Clear Sky Science · pt
Projeto de observador auxiliado por aprendizado para melhorar a segurança de veículos autônomos
Por que uma segurança mais inteligente importa para carros autônomos
À medida que os carros assumem mais tarefas de condução, eles precisam manter o controle mesmo durante manobras bruscas, em pistas escorregadias ou diante de problemas nos pneus. Os sistemas atuais conseguem detectar quando um veículo está claramente fora de controle, mas frequentemente têm dificuldade em perceber a zona cinzenta em que o carro é tecnicamente estável, porém já não segue bem o trajeto planejado. Este artigo apresenta um novo método para que veículos autônomos monitorem seu próprio comportamento em tempo real, detectando tanto perda franca de estabilidade quanto perdas sutis de desempenho antes que se transformem em acidentes.
Observando como o carro realmente se move
A ideia central é focar em como o carro se desloca lateralmente ao virar ou trocar de faixa. Engenheiros acompanham grandezas como a taxa de rotação do veículo, a velocidade do deslizamento lateral e o quanto ele se afasta da trajetória planejada. Nem todas essas grandezas são medidas diretamente por sensores, então precisam ser estimadas. Os autores constroem um "observador" — um software que observa o comando de direção, a velocidade e a posição e então reconstrói o movimento oculto do veículo. Se esse observador consegue acompanhar de perto o movimento real, ele pode funcionar como o olho interno do carro para fins de segurança.
Misturando física e aprendizado
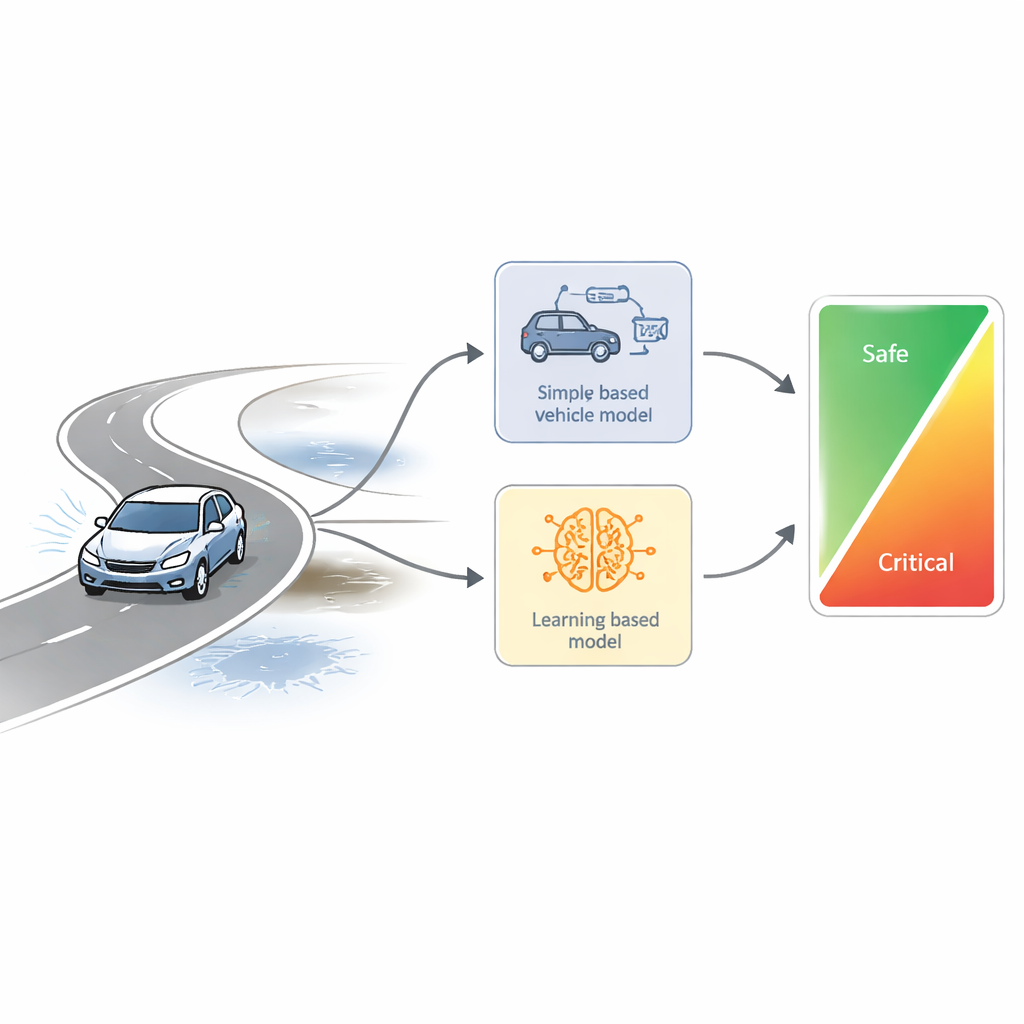
Em vez de confiar em um único modelo, o novo observador combina duas visões muito diferentes do veículo. Uma visão é um modelo tradicional baseado em física que trata o veículo como uma bicicleta simplificada: utiliza massa, momento de inércia e rigidez dos pneus para prever como o carro deve se comportar. Esse modelo é robusto e bem compreendido, mas menos preciso quando o carro é levado aos seus limites. A segunda visão é um modelo baseado em aprendizado treinado por aprendizado por reforço, que aprende com muitos exemplos de condução como o carro responde na prática, especialmente em curvas severas e outras situações não lineares. Ao executar ambos os observadores em paralelo, o sistema compara o que a física simples prevê com o que o modelo de aprendizado espera sob condições reais.
Transformando desacordo em sinal de segurança
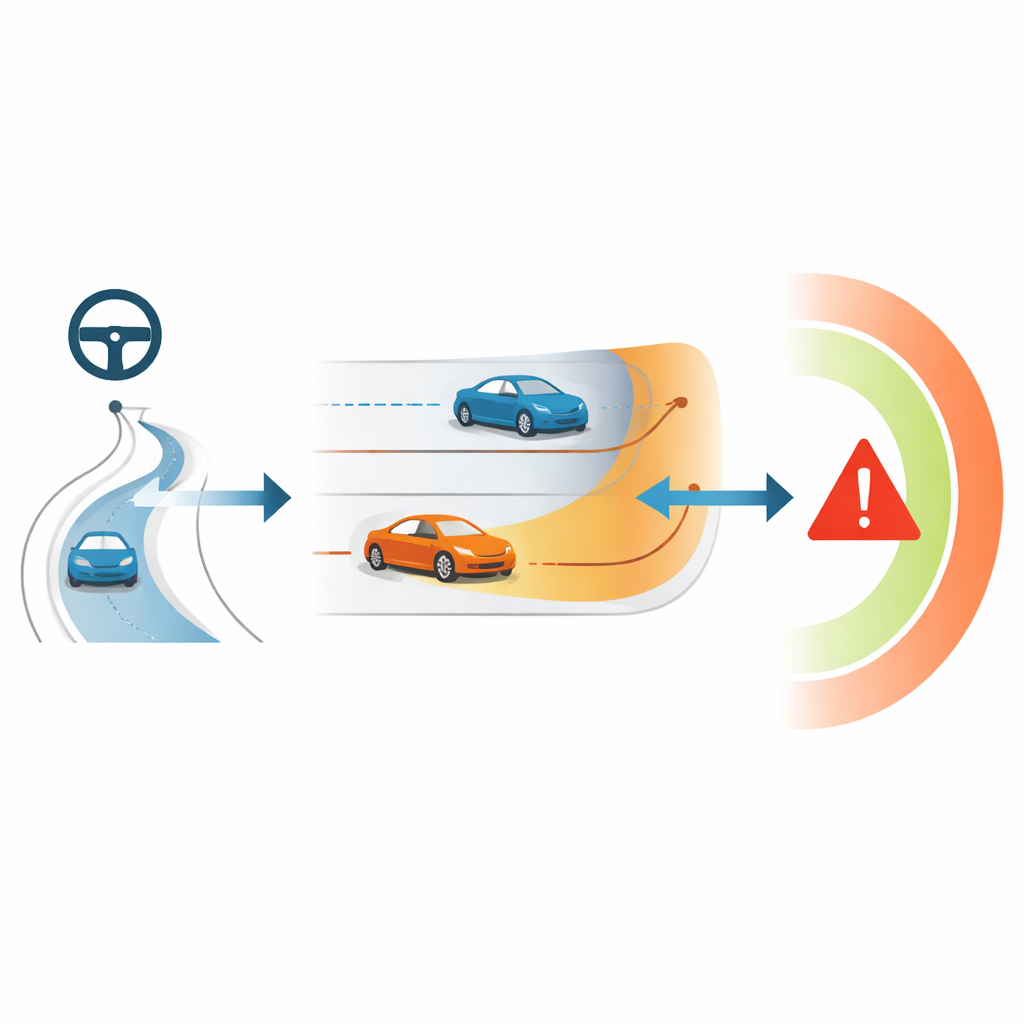
A medida de segurança-chave neste trabalho é a diferença entre os dois observadores. Quando o carro opera em um regime suave e previsível, o modelo de aprendizado e o modelo físico concordam de perto, e essa diferença permanece pequena. À medida que o veículo se aproxima de condições mais extremas — como mudanças de faixa rápidas em alta velocidade, perda súbita de aderência ou saturação da direção — o modelo de aprendizado detecta comportamentos que o modelo simples não consegue capturar, e a diferença aumenta. Os autores agregam essas diferenças em um único valor, que pode ser imaginado como o comprimento de um vetor dentro de uma "bolha" de segurança. Enquanto o valor permanecer dentro de um limite interno escolhido, o movimento é considerado seguro; quando ultrapassa esse limite, o sistema sinaliza uma situação crítica de segurança.
Submetendo o método ao teste
Os pesquisadores primeiro testam a abordagem em simulações computacionais onde um carro virtual segue uma estrada curva em velocidades variáveis. Eles mostram que o observador combinado mantém erros de estimação baixos enquanto sinaliza de forma clara os momentos em que o carro é exigido e seu acompanhamento lateral se degrada. Em seguida, passam para experimentos no mundo real usando um veículo de teste autônomo em um circuito de provas, incluindo um "teste do alce" padronizado com mudança súbita de faixa. Ao escolher cuidadosamente quais sinais de sensores e quanta história recente alimentar no modelo de aprendizado, eles melhoram a precisão da estimação e demonstram que o índice de segurança acende de forma confiável durante movimentos arriscados e permanece calmo caso contrário. Medidas estatísticas confirmam que o observador auxiliado por aprendizado melhorado reduz os erros de estimação em mais da metade em comparação com uma configuração mais simples.
O que isso significa para a condução do dia a dia
Para um público não especialista, a conclusão é que esse método dá aos carros autônomos um senso mais nuançado de quando estão se aproximando do limite. Em vez de apenas perguntar "O carro ainda está estável?", o sistema também pergunta "Ele ainda está performando como esperado, ou começando a se afastar do plano?" Ao comparar um modelo físico sólido com um modelo de aprendizado flexível, o carro pode detectar perigo mais cedo, mesmo quando seu movimento ainda parece aceitável superficialmente. Os autores mostram que essa avaliação de segurança pode rodar junto aos controladores existentes hoje e poderia, em trabalhos futuros, alimentar direta e automaticamente decisões de direção e frenagem para manter veículos automatizados mais seguros em emergências reais e súbitas.
Citação: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Palavras-chave: segurança em condução autônoma, dinâmica lateral do veículo, aprendizado por reforço, estimação de estado, sistemas de assistência ao motorista