Clear Sky Science · ar
تصميم مراقب مدعوم بالتعلّم لتحسين سلامة المركبات الذاتية
لماذا تكتسب السلامة الأذكى أهمية للمركبات الذاتية
مع تولي السيارات جزءاً أكبر من مهمة القيادة، يجب أن تبقى تحت السيطرة حتى أثناء المنعطفات المفاجئة أو الطرق الزلقة أو مشاكل الإطارات. يمكن لأنظمة اليوم اكتشاف فقدان السيطرة الواضح، لكنها غالباً ما تكافح لرصد المنطقة الرمادية حيث تكون المركبة مستقرة تقنياً لكنها لم تعد تتبع المسار المقصود بشكل جيّد. يقدم هذا البحث طريقة جديدة للسيارات الذاتية لمراقبة سلوكها في الزمن الحقيقي، مكتشفةً كل من فقدان الاستقرار الصريح وفقدان الأداء الطفيف قبل أن يتحولا إلى حوادث.
مراقبة كيفية تحرك السيارة فعلاً
الفكرة الأساسية هي التركيز على كيفية تحرك السيارة جانبياً عند الانعطاف أو تغيير المسار. يتتبع المهندسون كميات مثل سرعة دوران السيارة، معدل انحرافها الجانبي، ومدى ابتعادها عن المسار المخطط. هذه الكميات ليست كلها مقاسة مباشرة بالحساسات، لذا يجب تقديرها. يبني المؤلفون «مراقباً» — برنامجاً يراقب مدخلات التوجيه والسرعة والموقع ثم يعيد بناء الحركة المخفية للمركبة. إذا استطاع هذا المراقب متابعة الحركة الحقيقية بدقة، فيمكن أن يعمل كعين داخلية للسيارة لأغراض السلامة.
مزج الفيزياء والتعلّم
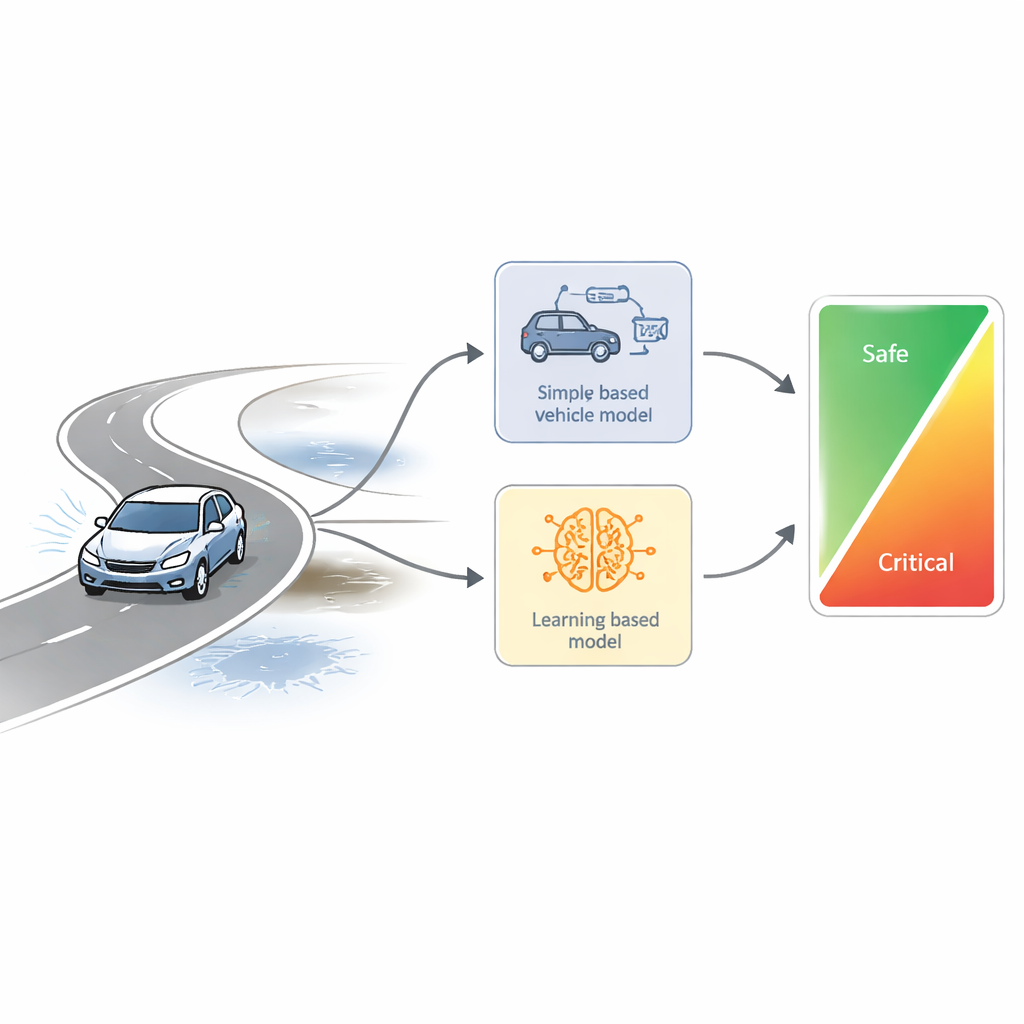
بدلاً من الاعتماد على نموذج واحد، يجمع المراقب الجديد بين منظورين مختلفين للمركبة. أحد المنظورين نموذج فيزيائي تقليدي يعامل المركبة كدراجة مبسطة: يستخدم الكتلة والعزم والمرونة الإطارية للتنبؤ بكيفية تصرف السيارة. هذا النموذج قوي ومفهوم جيداً لكنه أقل دقة عندما تُدفع السيارة إلى حدودها. المنظور الثاني نموذج قائم على التعلّم مدرّب باستخدام التعلّم التعزيزي، الذي يتعلم من العديد من أمثلة القيادة كيفية استجابة السيارة فعلياً، خاصة في الانعطافات الحادة والحالات غير الخطية الأخرى. بتشغيل كلا المراقبين بالتوازي، يقارن النظام ما يتنبأ به النموذج الفيزيائي البسيط بما يتوقعه نموذج التعلّم في ظروف العالم الحقيقي.
تحويل الخلاف إلى إشارة سلامة
المقياس الرئيسي للسلامة في العمل هو الفرق بين المراقبين الاثنين. عندما تعمل السيارة في نطاق هادئ ومتنبأ به، يتفق نموذج التعلّم والنموذج الفيزيائي عن قرب، ويظل هذا الفرق صغيراً. مع اقتراب السيارة من ظروف أكثر تطرفاً — مثل تغييرات مسار حادة بسرعة عالية، فقدان مفاجئ للتلاصق، أو تشبع التوجيه — يكتشف نموذج التعلّم سلوكاً لا يستطيع النموذج البسيط التقاطه، ويكبر الفرق. يجمع المؤلفون هذه الاختلافات في قيمة واحدة، يمكن تصورها كطول متجه داخل «فقاعة» آمنة. طالما بقيت القيمة ضمن حد داخلي مختار، يعتبر السلوك آمناً؛ وعندما تتجاوز هذا الحد، يقوم النظام بوضع علامة على حالة حرجة للسلامة.
وضع الطريقة قيد الاختبار
يختبر الباحثون أولاً نهجهم في محاكيات حاسوبية حيث تتبع سيارة افتراضية طريقاً منحنيّاً بسرعات متغيرة. يوضحون أن المراقب المدمج يحافظ على أخطاء التقدير صغيرة بينما يشير بوضوح إلى اللحظات التي تُضغط فيها السيارة بشدة وتتدهور متابعتها العرضية. بعد ذلك ينتقلون إلى تجارب في العالم الحقيقي باستخدام مركبة اختبار ذاتية في ميدان اختبار، بما في ذلك اختبار موحد مماثل لاختبار «الظبي» بتغيير مسار مفاجئ. من خلال اختيار إشارات الحساسات وسجل البيانات الأخير الذي يزوّد به نموذج التعلّم بعناية، يحسنون دقته في التقدير ويظهرون أن مؤشر السلامة يضيء بشكل موثوق أثناء الحركات الخطرة ويبقى هادئاً خلاف ذلك. تؤكد المقاييس الإحصائية أن المراقب المدعوم بالتعلّم يقلل أخطاء التقدير بأكثر من النصف مقارنةً بإعداد أبسط.
ماذا يعني هذا للقيادة اليومية
لغير المتخصص، الخلاصة هي أن هذه الطريقة تمنح السيارات الذاتية إحساساً أكثر تفصيلاً بموعد اقترابها من الحافة. بدلاً من سؤال واحد فقط: «هل السيارة ما تزال مستقرة؟»، يسأل النظام أيضاً: «هل ما تزال تؤدي كما هو متوقع أم بدأت تنحرف عن الخطة؟» بمقارنة نموذج فيزيائي متين مع نموذج تعلّم مرن، يمكن للسيارة اكتشاف الخطر مبكراً، حتى عندما يبدو تحركها مقبولاً على السطح. يوضح المؤلفون أن هذا التقييم للسلامة يمكن أن يعمل جنباً إلى جنب مع وحدات التحكم الحالية اليوم، وقد يغذي لاحقاً قرارات التوجيه والفرملة مباشرةً للحفاظ على سلامة المركبات الآلية في حالات الطوارئ الواقعية والمفاجئة.
الاستشهاد: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
الكلمات المفتاحية: سلامة القيادة الذاتية, ديناميكيات المركبة العرضية, التعلّم التعزيزي, تقدير الحالة, أنظمة مساعدة السائق