Clear Sky Science · ja
ハイパースペクトルとLiDAR画像のためのアンカー誘導型マルチビュー曖昧クラスタリング
地球をより鮮明に見る
作物の健康状態から都市の拡大まで、衛星は今や驚くべき詳細で地球を観測しています。しかし、異なるセンサーは同じ場所を非常に異なる形で捉えます。あるセンサーは植生の微妙な色合いを記録し、別のセンサーは建物や地形の正確な形状を捉えます。本研究は、こうした対照的な視点を組み合わせて土地領域を自動的に意味あるカテゴリに分ける新しい手法を紹介します。高価な人手によるラベルに頼らずに、変化する世界を機械がより良く理解できるようにすることを目指しています。
多くの目が一つより優れている理由
現代の地球観測ミッションは滅多に単一のカメラだけに依存しません。ハイパースペクトル撮像装置は何十あるいは何百もの波長帯を測り、土壌や作物、人工物の化学的特徴を明らかにします。一方でLiDARセンサーはレーザーパルスを発射して地表の三次元像を構築し、建物の高さや樹冠、微細な表面構造を捉えます。同じ市街地でも両者は画素ごとに整合されていますが、非常に異なる情報を符号化します。課題は、これらの画素を建物、道路、果樹園といった土地被覆タイプにクラスタリング(グループ化)することです。各センサーの強みを活かしつつも、地表が何であるかについて共有され一貫した判断に到達する方法が求められます。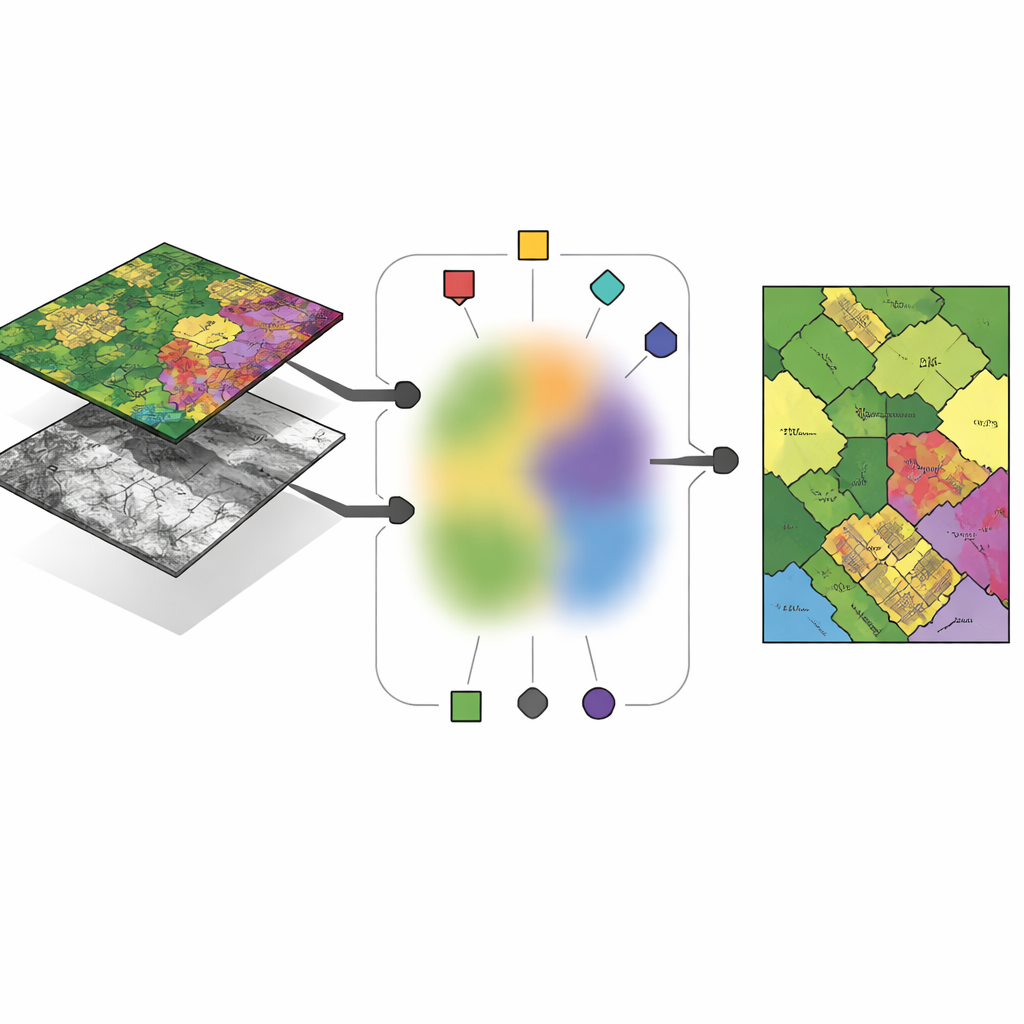
アンカー:データの海における代表点
各センサーごとに完全に自由な“中心”をアルゴリズムに作らせるのではなく、著者らはアンカーと呼ばれる慎重に選ばれた少数の画素からこれらの中心を構築することを提案します。これらのアンカーは各画像の主要なパターンを要約する典型例のように機能します。あるセンサーにおける各クラスタ中心はアンカーの重み付き混合として表現され、これにより中心が実際に観測されたデータに近い位置に留まり、不安定または無意味な解を避けられます。この設計は学習すべき自由パラメータの数を減らし、結果の解釈を容易にします。クラスタ中心は高次元空間に浮かぶ抽象点ではなく、「これら少数の具体的なアンカー画素の間にあるどこか」になるわけです。
センサー間で所属を共有する
アンカー誘導型マルチビュー曖昧クラスタリング(AMVFC)と呼ばれる新しいフレームワークの主要な考え方は、「クラスタがどこにあるか」と「各画素がどれだけ強くそれらに属するか」を分離することです。各センサー(ハイパースペクトルとLiDAR)はそれぞれ固有のクラスタ中心を持ち、観測方法に合わせて調整されますが、すべてのセンサーは単一の曖昧所属表(fuzzy memberships)を共有します。この共有表は、各画素について各土地被覆グループへのソフトな所属度合いを記録し、単純な二者択一の割り当てではなく柔らかな割当を与えます。両画像は空間的に整合しているため、両ビューの同一画素はこれらの所属値を共有しなければならず、意思決定レベルでセンサーを結びつけます。手法はアンカー混合と共有所属を交互に調整し、各センサーのデータを可能な限り正確に再構成しつつ、センサー間の合意を保つ解を探します。
非線形パターンに対応するために深く掘る
データ中の複雑で非線形な関係を扱うために、著者らはADMVFCと呼ぶ深層版にアプローチを拡張します。ここでは、共有の畳み込みオートエンコーダがまずハイパースペクトルとLiDARの入力を共通の潜在表現に圧縮します。軽量のアダプタがエンコード前にLiDARチャネルを縮小されたハイパースペクトルチャネルに整合させるため、両モダリティは同じネットワークに入力されます。この潜在空間で同じアンカー誘導型曖昧クラスタリングの仕組みが適用されます:アンカーは特徴を要約し、クラスタ中心はアンカーの混合で表され、共有された曖昧所属表がモダリティを結びつけます。学習は二つの目的を同時にバランスさせます—各センサーを正確に再構成することと、両ビューに適合する潜在空間での共同クラスタリングを見つけることです。
手法を試す
研究者らはAMVFCとその深層版を三つのベンチマーク地域で評価しました:イタリア・トレント近郊の農地、ミシシッピ州ガルフポートの都市景観、テキサス州ヒューストンの複雑な市街地と郊外の混在地域です。各ケースでハイパースペクトル画像と対応するLiDARデータを組み合わせ、既存の九つのマルチモーダルクラスタリング手法と比較しました。深層版のADMVFCはトレントとガルフポートのサイトで総合的に最良の性能を示し、精度が高く人手ラベル地図との一致も良好でありながら、多くのグラフ重視の競合手法よりも高速でした。より複雑なヒューストンのシーンでは、単純なAMVFCが深層版をわずかに上回りました。これは深層ネットワークが背景とラベル付き画素の極端な不均衡に苦しんだためと考えられます。すべてのテストを通じて、両バージョンともサンプル数に対してほぼ線形にスケールし、大規模なリモートセンシングコレクションに実用的であることが示されました。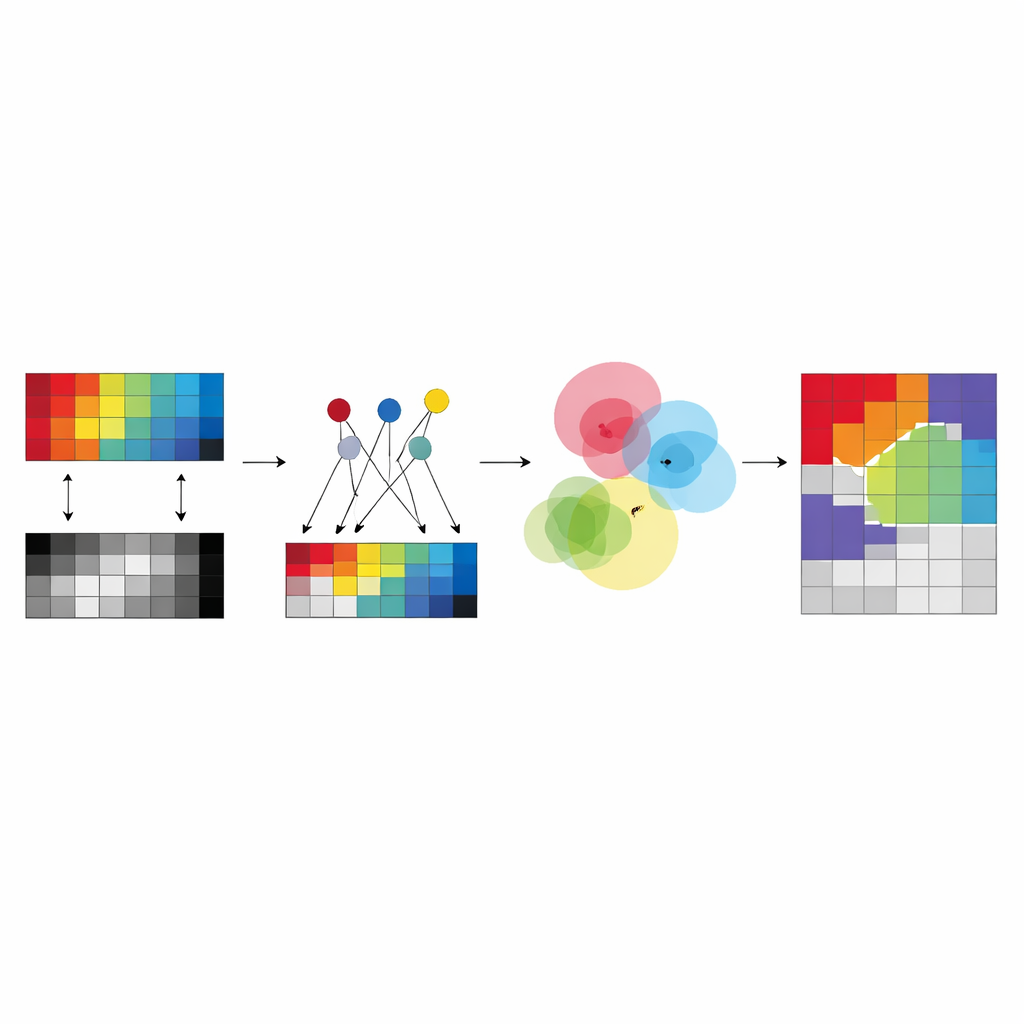
これは地図作成に何をもたらすか
平たく言えば、この研究は異なる衛星の“目”が人手の監督なしに地表で見ているものについて共通の理解に到達する方法を提供します。クラスタ中心を実際のアンカー画素に基づかせ、ハイパースペクトルとLiDARデータに曖昧なグループ割り当ての共有を強制することで、これらの手法は既存の多くの手法よりも信頼性が高く解釈しやすい土地被覆マップを生成します。深層拡張は中程度の複雑さのシーンで追加の性能を発揮し、元のアンカーベースのモデルはデータが希薄またはノイズが多い場合でも堅牢に動作します。これらを合わせることで、地表の自動マッピングをより高速に、よりスケーラブルに、より信頼できるものへと導く方向性が示されています。
引用: Xiao, L., Liu, S. & Liu, Y. Anchor-guided multi-view fuzzy clustering for hyperspectral and LiDAR images. Sci Rep 16, 10175 (2026). https://doi.org/10.1038/s41598-026-40213-2
キーワード: リモートセンシング, マルチモーダルイメージング, 教師なしクラスタリング, ハイパースペクトルとLiDAR, 土地被覆マッピング