במהירות כשעיצובים של טורבינות משתנים.
ניסוי במפעל אמיתי במשימת הרכבה מורכבת
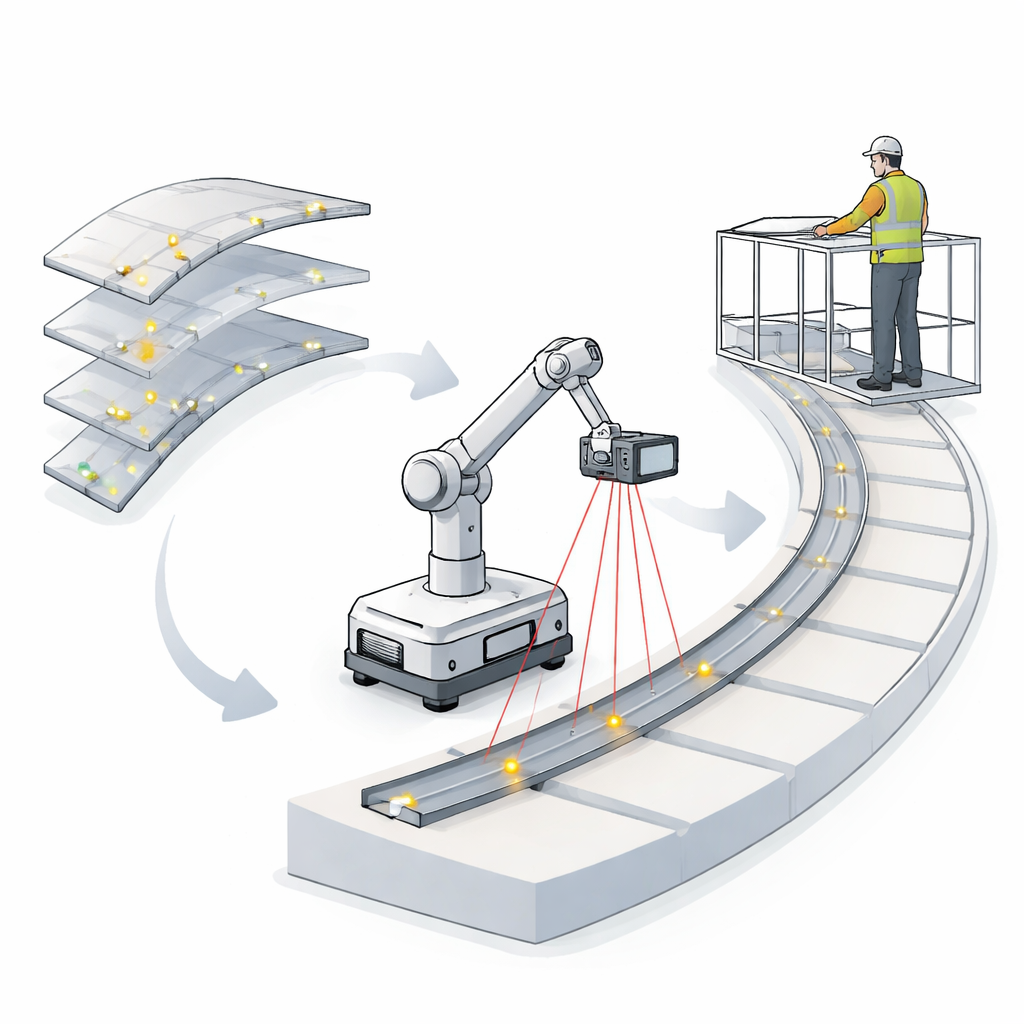
כדי להדגים כיצד המושג עובד בפועל, החוקרים שיתפו פעולה עם יצרן מוביל של טורבינות רוח וטיפלו בצוואר בקבוק ספציפי: התקנת עשרות תעלות כבלים על מסגרת פלדה גדולה בתוך נאז'ל הטורבינה. בעבר העובדים נאלצו למדוד ביד לאורך משטח מעוקל, התקשו בהערכת עומק ולעיתים הכניסו שגיאות מיקום קטנות שגרמו מאוחר יותר לכבלים להיות קצרים מדי. העוזר הנייד הוצמד אליו כלי מותאם שהודפס בתלת־ממד שאוחז מספר יחידות לייזר. בהנחיית התאום הדיגיטלי, הרובוט מקרין קווים דקים ובהירים על מסגרת הפלדה בנקודות ובזוויות המדויקות שבהן יש להרכיב את התעלות. העובד, העומד על פלטפורמה או בתוך המסגרת, פשוט מיישר כל תעלה עם סימוני הלייזר במקום למדוד שוב ושוב. הניסויים הראו שהמערכת יכולה לשמור על שגיאות מיקום בסדר גודל של כמה מילימטרים, ביטלה בעיות אורכי כבלים בניסויים וקיצרה את זמן ההרכבה מכ־40 דקות לכ־25 דקות לכל מסגרת — צמצום של בערך שליש.
שמירה על שליטה בפרק היד של העובד
מכיוון שהרובוט פועל בסמוך לאנשים, הדרך שבה העובדים מתקשרים איתו חיונית. הצוות ניסה מספר אפשרויות שליטה אלחוטיות, כולל שלטים נישאים וסמארטפונים, ומצא ששעון חכם עבד הכי טוב על רצפת המפעל. הכפתורים הפשוטים שלו מאפשרים למפעילים להתחיל, להשהות או להזיז את הרובוט למיקום הבא בלי ללכת עד ללוח בקרה. מאחורי הקלעים ממיר ריליי חכם קטן את לחיצות הכפתורים לאותות לבקר הרובוט. המפעילים דיווחו כי שליטת השעון החכם הרגישה טבעית ונוחה, והתהליך הכולל ניכר כיעיל יותר משום שלא נאלצו לעצור עבודה כדי לבצע מדידות או בדיקות ויזואליות חוזרות. המערכת מתוכננת כך שניתן יהיה להקנפגה מחדש לרובוט בעתיד — עם מחליף כלי אוטומטי, לדוגמה — כדי לבצע משימות אחרות כגון הרכבת ברגים כאשר אינו נדרש לתעלות כבלים.
מה משמעות הדבר עבור ייצור אנרגיה נקייה
המחקר מסכם כי שילוב עובדי אדם עם קובוטים ניידים ותאומים דיגיטליים שלהם יכול להקל על בניית המכונות הגדולות הנחוצות לעתיד אנרגיה נקייה. במקום לשאוף להחליף אנשים, המערכת מעבירה שלבים מייגעים ורגישים לשגיאות, תוך שמירה על בני אדם כמי ששולטים דרך ממשקי לבישים פשוטים. אף שיש עדיין אתגרים לפנינו — כגון הוספת ניידות אוטונומית מלאה, שיפור כיוונון מבוסס ראייה ועמידה בתקנות בטיחות מחמירות — הגישה הוכיחה יכולת לשפר דיוק, לקצר זמן עבודה ולהיות מתקבלת על ידי העובדים. ככל שהטורבינות ממשיכות לגדול והמפעלים מחפשים דרכים להישאר גמישים, המחברים טוענים שעוזרים רובוטיים אדפטיביים כאלה עלולים להפוך לחלק מרכזי בפאזל של הגדלת טכנולוגיות אנרגיה מתחדשת.
ציטוט: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
מילות מפתח: ייצור טורבינות רוח, רובוטים שיתופיים, תאום דיגיטלי, אינטראקציה בין אדם לרובוט, אוטומציה גמישה