Clear Sky Science · pl
Adaptacyjna współpraca człowieka z robotem w produkcji turbin wiatrowych z wykorzystaniem cyfrowych bliźniaków
Budowanie większych turbin przy pomocy inteligentniejszego wsparcia
Turbiny wiatrowe stają się ogromne — niektóre maszyny morskie są już wysokie niczym wieżowce. Te giganty mogą dostarczać tanią, czystą energię, ale ich montaż wciąż wymaga ciężkiej, manualnej pracy. W artykule opisano, jak pracownicy fabryk mogą współpracować z nowymi typami robotów i ich wirtualnymi „bliźniakami”, aby szybciej, bezpieczniej i przy mniejszej liczbie kosztownych błędów montować kluczowe części turbin.
Dlaczego gigantyczne turbiny potrzebują nowego rodzaju wsparcia
Nowoczesne turbiny wiatrowe rosną zarówno pod względem rozmiaru, jak i mocy, ponieważ większe wirniki przechwytują więcej energii z wiatru. Efektem jest tańsza energia i mniejszy ślad węglowy w cyklu życia każdej turbiny. Jednak wytwarzanie ogromnych wież, łopat i gondoli pozostaje w dużej mierze procesem ręcznym. Pracownicy muszą podnosić, mierzyć i montować długie, ciężkie elementy wokół zaokrąglonych powierzchni, często w ciasnych lub podwyższonych miejscach. Częste zmiany projektowe sprawiają, że tradycyjne, stałe roboty przemysłowe są niepraktyczne — ich ponowne zaprogramowanie jest kosztowne, a stałe instalacje narzucają producentom sztywne układy pracy. Równocześnie wiele krajów produkujących skomplikowane części do turbin mierzy się ze starzejącą się siłą roboczą i niedoborem wykwalifikowanych pracowników, co zwiększa presję na poszukiwanie nowych sposobów wsparcia ludzi na hali produkcyjnej.
Roboty, które pracują obok ludzi, a nie zamiast nich
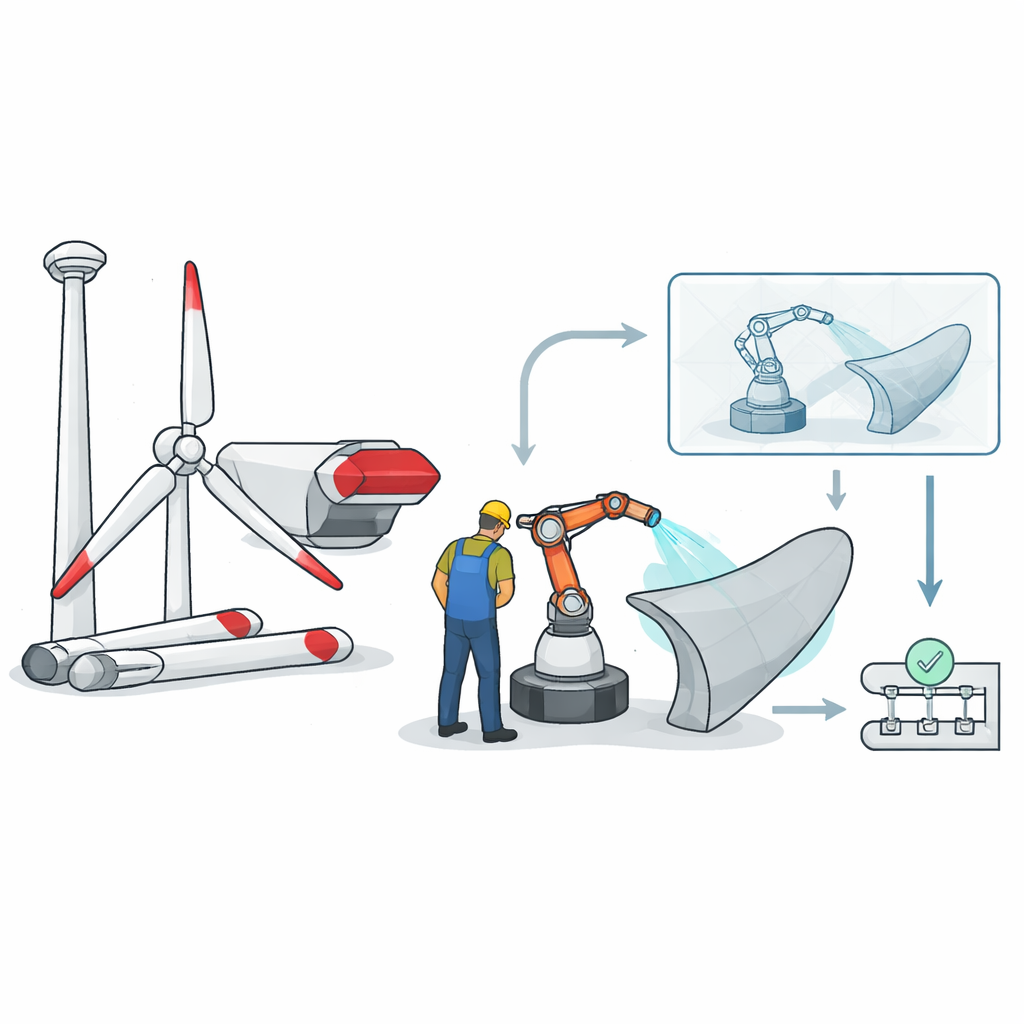
Autorzy skupiają się na klasie maszyn zwanych robotami współpracującymi, czyli cobotami, zaprojektowanych do dzielenia przestrzeni z ludźmi zamiast przebywać za ogrodzeniami bezpieczeństwa. W odróżnieniu od tradycyjnych robotów przeznaczonych do jednego wąskiego zadania, proponowany mobilny asystent łączy niewielkie ramię robotyczne z podwoziem na kółkach, dzięki czemu może przemieszczać się między stanowiskami. Asystent ma zajmować się powtarzalnymi, precyzyjnymi pracami, podczas gdy ludzie wykonują zadania wymagające oceny i rozwiązywania problemów. Aby system był adaptowalny, a nie jednofunkcyjny, zespół zaprojektował go wokół modułowego sprzętu — narzędzi wymienianych na nadgarstku robota — oraz elastycznego oprogramowania, które można rekonfigurować dla nowych produktów i zadań. Centralna idea polega na tym, że to ludzie zachowują kontrolę, a robot działa jak wykwalifikowany pomocnik, którego można przydzielać tam, gdzie jest najbardziej potrzebny.
Wykorzystanie wirtualnego bliźniaka do projektowania i sterowania robota
Kluczową innowacją w tej pracy jest użycie cyfrowego bliźniaka: wiernej wirtualnej kopii robota, jego narzędzi oraz elementów turbiny, które będzie montował. Inżynierowie importują projekty turbin z plików CAD do oprogramowania symulacyjnego i programują robota tak, aby sięgał określonych punktów na tych częściach. W tym wirtualnym świecie mogą sprawdzić, czy ramię dosięga wszystkich miejsc, dostosować ścieżki, by unikać kolizji, oraz oszacować czas trwania zadań — wszystko zanim zbudują lub rekonfigurują sprzęt fizyczny. Cyfrowy bliźniak pozostaje połączony z rzeczywistym robotem podczas pracy, co pozwala na dwukierunkową wymianę pozycji i ruchów. To połączenie ułatwia dopracowywanie systemu, korektę odchyłek, takich jak niewielkie różnice w ustawieniu lasera, oraz szybkie aktualizacje programów, gdy zmieniają się projekty turbin.
Próba w rzeczywistej fabryce przy trudnym zadaniu montażowym
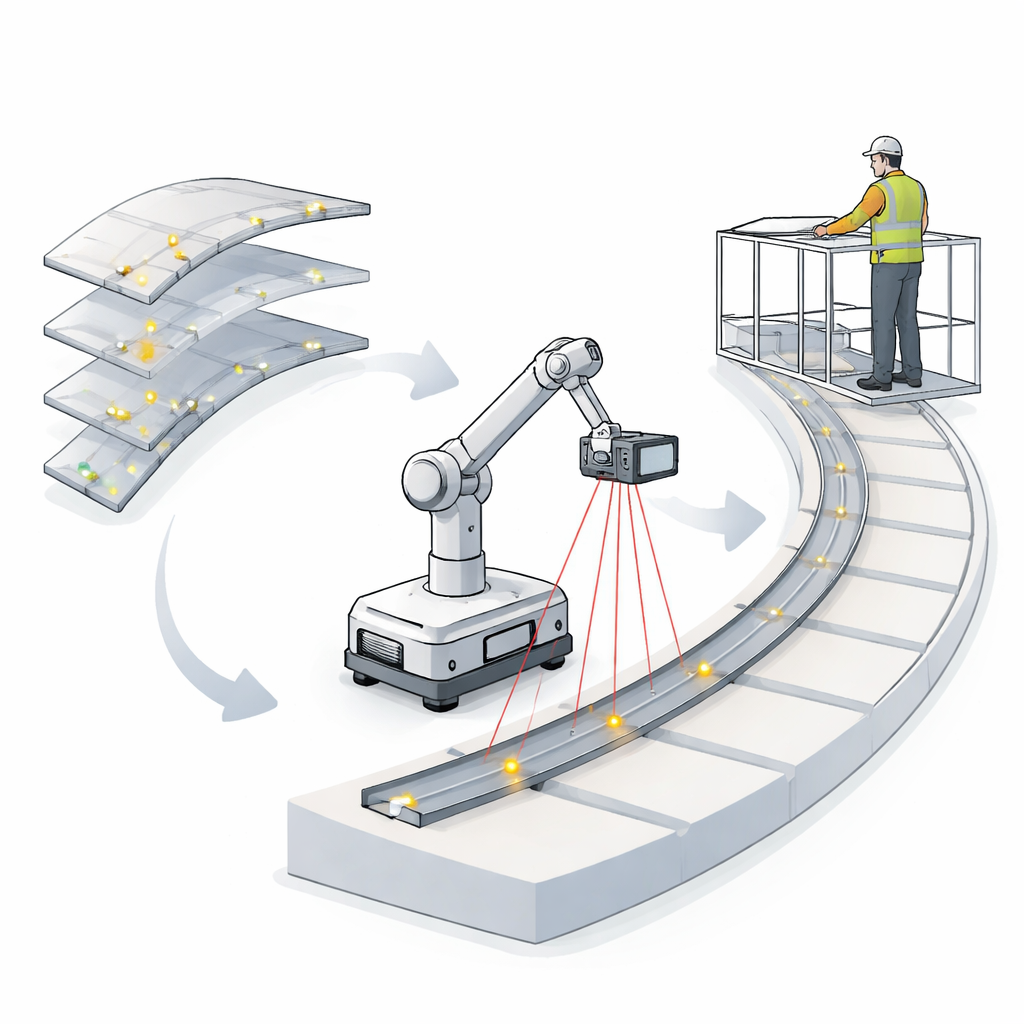
Aby pokazać działanie koncepcji w praktyce, badacze nawiązali współpracę z wiodącym producentem turbin i zajęli się konkretnym wąskim gardłem: montażem kilkudziesięciu korytek kablowych na dużej stalowej ramie wewnątrz gondoli turbiny. Wcześniej pracownicy musieli mierzyć ręcznie po zakrzywionej powierzchni, co utrudniało ocenę głębi i często powodowało drobne błędy w pozycjonowaniu, skutkujące później zbyt krótkimi przewodami. Mobilny asystent robotyczny został wyposażony w niestandardowe, drukowane 3D narzędzie mieszczące kilka jednostek laserowych. Kierowany przez cyfrowego bliźniaka robot rysuje cienkie, jasne linie na stalowej ramie dokładnie w miejscach i pod kątem, gdzie korytka mają być montowane. Pracownik stojący na platformie lub wewnątrz ramy wyrównuje każde korytko względem oznaczeń laserowych zamiast mierzyć wielokrotnie. Testy wykazały, że system utrzymywał błędy pozycjonowania w granicach kilku milimetrów, wyeliminował problemy z długością kabli w próbnych montażach i skrócił czas montażu z około czterdziestu minut do około dwudziestu pięciu minut na ramę — redukcja o około jedną trzecią.
Utrzymanie kontroli przy nadgarstku pracownika
Ponieważ robot działa blisko ludzi, sposób, w jaki pracownicy wchodzą z nim w interakcje, jest kluczowy. Zespół eksperymentował z kilkoma bezprzewodowymi opcjami sterowania, w tym pilotami ręcznymi i smartfonami, i stwierdził, że najlepiej na hali sprawdza się smartwatch. Proste przyciski pozwalają operatorom rozpocząć, wstrzymać lub przesunąć robota do następnej pozycji bez konieczności podejścia do panelu sterowania. W tle małe inteligentne przekaźniki zamieniają naciśnięcia przycisków na sygnały do kontrolera robota. Operatorzy raportowali, że sterowanie przez smartwatch wydawało się naturalne i wygodne, a cały proces był bardziej efektywny, ponieważ nie musieli przerywać pracy, by wykonywać pomiary lub wielokrotne kontrole wzrokowe. System zaprojektowano tak, aby robot mógł być później rekonfigurowany — na przykład z automatyczną wymianą narzędzi — by wykonywać inne zadania, takie jak montaż śrub, gdy nie jest potrzebny przy korytkach kablowych.
Co to oznacza dla produkcji czystej energii
Badanie konkluduje, że parowanie pracowników z mobilnymi cobotami i ich cyfrowymi bliźniakami może ułatwić budowę bardzo dużych maszyn potrzebnych dla przyszłości opartej na czystej energii. Zamiast dążyć do zastąpienia ludzi, system odciąża żmudne i podatne na błędy etapy pracy, pozostawiając kontrolę człowiekowi poprzez proste interfejsy noszone. Chociaż przed nami nadal stoją wyzwania — takie jak pełna autonomiczna mobilność, ulepszenie kalibracji opartej na widzeniu maszynowym oraz spełnienie surowych przepisów bezpieczeństwa — podejście dowiodło zdolności do poprawy dokładności, skrócenia czasu pracy i akceptacji przez pracowników. W miarę jak turbiny będą rosły, a fabryki będą szukać sposobów na zachowanie elastyczności, autorzy sugerują, że adaptowalne asystenty robotyczne tego typu mogą stać się kluczowym elementem w skalowaniu technologii odnawialnych źródeł energii.
Cytowanie: Malik, A.A., Masood, T. Adaptive human–robot collaboration in wind turbine manufacturing using digital twins. Sci Rep 16, 11205 (2026). https://doi.org/10.1038/s41598-026-40576-6
Słowa kluczowe: produkcja turbin wiatrowych, roboty współpracujące, cyfrowy bliźniak, interakcja człowiek–robot, elastyczna automatyzacja