Clear Sky Science · tr
Hiperspektral ve LiDAR görüntüleri için çapa yönlendirmeli çokgörünümlü bulanık kümeleme
Dünyayı Daha Net Görmek
Tarım sağlığından şehir büyümesine kadar uydular artık gezegenimizi dikkat çekici ayrıntıyla izliyor. Ancak farklı sensörler aynı yeri çok farklı şekillerde görüyor: bazıları bitki örtüsünün ince renklerini kaydederken, diğerleri binaların ve yüzeylerin kesin biçimini yakalıyor. Bu çalışma, bu zıt bakış açılarını birleştirerek arazi alanlarını anlamlı kategorilere otomatik olarak ayırmanın yeni bir yolunu tanıtıyor; böylece makineler pahalı insan etiketlerine bel bağlamadan değişen dünyamızı daha iyi anlayabiliyor.
Neden Birinden Çok Göz Daha İyidir
Modern Dünya gözlem görevleri nadiren tek tip bir kameraya dayanır. Hiperspektral görüntüleyiciler, toprak, ürünler ve yapay malzemelerin kimyasal parmak izlerini ortaya çıkaran onlarca hatta yüzlerce renk bandı ölçer. Buna karşılık LiDAR sensörleri, yerin üç boyutlu bir resmini oluşturmak için lazer darbeleri gönderir; bina yüksekliklerini, ağaç örtülerini ve ince yüzey yapısını yakalar. Aynı şehir bloğu üzerinde her iki sensör piksel piksele hizalanmış olsa da çok farklı bilgiler kodlanır. Zorluk, bu pikselleri binalar, yollar veya bahçeler gibi arazi örtüsü türlerine, her bir sensörün güçlü yönlerinden yararlanırken yine de yerde ne olduğuna dair paylaşılan, tutarlı bir karara varacak şekilde kümelendirmektir. 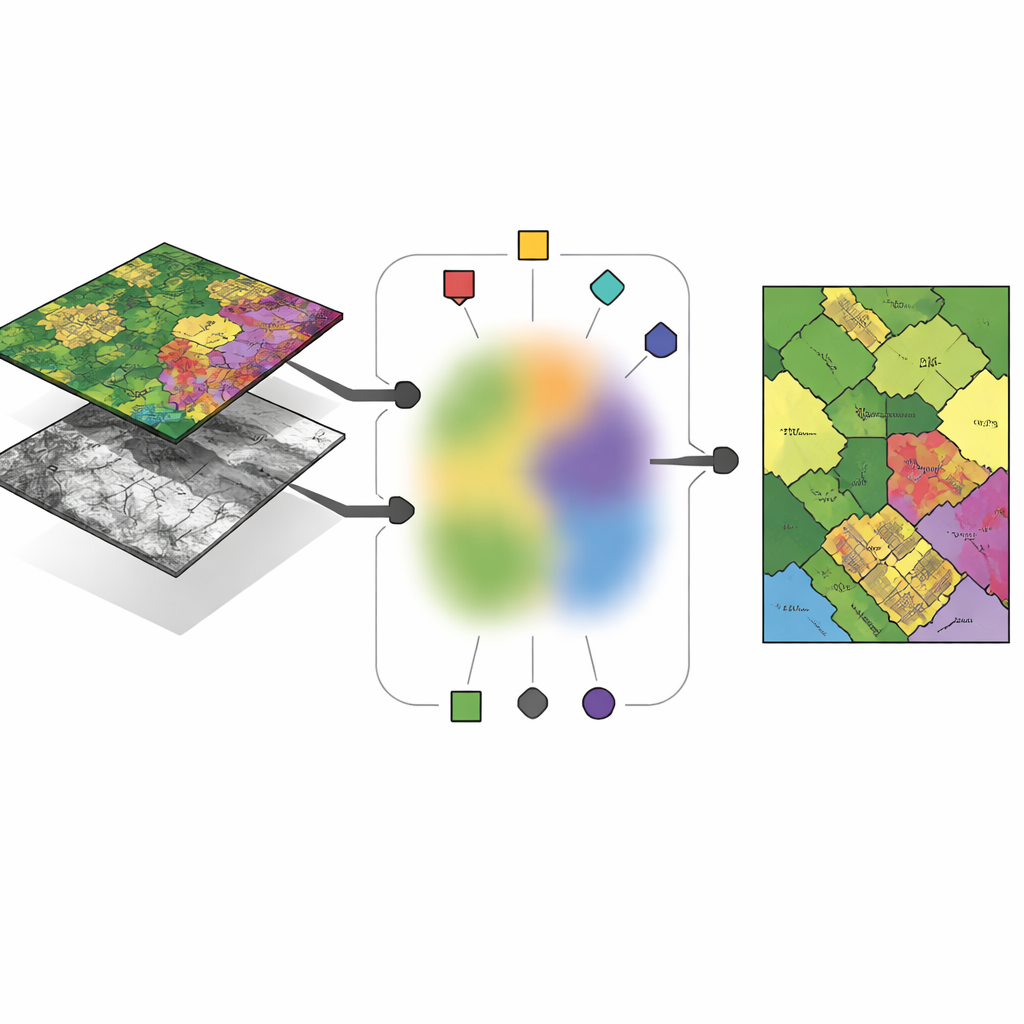
Çapalar: Veri Denizinde Temsilci Noktalar
Yazarlar, algoritmanın her sensörde her küme için tamamen serbest “merkezler” icat etmesine izin vermek yerine, bu merkezleri çapalar adı verilen dikkatle seçilmiş küçük piksel kümesinden oluşturmaya öneriyor. Bu çapalar, her görüntüdeki ana desenleri özetleyen tipik örnekler gibi davranır. Belirli bir sensördeki her küme merkezi, çapalarının ağırlıklı bir karışımı olarak ifade edilir; bu, merkezlerin gerçek, gözlemlenmiş verilere yakın kalmasını sağlar ve kararsız veya anlamsız çözümleri önler. Bu tasarım, yöntemin öğrenmesi gereken serbest parametre sayısını azaltır ve sonuçları yorumlamayı kolaylaştırır: bir küme merkezi yüksek boyutlu uzayda yüzen soyut bir nokta yerine “bu birkaç somut çapa pikselinin arasındaki bir yerde” olur.
Sensörler Arasında Grup Üyeliği Paylaşımı
Çapa yönlendirmeli çokgörünümlü bulanık kümeleme (AMVFC) olarak adlandırılan yeni çerçevenin temel fikri, “kümelerin nerede olduğu” ile “her pikselin onlara ne kadar ait olduğu”nu ayırmaktır. Her sensör—hiperspektral ve LiDAR—kendi dünyayı görme biçimine uygun ayrı küme merkezlerini korur, ancak tüm sensörler tek bir bulanık üyelik tablosunu paylaşır. Bu paylaşılan tablo, her piksel için katı bir evet-hayır atamasından ziyade her arazi örtüsü grubuna yumuşak aidiyet derecelerini kaydeder. İki görüntü mekansal olarak hizalandığı için, her iki görünümdeki aynı piksel bu üyelik değerlerini paylaşmak zorundadır; bu da sensörleri karar düzeyinde birbirine bağlar. Yöntem daha sonra çapaların karışımlarını ve paylaşılan üyelikleri dönüşümlü olarak ayarlar, her sensörün verisini mümkün olduğunca doğru yeniden inşa ederken bu sensörler arası uyumu korumaya çalışır.
Doğrusal Olmayan Desenler İçin Daha Derine Gitmek
Verideki karmaşık, doğrusal olmayan ilişkilerle daha iyi başa çıkmak için yazarlar yöntemlerini ADMVFC adlı derin bir versiyona genişletir. Burada, paylaşılan bir konvolüsyonel otomatik kodlayıcı önce hem hiperspektral hem de LiDAR girdilerini ortak bir gizli temsile sıkıştırır. Hafif bir adaptör, kodlamadan önce LiDAR kanallarını azaltılmış hiperspektral kanallarla hizalar, böylece her iki modalite de aynı ağa beslenir. Bu gizli uzayda aynı çapa yönlendirmeli bulanık kümeleme şeması uygulanır: çapalar özellikleri özetler, küme merkezleri çapaların karışımlarıdır ve paylaşılan bulanık üyelik tablosu modaliteleri birbirine bağlar. Eğitim, aynı anda iki hedefi dengeler—her sensörü doğru şekilde yeniden oluşturmak ve her iki görünümü de uyan ortak bir kümelemeyi gizli uzayda bulmak.
Yöntemi Teste Sokmak
Araştırmacılar AMVFC ve onun derin eşdeğerini İtalya’daki Trento yakınlarındaki tarım alanları, Mississippi, Gulfport’taki kentsel sahneler ve Teksas, Houston’daki karmaşık bir şehir-ve-banliyö bölgesi olmak üzere üç kıyaslama alanında değerlendirir. Her durumda hiperspektral görüntüler eşleşen LiDAR verileriyle birleştirilir ve yöntemleri dokuz yerleşik çokmodlu kümeleme tekniğiyle karşılaştırılır. Derin versiyon ADMVFC, Trento ve Gulfport sahalarında en iyi genel performansı sergiler; insan etiketli haritalarla daha yüksek doğruluk ve daha iyi uyum sağlarken pek çok grafik-ağırlıklı rakibinden daha hızlı kalır. Daha karmaşık Houston sahnesinde ise daha basit AMVFC, muhtemelen derin ağın arka plan ile etiketli pikseller arasındaki aşırı dengesizlikle başa çıkmakta zorlanması nedeniyle derin kardeşinden biraz daha iyi performans gösterir. Tüm testlerde her iki versiyon da örnek sayısıyla neredeyse doğrusal ölçeklenir, bu da onları büyük uzaktan algılama koleksiyonları için pratik kılar. 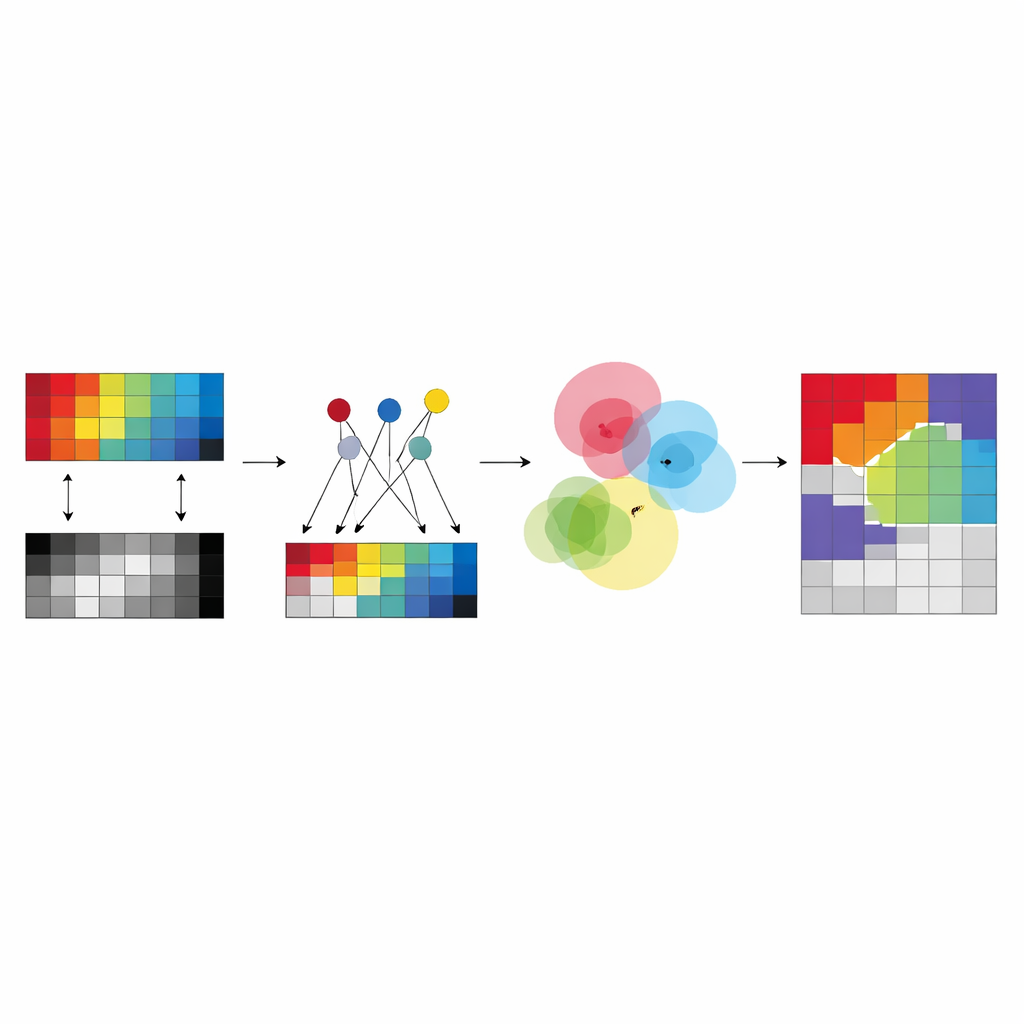
Gezegenin Haritalanması İçin Anlamı
Basitçe ifade etmek gerekirse, bu çalışma farklı uydu “gözlerinin” yeryüzünde gördükleri hakkında ortak bir anlayışa insan denetimi gerektirmeden ulaşmasına olanak sağlayan bir yol sunuyor. Küme merkezlerini gerçek çapa piksellerinde temellendirerek ve hiperspektral ile LiDAR verilerini bulanık grup atamalarını paylaşmaya zorlayarak, yöntemler birçok mevcut araçtan daha güvenilir, yorumlanabilir arazi örtüsü haritaları üretiyor. Derin uzantı, orta derecede karmaşık sahnelerde ekstra güç katarken, özgün çapa tabanlı model veri seyrek veya gürültülü olduğunda sağlamlığını koruyor. Birlikte, bu yaklaşımlar gezegenimizin yüzeyinin daha hızlı, daha ölçeklenebilir ve daha güvenilir otomatik haritalanmasına doğru işaret ediyor.
Atıf: Xiao, L., Liu, S. & Liu, Y. Anchor-guided multi-view fuzzy clustering for hyperspectral and LiDAR images. Sci Rep 16, 10175 (2026). https://doi.org/10.1038/s41598-026-40213-2
Anahtar kelimeler: uzaktan algılama, çokmodlu görüntüleme, denetimsiz kümeleme, hiperspektral ve LiDAR, arazi örtüsü haritalama