Clear Sky Science · tr
Sürücüsüz araç güvenliğini iyileştirmek için öğrenme destekli gözlemci tasarımı
Neden daha akıllı güvenlik otonom araçlar için önemli
Arabalar sürüşün daha fazla kısmını devraldıkça, ani manevralar, kaygan zeminler veya lastik problemleri sırasında bile kontrolü korumaları gerekir. Günümüz sistemleri aracın açıkça kontrol dışına çıktığını tespit edebiliyor, ancak araç teknik olarak stabil olsa da istenen yolu artık iyi takip etmediği gri zonu fark etmekte genellikle zorlanıyor. Bu makale, otonom araçların davranışlarını gerçek zamanlı izlemesine yönelik yeni bir yaklaşım sunuyor; hem açık stabilite kayıplarını hem de kazaya dönüşmeden önce performansın ince düşüşlerini tespit ediyor.
Aracın gerçekten nasıl hareket ettiğini izlemek
Ana fikir, araç viraj alırken veya şerit değiştirirken yanlamasına nasıl hareket ettiğine odaklanmak. Mühendisler, aracın dönme hızının ne olduğu, yanlamasına ne kadar hızlı kaydığı ve planlanan rotadan ne kadar saptığı gibi büyüklükleri izler. Bunların hepsi doğrudan sensörlerle ölçülmez, bu yüzden kestirilmeleri gerekir. Yazarlar bir "gözlemci" inşa ediyor—direksiyon girdisini, hızı ve konumu izleyen ve ardından aracın gizli hareketlerini yeniden oluşturan bir yazılım parçası. Bu gözlemci gerçek hareketi yakından takip edebilirse, aracın güvenliği için içsel bir göz olarak görev yapabilir.
Fizik ve öğrenmeyi harmanlamak
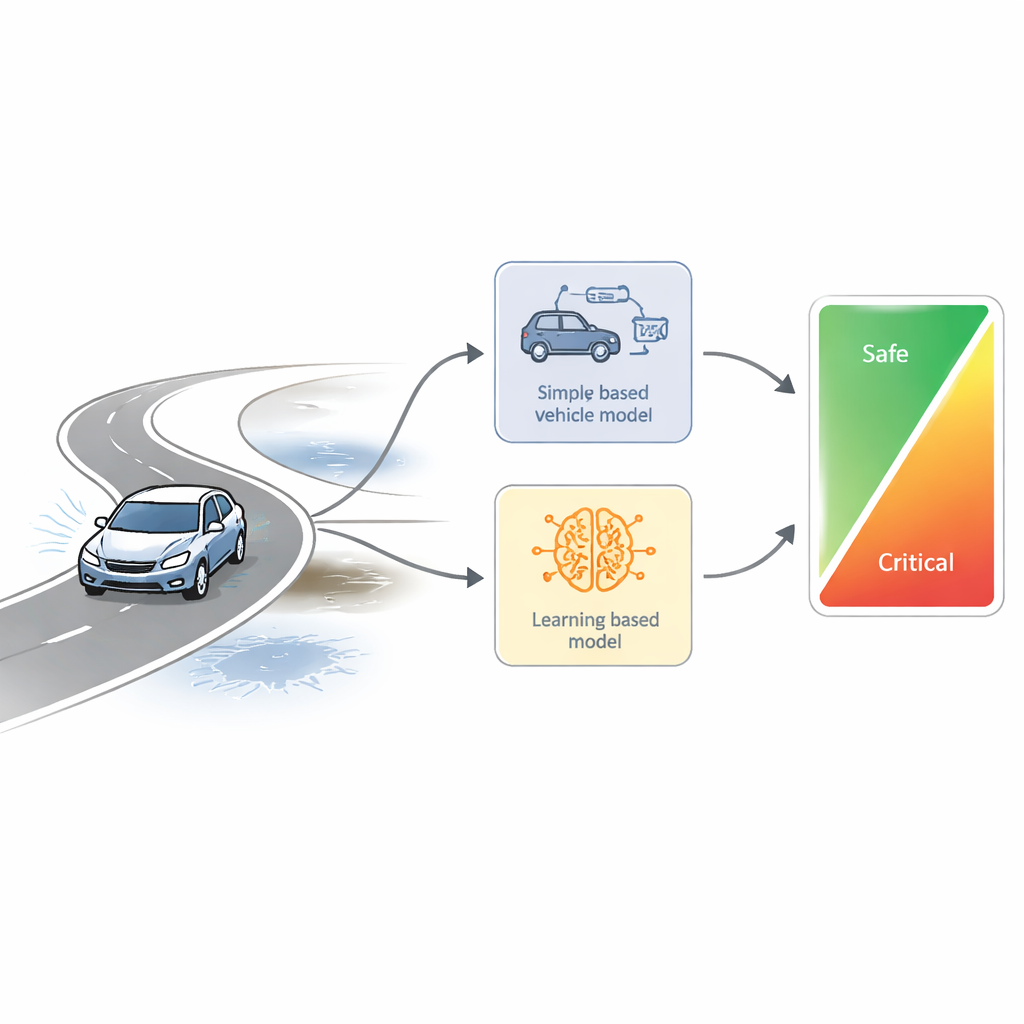
Tek bir modele dayanmak yerine, yeni gözlemci araca dair iki çok farklı bakış açısını birleştiriyor. Birinci bakış, aracı basitleştirilmiş bir bisiklet gibi ele alan geleneksel fizik tabanlı bir model: kütle, eylemsizlik ve lastik sertliği gibi parametreleri kullanarak aracın nasıl davranması gerektiğini tahmin ediyor. Bu model sağlam ve iyi anlaşılmış olsa da araç sınırlarına yaklaştığında daha az doğru oluyor. İkinci bakış ise pekiştirmeli öğrenme ile eğitilmiş öğrenme tabanlı bir model; birçok sürüş örneğinden aracın özellikle sert virajlarda ve diğer doğrusal olmayan durumlarda nasıl tepki verdiğini öğreniyor. İki gözlemciyi paralel çalıştırarak, sistem basit fiziğin ne öngördüğünü öğrenme modelinin gerçek dünya koşullarında ne beklediğiyle karşılaştırıyor.
Anlaşmazlığı güvenlik sinyaline dönüştürmek
Bu çalışmadaki temel güvenlik ölçüsü iki gözlemci arasındaki farktır. Araç nazik, öngörülebilir bir rejimde çalışırken öğrenme modeli ile fizik modeli birbirine yakın olur ve bu fark küçük kalır. Araç daha uç koşullara—yüksek hızda ani şerit değişiklikleri, yol tutuşunun aniden kaybı veya direksiyon doygunluğu gibi—yaklaştıkça öğrenme modeli, basit modelin yakalayamadığı davranışları tespit eder ve fark büyür. Yazarlar bu farkları tek bir değerde topluyor; bu değer güvenli bir "balon" içindeki bir vektör uzunluğu gibi düşünülebilir. Değer seçilmiş iç sınır içinde kaldığı sürece hareket güvenli sayılır; sınır aşıldığında sistem bir güvenlik kritik durumu işaretler.
Yöntemi teste koymak
Araştırmacılar önce yaklaşımı bilgisayar simülasyonlarında test ediyor; burada sanal bir araç değişen hızlarda kıvrımlı bir yolu takip ediyor. Birleşik gözlemcinin kestirim hatalarını küçük tuttuğunu ve araca sert yük binip yanlama takibinin bozulduğu anları net şekilde işaretlediğini gösteriyorlar. Sonrasında gerçek dünya deneylerine geçerek, bir test sahasında otonom bir deneme aracını ve ani şerit değişikliğini içeren standart bir "moose testi"ni kullanıyorlar. Öğrenme modeline hangi sensör sinyallerinin ve ne kadar yakın geçmiş bilgisinin verileceğini dikkatle seçerek kestirim doğruluğunu artırıyor ve güvenlik indeksinin riskli hareketler sırasında güvenilir şekilde tetiklendiğini, aksi hâlde sakin kaldığını kanıtlıyorlar. İstatistiksel ölçümler, öğrenme destekli geliştirilen gözlemcinin daha basit bir kurulumla karşılaştırıldığında kestirim hatalarını yarıdan fazla azalttığını doğruluyor.
Günlük sürüş için anlamı
Uzman olmayanlar için çıkarım şudur: Bu yöntem, sürücüsüz arabalara ne zaman eşiğe yaklaştıklarına dair daha ince bir his veriyor. Sadece "Araba hâlâ stabil mi?" diye sormak yerine sistem, "Beklendiği gibi performans gösteriyor mu yoksa plandan kaymaya mı başlıyor?" sorusunu da soruyor. Sağlam bir fizik modeli ile esnek bir öğrenme modelini karşılaştırarak araç, hareketi yüzeyde hâlâ kabul edilebilir görünse bile tehlikeyi daha erken tespit edebiliyor. Yazarlar bu güvenlik değerlendirmesinin mevcut kontrolörlerle bugün birlikte çalışabileceğini ve gelecekte direksiyon ve fren kararlarına doğrudan geri besleme sağlayarak otomatik araçları ani, gerçek dünya acil durumlarında daha güvenli kılabileceğini gösteriyorlar.
Atıf: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Anahtar kelimeler: özerk sürüş güvenliği, araç yan dinamiği, pekiştirmeli öğrenme, durum kestirimi, sürücü destek sistemleri