Clear Sky Science · sv
Adaptivt samarbete mellan människa och robot vid tillverkning av vindkraftverk med hjälp av digitala tvillingar
Bygga större turbiner med smartare hjälp
Vindkraftverk blir enorma; vissa offshore-maskiner är nu så höga att de kan mäta sig med skyskrapor. Dessa jättar kan leverera billig, ren elektricitet, men att montera dem är fortfarande ett krävande, manuellt arbete. Den här artikeln undersöker hur fabriksarbetare kan samarbeta med nya typer av robotar och deras virtuella ”tvillingar” för att montera viktiga turbindelar snabbare, säkrare och med färre kostsamma misstag.
Varför jätteturbiner kräver en ny sorts hjälp
Moderna vindkraftverk har ökat i storlek och effekt eftersom större rotorer fångar mer energi från vinden. Resultatet är billigare el och en mindre koldioxidbelastning under varje turbines livslängd. Ändå är tillverkningen av de enorma tornen, bladen och nacellerna som sitter ovanpå till stor del manuellt arbete. Arbetare måste lyfta, mäta och montera långa, tunga komponenter runt krökta ytor, ofta i trånga eller upphöjda utrymmen. Frekventa designförändringar gör traditionella, fasta industrirobotar mindre lämpliga eftersom sådana system är dyra att omprogrammera och låser tillverkarna i stela layouter. Samtidigt står många länder som bygger komplexa turbindelar inför en åldrande arbetsstyrka och brist på kvalificerad arbetskraft, vilket ökar pressen att hitta nya sätt att stödja människor på fabriksgolvet.
Robotar som arbetar bredvid människor, inte i deras ställe
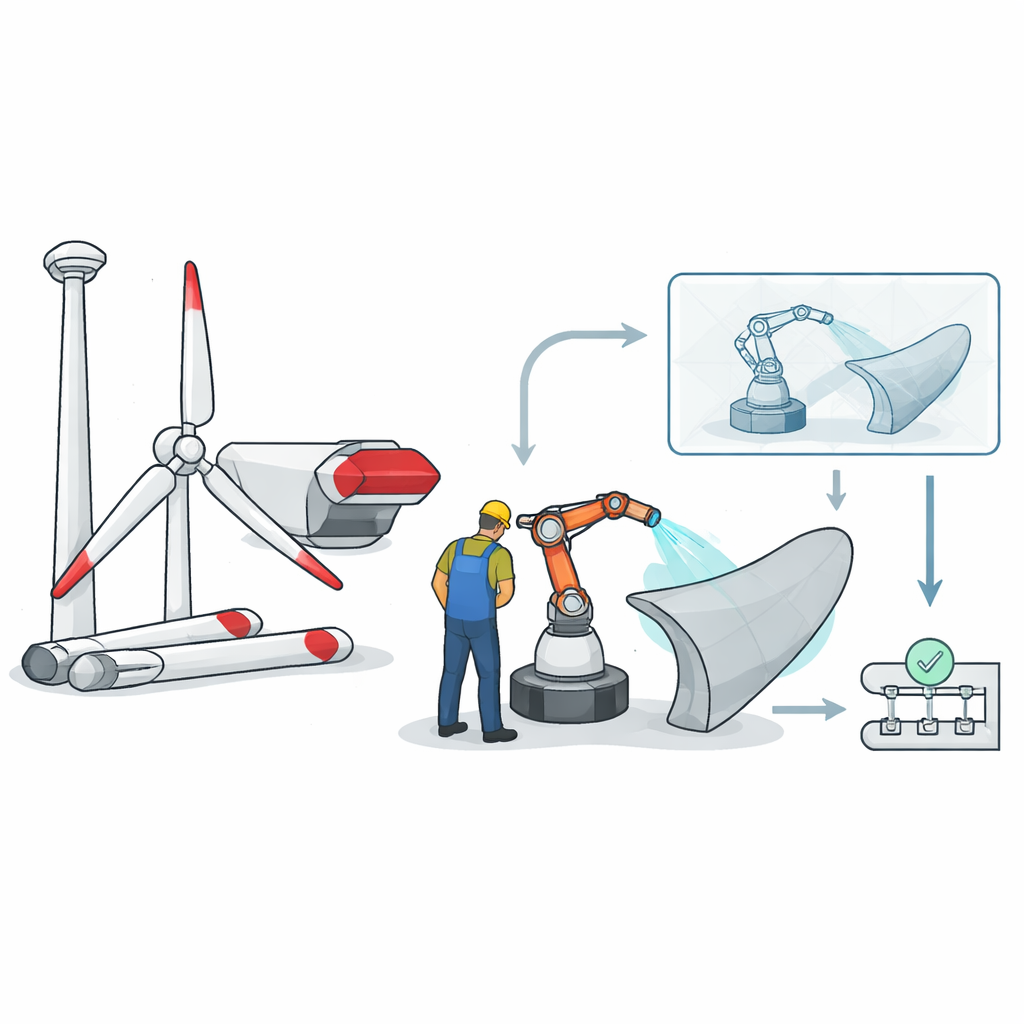
Författarna fokuserar på en klass maskiner kallade kolaborativa robotar, eller cobots, utformade för att dela utrymme med människor snarare än att stå bakom säkerhetsstängsel. Till skillnad från traditionella robotar byggda för en snäv uppgift kombinerar den föreslagna mobila robotassistenten en liten robotarm med en hjulbas så att den kan förflytta sig mellan arbetsstationer. Assistenten är avsedd att hantera repetitivt, precisionskrävande arbete medan människor utför bedömningsintensiva uppgifter som inspektion och problemlösning. För att göra systemet anpassningsbart istället för ändamålsbundet har teamet utformat det kring modulär hårdvara—verktyg som kan bytas vid robotens handled—och flexibel programvara som kan omkonfigureras för nya produkter och uppgifter. En central idé är att människan förblir ansvarig, medan roboten fungerar som en skicklig hjälpare som kan omplaceras dit den behövs mest.
Använda en virtuell tvilling för att konstruera och styra roboten
En nyckelinnovation i detta arbete är användningen av en digital tvilling: en högupplöst virtuell kopia av roboten, dess verktyg och de turbindelar den ska montera. Ingenjörer importerar turbindesigner från CAD-filer till simuleringsprogram och programmerar roboten att nå specifika punkter på dessa delar. I denna virtuella värld kan de testa om armen kan nå varje position, justera dess banor för att undvika kollisioner och uppskatta hur lång tid uppgifter kommer att ta—allt innan man bygger eller omkonfigurerar fysisk utrustning. Den digitala tvillingen förblir kopplad till den verkliga roboten under drift, vilket tillåter att positioner och rörelser utbyts fram och tillbaka. Denna förbindelse gör det enklare att finjustera systemet, korrigera offsetar som små skillnader i var en laser pekar, och uppdatera program snabbt när turbindesigner ändras.
Ett verkligt fabriksprov på en knepig monteringsuppgift
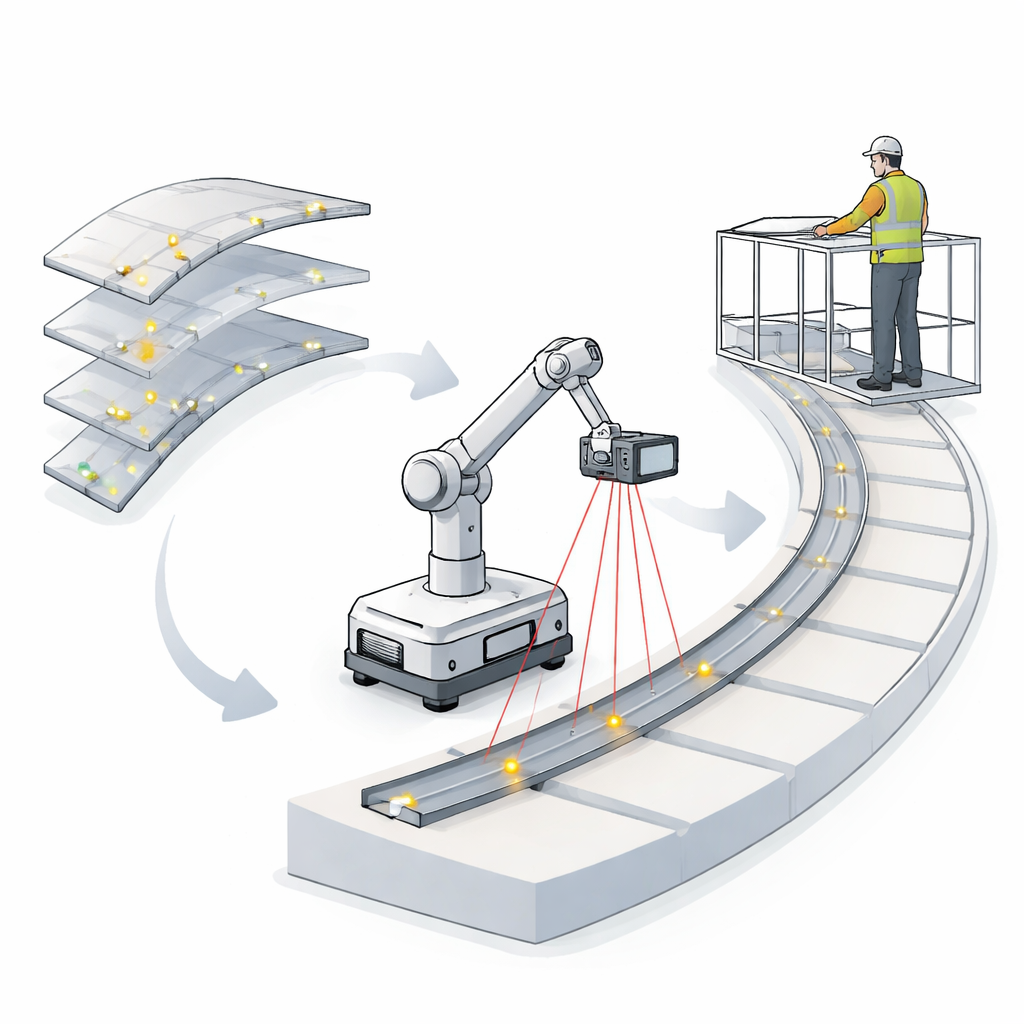
För att visa hur konceptet fungerar i praktiken samarbetade forskarna med en ledande tillverkare av vindkraftverk och tog sig an en specifik flaskhals: installation av dussintals kabelstegar på en stor stålram inne i turbinens nacelle. Tidigare var arbetarna tvungna att mäta för hand längs en krökt yta, vilket gav svårigheter med djupuppfattning och ofta introducerade små placeringsfel som senare gjorde att kablar blev för korta. Den mobila robotassistenten utrustades med ett specialtillverkat, 3D-printat verktyg som rymmer flera laserenheter. Guidad av den digitala tvillingen projicerar roboten tunna, ljusstarka linjer på stålramen vid de exakta punkter och vinklar där stegarna ska monteras. En arbetare, stående på en plattform eller inne i ramen, behöver bara rikta varje steg efter laserstrecken istället för att mäta upprepade gånger. Tester visade att systemet kunde hålla placeringsfel inom några millimeter, eliminerade problem med kabelängder i försöken och minskade monteringstiden från ungefär fyrtio minuter till omkring tjugofem minuter per ram—en minskning på cirka en tredjedel.
Behålla kontrollen vid arbetarnas handled
Eftersom roboten arbetar nära människor är sättet arbetare interagerar med den avgörande. Teamet experimenterade med flera trådlösa styralternativ, inklusive handhållna fjärrkontroller och smartphones, och fann att en smartklocka fungerade bäst på verkstadsgolvet. Dess enkla knappar låter operatörerna starta, pausa eller flytta roboten till nästa position utan att behöva gå till en kontrollpanel. I bakgrunden omvandlar ett litet smart relä dessa knapptryckningar till signaler för robotens styrenhet. Operatörerna rapporterade att smartklockans kontroller kändes naturliga och bekväma, och att hela processen verkade mer effektiv eftersom de inte längre behövde avbryta arbetet för att ta mätningar eller göra upprepade visuella kontroller. Systemet är utformat så att roboten senare kan omkonfigureras—till exempel med en automatisk verktygsväxlare—för att utföra andra uppgifter som bultmontering när den inte behövs för kabelstegar.
Vad detta betyder för tillverkning av ren energi
Studien slutar i att en sammansättning av mänskliga arbetare med mobila cobots och deras digitala tvillingar kan göra det enklare att bygga de mycket stora maskiner som krävs för en framtid med ren energi. Istället för att sträva efter att ersätta människor avlastar systemet tråkiga och felbenägna moment, samtidigt som människor behåller kontrollen via enkla bärbara gränssnitt. Trots att det återstår utmaningar—såsom att lägga till full autonom mobilitet, förbättra visionsbaserad kalibrering och uppfylla strikta säkerhetsregler—visade tillvägagångssättet att det kan förbättra noggrannheten, minska arbetstiden och accepteras av arbetarna. När turbinerna fortsätter att växa och fabriker söker sätt att förbli flexibla hävdar författarna att anpassningsbara robotassistenter som denna kan bli en nyckelkomponent i att skala upp förnybar energiteknik.
Citering: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Nyckelord: tillverkning av vindkraftverk, kolaborativa robotar, digital tvilling, människa–robot-interaktion, flexibel automation