Clear Sky Science · nl
Anker-geleide multi-view fuzzy clustering voor hyperspectrale en LiDAR‑beelden
De aarde helderder zien
Van gewasgezondheid tot stadsuitbreiding: satellieten volgen onze planeet tegenwoordig met opmerkelijke detailniveaus. Verschillende sensoren kijken echter op zeer verschillende manieren naar dezelfde plek: sommige leggen subtiele kleuren van vegetatie vast, andere reconstrueren de precieze vorm van gebouwen en terrein. Deze studie introduceert een nieuwe manier om landgebieden automatisch in zinvolle categorieën te groeperen door deze contrasterende beelden te combineren, zodat machines zonder dure handmatige labels beter kunnen begrijpen wat er verandert in onze wereld.
Waarom meerdere ogen beter zijn dan één
Moderne waarnemingsmissies voor de aarde vertrouwen zelden op één soort camera. Hyperspectrale sensoren meten tientallen of zelfs honderden golflengtebanden en geven chemische vingerafdrukken van bodem, gewassen en materialen prijs. LiDAR‑sensoren sturen daarentegen laserpulsen uit om een driedimensionaal beeld van het terrein op te bouwen, waarmee gebouwhoogtes, boomkruinen en subtiele oppervlaktestructuur zichtbaar worden. Over hetzelfde stadsblok zijn beide sensoren pixel‑gewijs uitgelijnd, maar ze coderen heel andere informatie. De uitdaging is om die pixels in landbedekkingsklassen te clusteren—zoals gebouwen, wegen of boomgaarden—op een manier die de sterke punten van elke sensor benut en toch tot een gedeelde, consistente beslissing komt over wat er op de grond ligt. 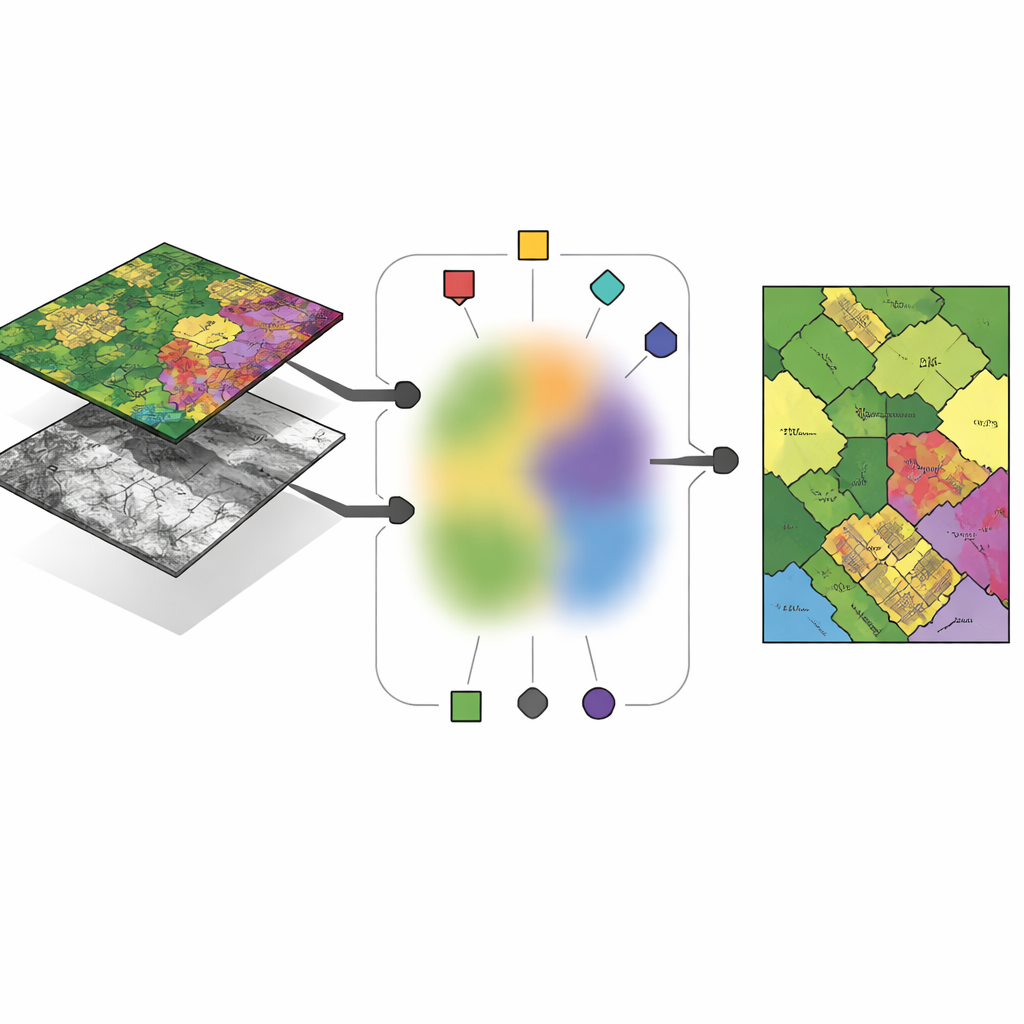
Ankers: representatieve punten in een zee van data
In plaats van het algoritme volledig vrije ‘centra’ voor elke cluster in elke sensor te laten uitvinden, stellen de auteurs voor die centra op te bouwen uit een klein aantal zorgvuldig gekozen pixels, ankers genaamd. Deze ankers functioneren als typische voorbeelden die de belangrijkste patronen in elk beeld samenvatten. Elk clustercentrum in een gegeven sensor wordt uitgedrukt als een gewogen mengsel van zijn ankers, waardoor de centra dicht bij echte, waargenomen data blijven en instabiele of onzinnige oplossingen worden vermeden. Dit ontwerp vermindert het aantal vrije parameters dat het model moet leren en maakt de resultaten beter interpreteerbaar: een clustercentrum wordt ‘ergens tussen deze enkele concrete ankerpixels’ in plaats van een abstract punt dat in een hoge‑dimensionale ruimte zweeft.
Groepslidmaatschap delen tussen sensoren
Het kernidee van het nieuwe kader, anchor‑guided multi‑view fuzzy clustering (AMVFC), is om te scheiden ‘waar de clusters zijn’ van ‘hoe sterk elke pixel eraan toebehoort’. Elke sensor—hyperspectraal en LiDAR—houdt zijn eigen clustercentra, afgestemd op zijn specifieke zienswijze, maar alle sensoren delen één enkele tabel met fuzzy lidmaatschappen. Deze gedeelde tabel registreert voor elke pixel zachte graden van toebehoren aan elke landbedekkingsgroep in plaats van een strikte ja‑of‑nee‑toewijzing. Omdat de twee beelden ruimtelijk zijn uitgelijnd, moet dezelfde pixel in beide weergaven deze lidmaatschapswaarden delen, waarmee de sensoren op beslissingsniveau aan elkaar worden gekoppeld. De methode past vervolgens afwisselend de anker‑mengsels en de gedeelde lidmaatschappen aan, met als doel de data van elke sensor zo nauwkeurig mogelijk te reconstrueren terwijl deze over‑sensor overeenkomst behouden blijft.
Dieper gaan voor niet‑lineaire patronen
Om complexe, niet‑lineaire relaties in de data beter aan te kunnen, breiden de auteurs hun benadering uit naar een diepe variant genaamd ADMVFC. Hier comprimeert een gedeelde convolutionele autoencoder eerst zowel hyperspectrale als LiDAR‑ingangen naar een gemeenschappelijke latente representatie. Een lichtgewicht adapter brengt de LiDAR‑kanalen in lijn met de teruggebrachte hyperspectrale kanalen voordat ze worden gecodeerd, zodat beide modaliteiten in hetzelfde netwerk voeren. In deze latente ruimte wordt hetzelfde anker‑geleide fuzzy clustering‑schema toegepast: ankers summarizen de kenmerken, clustercentra zijn mengsels van ankers en een gedeelde fuzzy lidmaatschaptabel verbindt de modaliteiten. Het trainen balanceert twee doelen tegelijk—de reconstructie van iedere sensor accurate maken en een gezamenlijke clustering in de latente ruimte vinden die bij beide weergaven past.
De methode op de proef stellen
De onderzoekers evalueren AMVFC en zijn diepe tegenhanger op drie benchmarkgebieden: landbouwpercelen nabij Trento in Italië, stedelijke scènes in Gulfport, Mississippi, en een complexe stads‑en‑voorstad‑regio in Houston, Texas. In elk geval combineren ze hyperspectrale beelden met bijbehorende LiDAR‑gegevens en vergelijken hun methoden met negen gevestigde multimodale clusteringtechnieken. De diepe versie, ADMVFC, levert de beste algehele prestaties voor de Trento‑ en Gulfport‑locaties, met hogere nauwkeurigheid en betere overeenstemming met door mensen gelabelde kaarten, terwijl hij sneller blijft dan veel graf‑zware concurrenten. In de complexere scène van Houston presteert het eenvoudigere AMVFC iets beter dan zijn diepe broeder, waarschijnlijk omdat het diepe netwerk moeite heeft met de extreme onbalans tussen achtergrond en gelabelde pixels in die dataset. In alle tests schalen beide versies bijna lineair met het aantal monsters, waardoor ze praktisch toepasbaar zijn voor grote remote‑sensing verzamelingen. 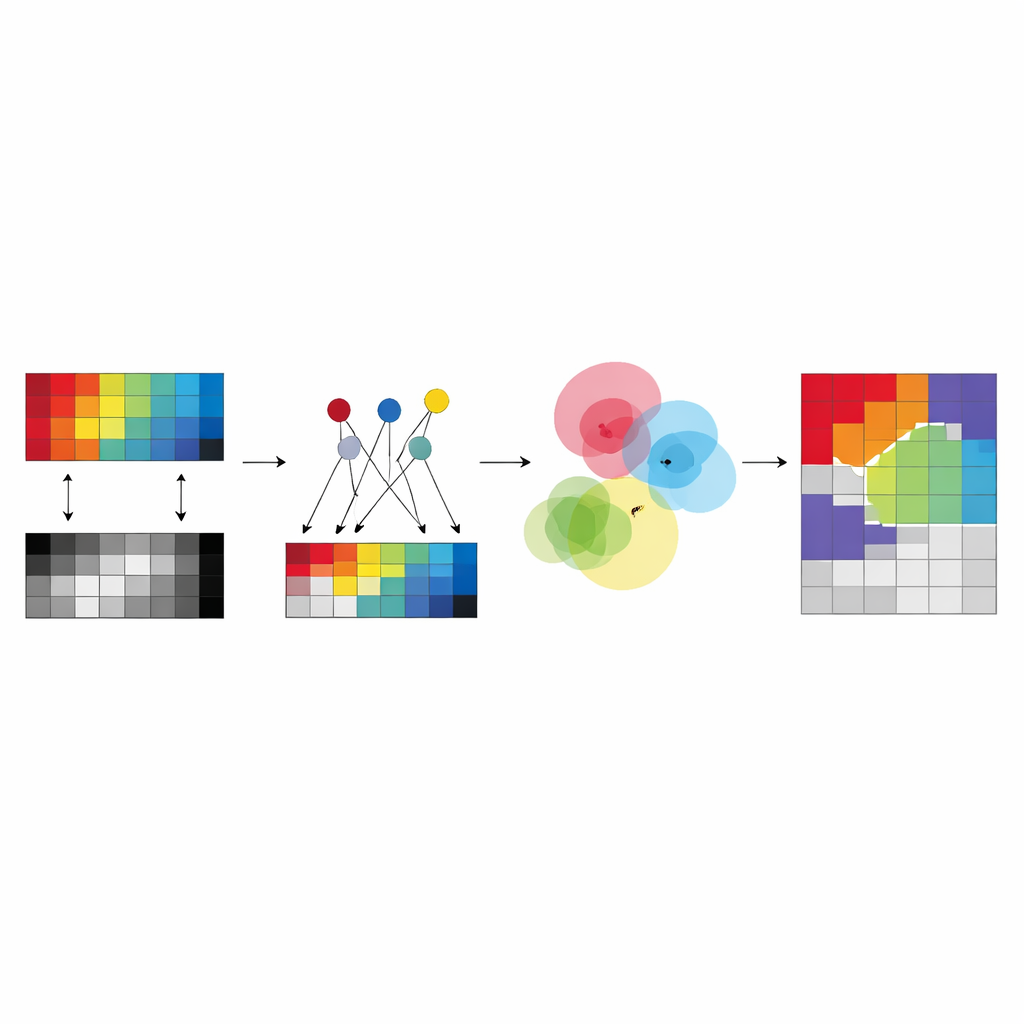
Wat dit betekent voor het in kaart brengen van de planeet
In eenvoudige bewoordingen biedt dit werk een manier voor verschillende satelliet‑“ogen” om tot een gemeenschappelijk begrip te komen van wat ze op aarde zien, zonder menselijke supervisie. Door clustercentra te verankeren in echte ankerpixels en hyperspectrale en LiDAR‑data te dwingen gedeelde fuzzy groepsassignaties te gebruiken, produceren de methoden betrouwbaardere, beter interpreteerbare landbedekkingskaarten dan veel bestaande tools. De diepe uitbreiding voegt extra kracht toe voor matig complexe scènes, terwijl het originele ankergebaseerde model robuust blijft wanneer data schaars of ruisig zijn. Samen wijzen ze op snellere, beter schaalbare en meer betrouwbare automatische kaarten van het aardoppervlak.
Bronvermelding: Xiao, L., Liu, S. & Liu, Y. Anchor-guided multi-view fuzzy clustering for hyperspectral and LiDAR images. Sci Rep 16, 10175 (2026). https://doi.org/10.1038/s41598-026-40213-2
Trefwoorden: remote sensing, multimodale beeldvorming, onbegeleide clustering, hyperspectraal en LiDAR, landbedekkingskaarten