Clear Sky Science · sv
Lärande-stött observatordesign för att förbättra självkörande fordons säkerhet
Varför smartare säkerhet är viktigt för självkörande bilar
När bilar tar över mer av körningen måste de behålla kontrollen även vid plötsliga undanmanövrar, hal väglag eller däckproblem. Dagens system kan avgöra om en bil uppenbart är ur kontroll, men har ofta svårt att upptäcka det gråområdet där bilen tekniskt sett är stabil men inte längre följer den avsedda banan bra. Denna artikel presenterar ett nytt sätt för självkörande bilar att övervaka sitt eget beteende i realtid, och upptäcka både fullständig förlust av stabilitet och subtil försämring i prestanda innan de utvecklas till olyckor.
Att observera hur en bil verkligen rör sig
Kärnidén är att fokusera på hur bilen faktiskt rör sig sidledes när den svänger eller byter fil. Ingenjörer följer storheter som hur snabbt bilen roterar, hur snabbt den glider sidledes och hur långt den avviker från den planerade banan. Dessa mäts inte alla direkt av sensorer, så de måste uppskattas. Författarna bygger en "observatör"—en mjukvarukomponent som övervakar rattutslag, hastighet och position och sedan rekonstruerar fordonets dolda rörelse. Om denna observatör kan följa den verkliga rörelsen nära, kan den fungera som bilens inre öga för säkerhet.
Att blanda fysik och inlärning
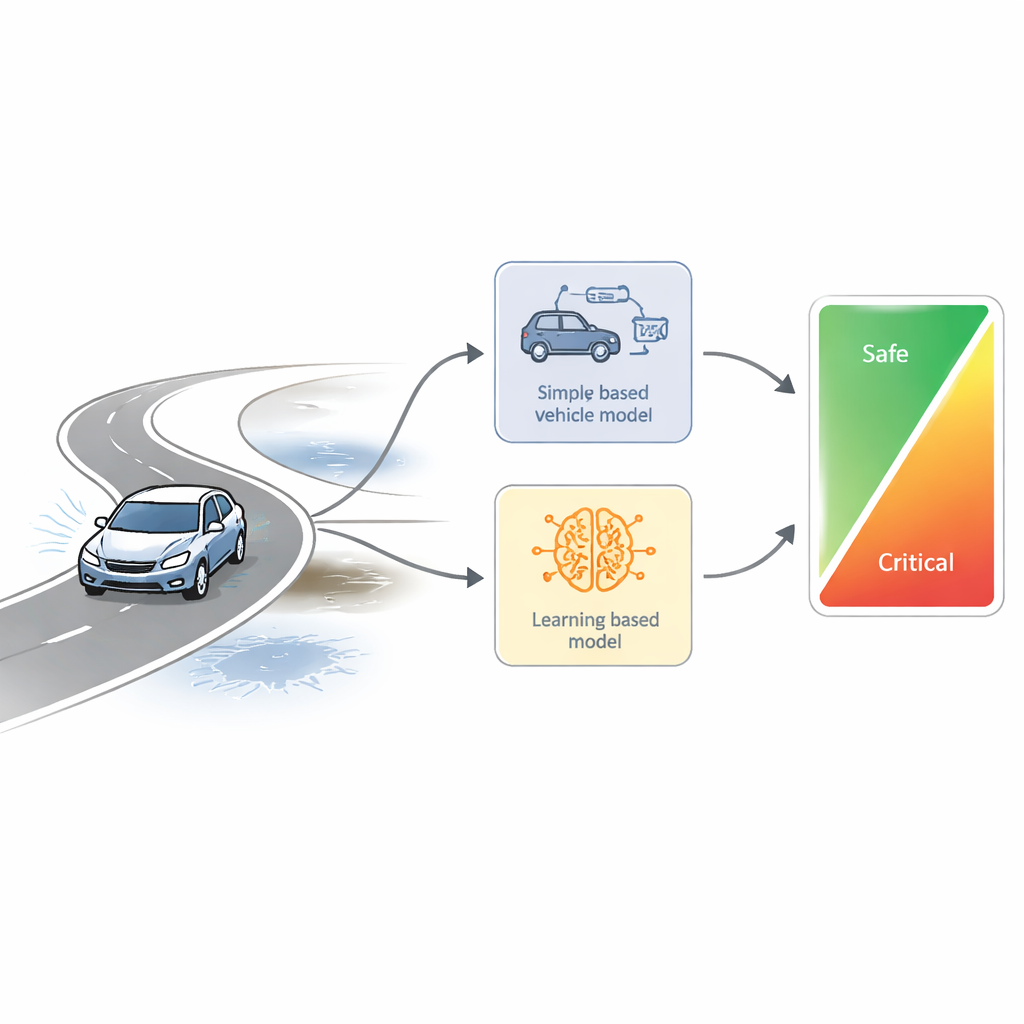
I stället för att förlita sig på en enda modell kombinerar den nya observatören två mycket olika synsätt på bilen. En syn är en traditionell fysikbaserad modell som behandlar fordonet som en förenklad cykelmodell: den använder massa, tröghetsmoment och däckstyvhet för att förutsäga hur bilen bör bete sig. Denna modell är robust och väl förstådd men mindre exakt när bilen pressas till sina gränser. Den andra synen är en inlärningsbaserad modell tränad med förstärkningsinlärning, som lär sig från många körexempel hur bilen faktiskt reagerar, särskilt i hårda kurvor och andra icke-linjära situationer. Genom att köra båda observatörerna parallellt jämför systemet vad den enkla fysiken förutspår med vad inlärningsmodellen förväntar sig under verkliga förhållanden.
Att omvandla oenighet till ett säkerhetssignal
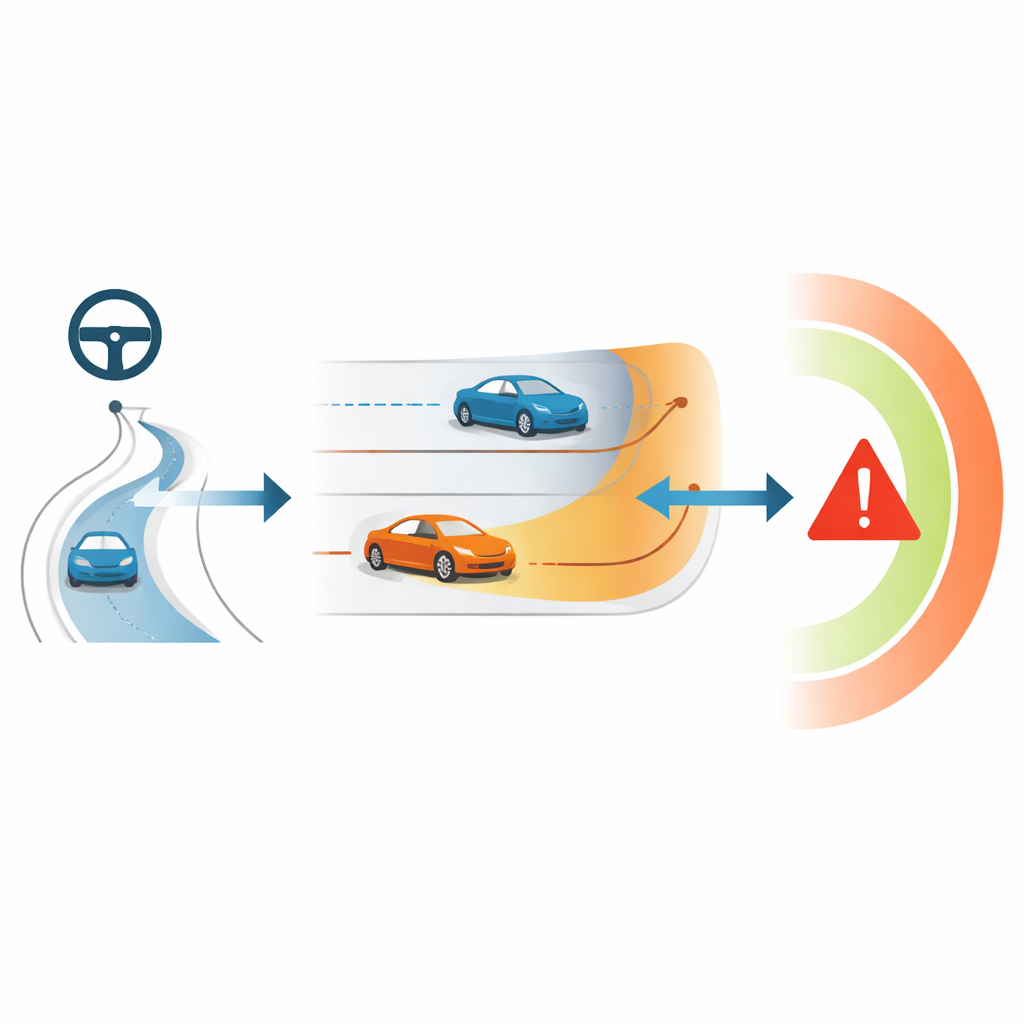
Den centrala säkerhetsmätaren i detta arbete är skillnaden mellan de två observatörerna. När bilen körs i ett milt, förutsägbart regime är inlärningsmodellen och fysikmodellen nära överens och denna skillnad förblir liten. När bilen närmar sig mer extrema förhållanden—såsom snabba filbyten i hög hastighet, plötslig förlust av grepp eller rattbegränsning—upptäcker inlärningsmodellen beteenden som den enkla modellen inte kan fånga, och skillnaden växer. Författarna samlar dessa skillnader till ett enda värde, som kan föreställas som längden på en vektor inuti en säker "bubbla". Så länge värdet stannar inom en vald inre gräns betraktas rörelsen som säker; när det överskrider den gränsen markerar systemet en säkerhetskritisk situation.
Sätta metoden på prov
Forskarna testar först sin metod i datorbaserade simuleringar där en virtuell bil följer en kurvig väg i varierande hastigheter. De visar att den kombinerade observatören håller estimeringsfelen små samtidigt som den tydligt signalerar tillfällen då bilen pressas hårt och dess laterala följsamhet försämras. Därefter går de över till verkliga experiment med ett självkörande testfordon på en provbana, inklusive ett standardiserat "älgtest" med ett plötsligt filbyte. Genom att noggrant välja vilka sensorsignaler och hur mycket nyligen historik som matas in i inlärningsmodellen förbättrar de dess estimeringsnoggrannhet och visar att säkerhetsindexet tillförlitligt aktiveras under riskfyllda manövrer och förblir lugnt i övrigt. Statistiska mått bekräftar att den förbättrade lärandestödda observatören halverar estimeringsfelen jämfört med en enklare lösning.
Vad detta betyder för vardagskörning
För en icke-specialist är slutsatsen att denna metod ger självkörande bilar en mer nyanserad uppfattning om när de närmar sig gränsen. I stället för att bara fråga "Är bilen fortfarande stabil?" frågar systemet också "Presterar den fortfarande som förväntat, eller börjar den glida bort från planen?" Genom att jämföra en robust fysikmodell med en flexibel inlärningsmodell kan bilen upptäcka fara tidigare, även när rörelsen fortfarande ser acceptabel ut vid första anblick. Författarna visar att denna säkerhetsbedömning kan köras parallellt med befintliga reglerare idag och i framtida arbete kan kopplas direkt tillbaka till styr- och bromsbeslut för att göra automatiserade fordon säkrare i plötsliga, verkliga nödsituationer.
Citering: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Nyckelord: självkörande fordon säkerhet, fordonets lateral dynamik, förstärkningsinlärning, tillståndsestimering, förarstödsystem