Clear Sky Science · ru
Кластеризация с несколькими видами по якорям для гиперспектральных и LiDAR-изображений
Видеть Землю яснее
От состояния посевов до роста городов — спутники наблюдают нашу планету с поразительной детализацией. Но разные датчики воспринимают одно и то же место по‑разному: одни фиксируют тонкие оттенки растительности, другие отражают форму зданий и рельефа. В этом исследовании предложен новый способ автоматически группировать участки земли в содержательные категории, объединяя эти контрастные представления, чтобы машины могли лучше интерпретировать меняющийся мир без опоры на дорогие человеко‑созданные метки.
Почему несколько «глаз» лучше, чем один
Современные миссии по наблюдению Земли редко используют один тип сенсора. Гиперспектральные приборы измеряют десятки или сотни спектральных полос, раскрывая химические отпечатки почвы, культур и искусственных материалов. LiDAR‑датчики, напротив, посылают лазерные импульсы, чтобы построить трёхмерную модель поверхности, фиксируя высоты зданий, кроны деревьев и тонкую структуру рельефа. Для одной и той же городской площадки оба сенсора выровнены поксель в поксель, но кодируют очень разную информацию. Задача — сгруппировать эти пиксели по типам наземного покрытия — например здания, дороги или сады — так, чтобы учитывались сильные стороны каждого сенсора, но при этом достигалось единое, согласованное решение о том, что находится на земле. 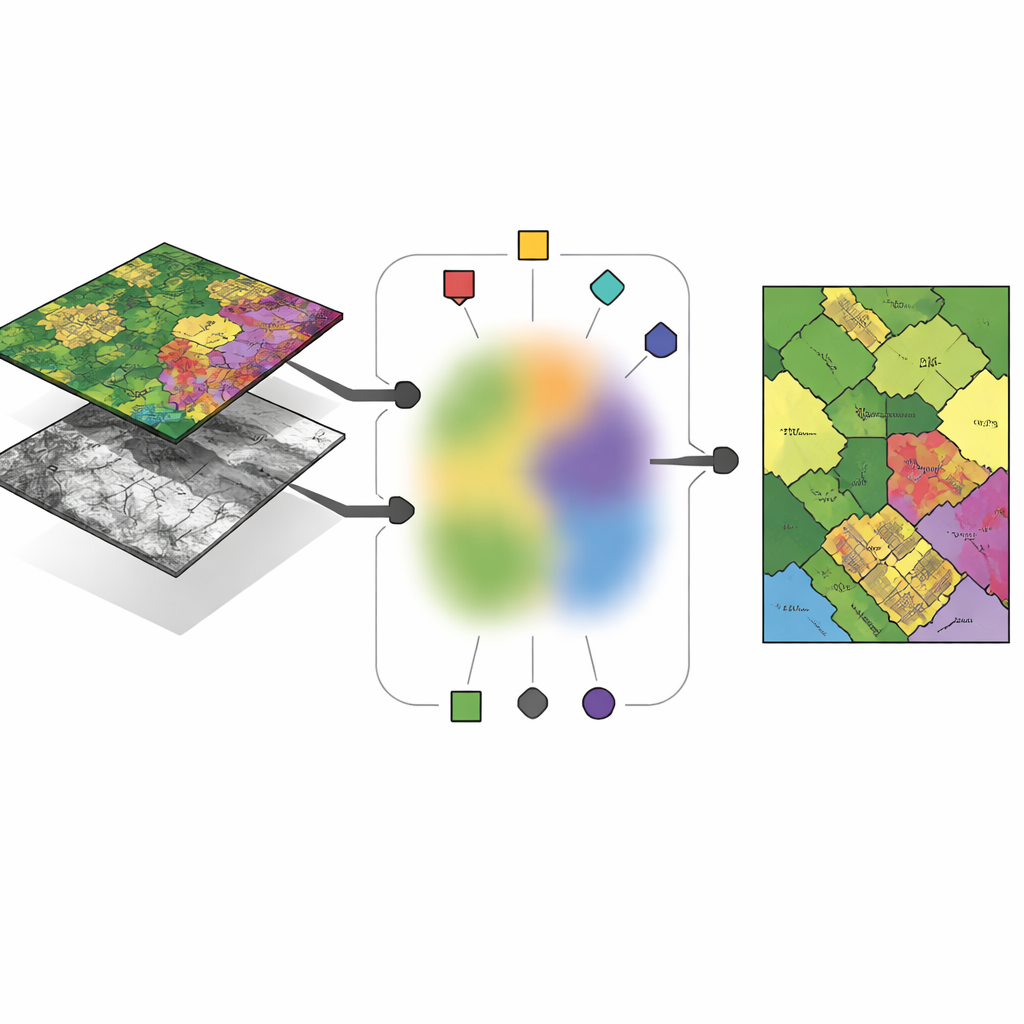
Якоря: репрезентативные точки в море данных
Вместо того чтобы позволять алгоритму свободно придумывать «центры» кластеров для каждого сенсора, авторы предлагают строить эти центры из небольшого набора тщательно отобранных пикселей, называемых якорями. Эти якоря служат типичными примерами, суммирующими основные шаблоны в каждом изображении. Каждый центр кластера в данном сенсоре выражается как взвешенная смесь его якорей, что заставляет центры оставаться близкими к реальным наблюдаемым данным и предотвращает нестабильные или бессмысленные решения. Такая схема уменьшает число свободных параметров, которые метод должен обучить, и делает результаты легче интерпретируемыми: центр кластера становится «где‑то между этими конкретными якорными пикселями», а не абстрактной точкой, плавающей в высокоразмерном пространстве.
Совместное распределение членства по сенсорам
Ключевая идея новой структуры, названной anchor-guided multi-view fuzzy clustering (AMVFC), — отделить «где находятся кластеры» от «насколько сильно каждый пиксель им принадлежит». Каждый сенсор — гиперспектральный и LiDAR — хранит свои собственные центры кластеров, адаптированные к его способу восприятия, но все сенсоры разделяют единую таблицу нечеткого членства. Эта общая таблица фиксирует для каждого пикселя мягкие степени принадлежности к каждой группе наземного покрытия, а не жёсткое да/нет. Поскольку два изображения пространственно выровнены, тот же пиксель в обеих видах должен иметь одинаковые значения членства, связывая сенсоры на уровне принятия решений. Метод затем поочередно корректирует смеси якорей и общие членства, стремясь как можно точнее восстановить данные каждого сенсора, сохраняя при этом это межсенсорное согласование.
Глубже — для нелинейных закономерностей
Чтобы лучше обрабатывать сложные нелинейные зависимости в данных, авторы расширяют подход до глубокой версии под названием ADMVFC. Здесь общий сверточный автоэнкодер сначала сжимает и гиперспектральные, и LiDAR‑входы в общее латентное представление. Лёгкий адаптер выравнивает каналы LiDAR с уменьшенными гиперспектральными каналами перед кодированием, так что обе модальности подаются в одну сеть. В этом латентном пространстве применяется та же схема кластеризации с якорями: якоря суммируют признаки, центры кластеров являются смесями якорей, а общая таблица нечеткого членства связывает модальности. Обучение балансирует две цели одновременно — точное восстановление каждого сенсора и поиск совместной кластеризации в латентном пространстве, которая удовлетворяет обоим видам.
Испытание метода
Исследователи оценили AMVFC и её глубокий аналог на трёх эталонных участках: сельскохозяйственных полях возле Тренто в Италии, городских сценах в Галфпорте, Миссисипи, и сложном районе город‑пригород в Хьюстоне, Техас. В каждом случае они сочетали гиперспектральные изображения с соответствующими LiDAR‑данными и сравнивали свои методы с девятью устоявшимися мультимодальными методиками кластеризации. Глубокая версия ADMVFC показала наилучшие общие показатели на площадках Тренто и Галфпорт, достигая более высокой точности и лучшего согласия с картами, размеченными людьми, оставаясь при этом быстрее многих граф‑интенсивных конкурентов. В более сложной сцене в Хьюстоне более простой AMVFC немного превзошёл свою глубокую версию, вероятно потому, что глубокая сеть испытывала трудности с экстремальным дисбалансом между фоном и размеченными пикселями в этом датасете. Во всех тестах обе версии масштабируются почти линейно по числу образцов, что делает их практичными для больших коллекций дистанционного зондирования. 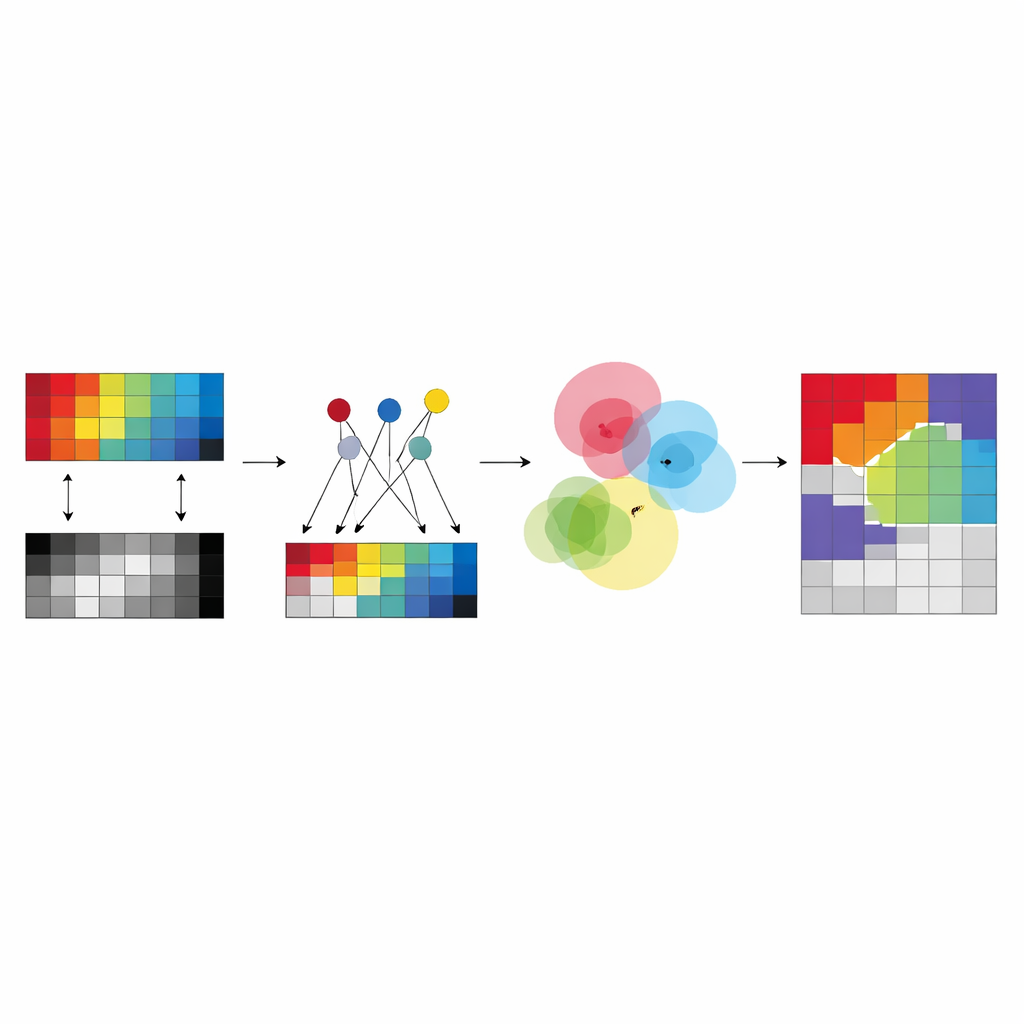
Что это значит для картографирования планеты
Проще говоря, эта работа предлагает способ для разных спутниковых «глаз» прийти к общему пониманию того, что они видят на Земле, без необходимости человеческого надзора. Закрепляя центры кластеров в реальных якорных пикселях и заставляя гиперспектральные и LiDAR‑данные разделять нечеткие групповые присвоения, методы дают более надёжные и интерпретируемые карты покрова земли, чем многие существующие инструменты. Глубокое расширение добавляет мощности для умеренно сложных сцен, тогда как исходная модель на основе якорей остаётся робустной, когда данные разрежены или шумны. В совокупности они указывают на более быстрое, масштабируемое и надёжное автоматическое картографирование поверхности нашей планеты.
Цитирование: Xiao, L., Liu, S. & Liu, Y. Anchor-guided multi-view fuzzy clustering for hyperspectral and LiDAR images. Sci Rep 16, 10175 (2026). https://doi.org/10.1038/s41598-026-40213-2
Ключевые слова: дистанционное зондирование, мультимодальное изображение, ненаблюдаемая кластеризация, гиперспектральные и LiDAR, картографирование покрова земли