Clear Sky Science · de
Adaptive Zusammenarbeit von Mensch und Roboter in der Windturbinenfertigung mithilfe digitaler Zwillinge
Größere Turbinen bauen mit schlauerer Hilfe
Windturbinen werden riesig, einige Offshore-Anlagen sind inzwischen so hoch, dass sie mit Wolkenkratzern konkurrieren könnten. Diese Giganten liefern billigen, sauberen Strom, doch die Montage bleibt oft harte Handarbeit. Dieser Artikel untersucht, wie Fabrikarbeiter mit neuen Roboterarten und deren virtuellen „Zwillingen“ zusammenarbeiten können, um zentrale Turbinenteile schneller, sicherer und mit weniger kostspieligen Fehlern zu montieren.
Warum riesige Turbinen eine neue Form von Unterstützung brauchen
Moderne Windturbinen sind in Größe und Leistung gewachsen, weil größere Rotoren mehr Energie aus dem Wind einfangen. Das Ergebnis sind günstigere Stromkosten und ein geringerer CO2-Fußabdruck über die Lebensdauer jeder Turbine. Die Herstellung der riesigen Türme, Rotorblätter und Gondeln bleibt jedoch größtenteils manuell. Arbeitende müssen lange, schwere Bauteile heben, vermessen und an gebogenen Flächen montieren, oft in beengten oder erhöhten Bereichen. Häufige Designänderungen machen traditionelle, fest installierte Industrieroboter unpraktisch, da diese Systeme teuer umzuprogrammieren sind und Hersteller in starre Produktionslayouts zwingen. Zugleich haben viele Länder, die komplexe Turbinenteile fertigen, eine alternde Belegschaft und einen Mangel an qualifizierten Arbeitskräften, was den Druck erhöht, neue Wege zur Unterstützung der Menschen auf dem Werkstattboden zu finden.
Roboter, die neben Menschen arbeiten, nicht an ihrer Stelle
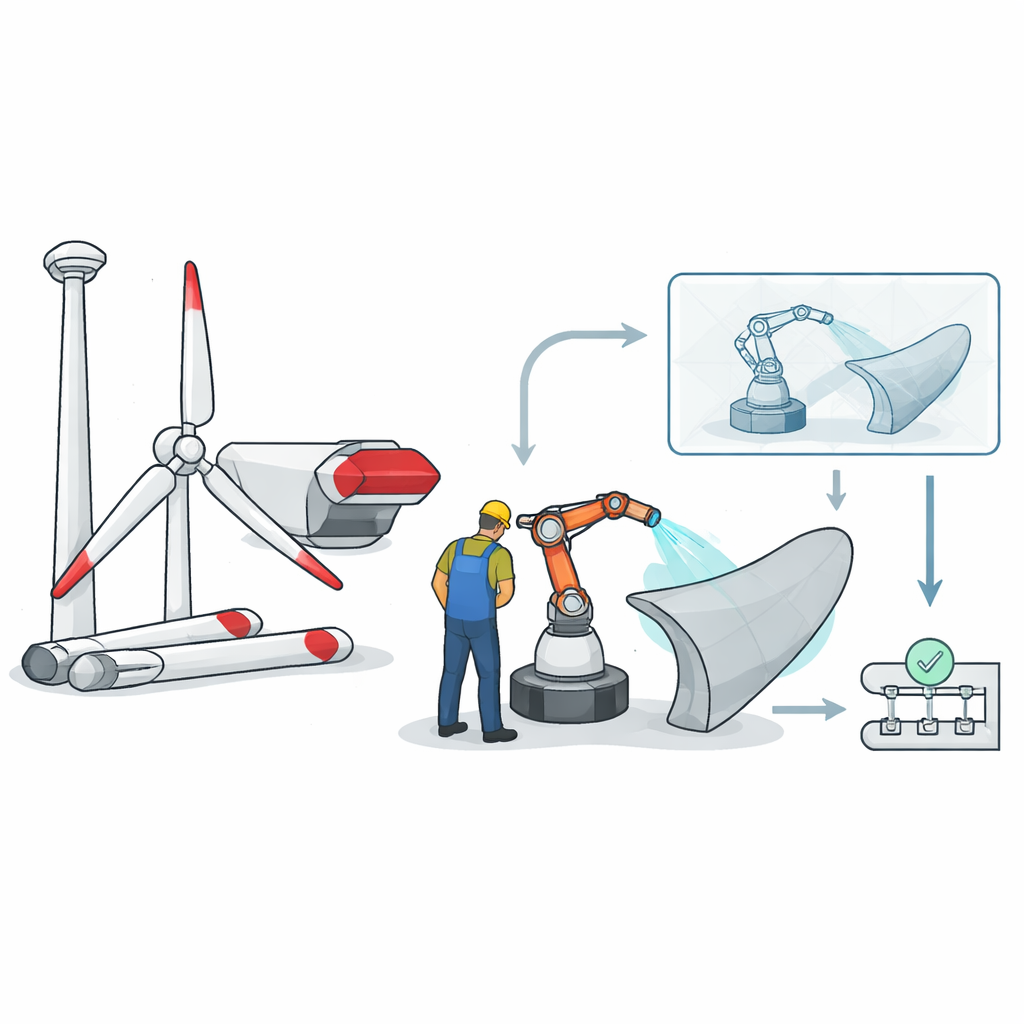
Die Autoren konzentrieren sich auf eine Klasse von Maschinen, die als kollaborative Roboter oder Cobots bezeichnet werden und dafür ausgelegt sind, Raum mit Menschen zu teilen, statt hinter Schutzzäunen zu stehen. Anders als traditionelle Roboter, die für eine enge Aufgabe gebaut sind, kombiniert der vorgeschlagene mobile Roboterassistent einen kleinen Roboterarm mit einer rollenden Basis, sodass er zwischen Stationen fahren kann. Der Assistent soll repetitive, präzise Arbeiten übernehmen, während Menschen Beurteilungsaufgaben wie Inspektion und Problemlösung ausführen. Um das System anpassungsfähig statt zweckgebunden zu machen, entwarf das Team es mit modularer Hardware—Werkzeugen, die am Handgelenk des Roboters ausgetauscht werden können—und flexibler Software, die für neue Produkte und Aufgaben umkonfiguriert werden kann. Ein zentrales Prinzip ist, dass Menschen die Kontrolle behalten und der Roboter wie ein fachkundiger Helfer agiert, der dort eingesetzt werden kann, wo er am meisten gebraucht wird.
Einen virtuellen Zwilling zum Entwerfen und Steuern des Roboters nutzen
Eine Schlüsselinnovation dieser Arbeit ist der Einsatz eines digitalen Zwillings: eine hochauflösende virtuelle Kopie des Roboters, seiner Werkzeuge und der Turbinenteile, die er montieren wird. Ingenieure importieren Turbinendesigns aus CAD-Dateien in Simulationssoftware und programmieren den Roboter so, dass er bestimmte Punkte an diesen Teilen anfahren kann. In dieser virtuellen Welt können sie testen, ob der Arm jede Position erreichen kann, seine Bahnen anpassen, um Kollisionen zu vermeiden, und abschätzen, wie lange Aufgaben dauern, noch bevor physische Ausrüstung gebaut oder umkonfiguriert wird. Der digitale Zwilling bleibt während des Betriebs mit dem realen Roboter verbunden, sodass Positionen und Bewegungen hin- und hergetauscht werden können. Diese Verbindung erleichtert das Feintuning des Systems, das Korrigieren von Versätzen wie kleinen Abweichungen im Laserziel und das schnelle Aktualisieren von Programmen, wenn sich Turbinendesigns ändern.
Ein echter Fabriktest bei einer kniffligen Montageaufgabe
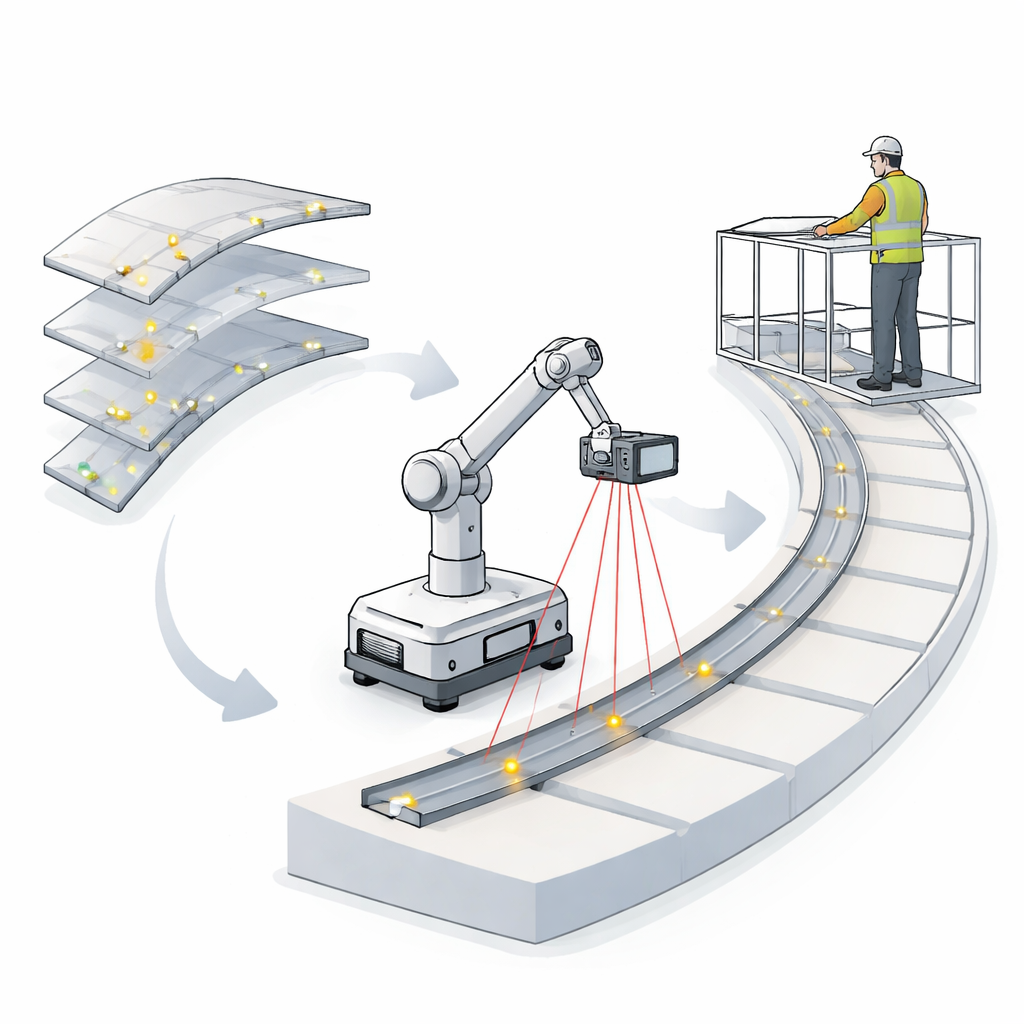
Um zu zeigen, wie das Konzept in der Praxis funktioniert, kooperierten die Forschenden mit einem führenden Windturbinenhersteller und gingen ein konkretes Nadelöhr an: die Montage dutzender Kabeltrassen an einem großen Stahlrahmen im Inneren der Gondel. Bisher mussten Arbeitende entlang einer gekrümmten Fläche von Hand messen, hatten Probleme mit der Tiefenwahrnehmung und führten oft kleine Platzierungsfehler ein, die später zu zu kurzen Kabeln führten. Der mobile Roboterassistent wurde mit einem maßgeschneiderten, 3D-gedruckten Werkzeug ausgestattet, das mehrere Lasereinheiten trägt. Geleitet vom digitalen Zwilling projiziert der Roboter dünne, helle Linien auf den Stahlrahmen an den exakten Stellen und Winkeln, an denen Trassen montiert werden müssen. Ein Arbeiter auf einer Plattform oder im Rahmen richtet jede Trasse einfach an den Laser-Markierungen aus, statt wiederholt zu messen. Tests zeigten, dass das System Platzierungsfehler auf wenige Millimeter begrenzen konnte, Kabel-Längenprobleme in den Versuchen beseitigte und die Montagezeit pro Rahmen von etwa vierzig auf rund fünfundzwanzig Minuten verkürzte—eine Reduktion um ungefähr ein Drittel.
Die Kontrolle am Handgelenk des Arbeitenden behalten
Weil der Roboter in der Nähe von Menschen arbeitet, ist die Art der Interaktion entscheidend. Das Team experimentierte mit verschiedenen drahtlosen Steueroptionen, darunter Handfernbedienungen und Smartphones, und stellte fest, dass eine Smartwatch auf dem Werkstattboden am besten funktionierte. Ihre einfachen Tasten ermöglichen es Bedienern, den Roboter zu starten, zu pausieren oder zur nächsten Position zu bewegen, ohne zu einem Bedienfeld laufen zu müssen. Im Hintergrund wandelt ein kleines Smart-Relais diese Tastendrücke in Signale für die Robotersteuerung um. Bediener berichteten, dass sich die Smartwatch-Steuerung natürlich und praktisch anfühlte, und der gesamte Ablauf wirkte effizienter, weil sie nicht mehr bei der Arbeit stoppen mussten, um Messungen durchzuführen oder wiederholt Sichtprüfungen vorzunehmen. Das System ist so ausgelegt, dass der Roboter später umkonfiguriert werden kann—beispielsweise mit einem automatischen Werkzeugwechsler—um andere Aufgaben wie Schraubenmontage zu übernehmen, wenn er für Kabeltrassen nicht benötigt wird.
Was das für die Fertigung sauberer Energie bedeutet
Die Studie kommt zu dem Schluss, dass die Kombination aus menschlichen Arbeitern, mobilen Cobots und ihren digitalen Zwillingen das Bauen der für eine saubere Energiezukunft nötigen sehr großen Maschinen erleichtern kann. Anstatt zu versuchen, Menschen zu ersetzen, entlastet das System von mühsamen und fehleranfälligen Schritten, während Menschen durch einfache tragbare Schnittstellen die Kontrolle behalten. Auch wenn weiterhin Herausforderungen bleiben—etwa vollständige autonome Mobilität, Verbesserungen bei visionbasierter Kalibrierung und die Einhaltung strenger Sicherheitsvorschriften—zeigte der Ansatz, dass er Genauigkeit verbessern, Arbeitszeit reduzieren und von den Arbeitern angenommen werden kann. Da Turbinen weiter wachsen und Fabriken nach Flexibilität streben, argumentieren die Autoren, dass anpassungsfähige Roboterassistenten wie dieser zu einem Schlüsselelement beim Hochskalieren erneuerbarer Energietechnologien werden könnten.
Zitation: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Schlüsselwörter: Fertigung von Windturbinen, kollaborative Roboter, digitaler Zwilling, Mensch-Roboter-Interaktion, flexible Automatisierung