Clear Sky Science · ja
自動運転車の安全性向上のための学習支援オブザーバ設計
より“賢い”安全性が自動運転車にとって重要な理由
車が運転の多くを引き受けるようになるにつれて、急なハンドル操作、滑りやすい路面、タイヤの問題といった状況でも制御を保つ必要が出てきます。現行システムは車両が明らかに制御を失っているかどうかを判断できますが、車両が技術的には安定していても意図した軌跡から外れ始めているようなグレーゾーンを検出するのは苦手です。本論文は、自動運転車が実時間で自らの挙動を監視し、明白な安定性喪失と、事故につながる前の微妙な性能低下の両方を検出する新しい方法を示します。
車が実際にどう動いているかを観察する
核となる考え方は、車が曲がるときや車線変更をするときに横方向にどう動くかに着目することです。エンジニアは車の回転速度、横滑りの速度、計画軌跡からのずれといった量を追跡します。これらはすべてセンサーで直接測定できるわけではないので推定が必要です。著者らは「オブザーバ」を構築します。これは、ステアリング入力、速度、位置を監視して車両の隠れた動きを再構築するソフトウェアです。このオブザーバが実際の動きに忠実に追従できれば、安全のための内的な目として機能します。
物理モデルと学習の融合
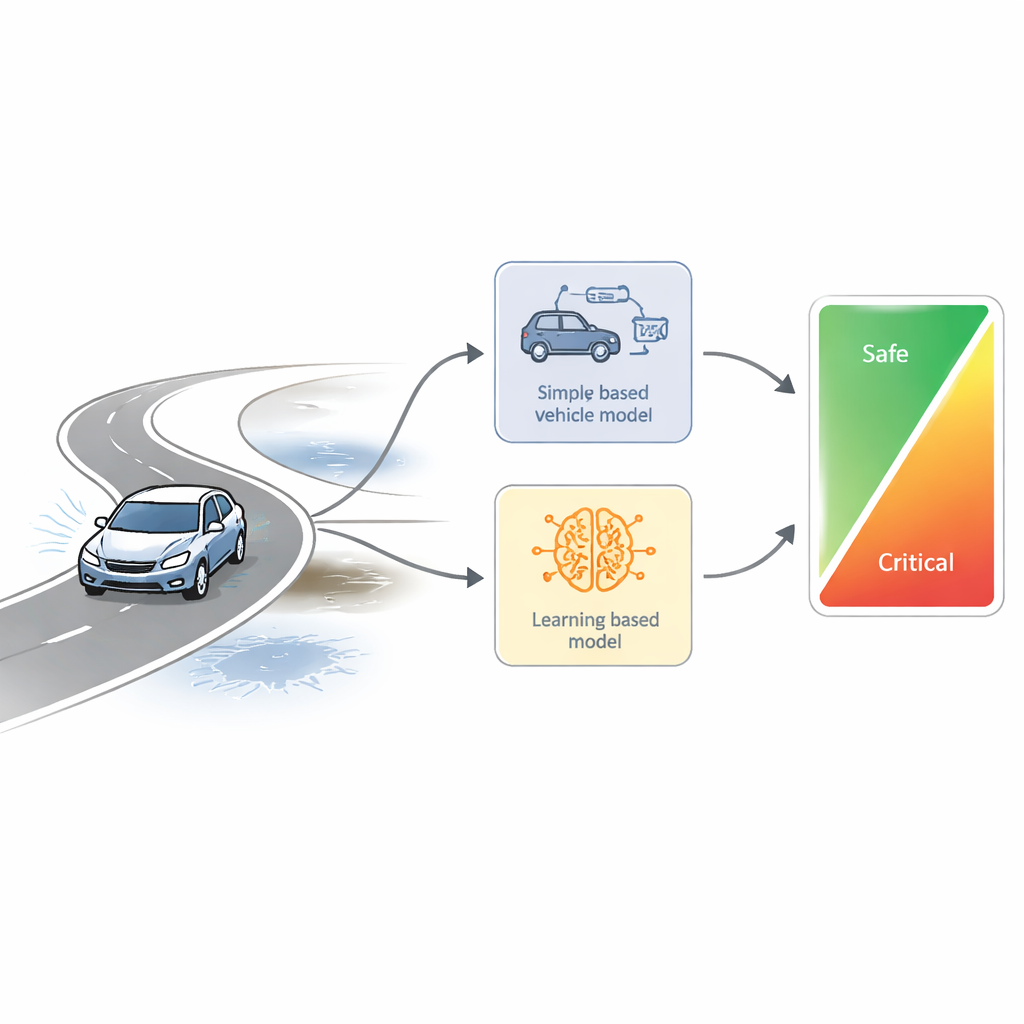
単一のモデルに依存する代わりに、新しいオブザーバは車両に対する二つの異なる見方を組み合わせます。一方は車両を簡略化したバイクモデルのように扱う伝統的な物理ベースのモデルで、質量や慣性、タイヤ剛性を使って車がどう振る舞うべきかを予測します。このモデルは頑健で理解が進んでいますが、限界領域では精度が落ちます。もう一方は強化学習で訓練された学習ベースのモデルで、多数の走行例から特に急な旋回や非線形な状況で車が実際にどう反応するかを学習します。二つのオブザーバを並列に動かすことで、単純な物理モデルの予測と学習モデルの期待する挙動を実世界条件下で比較します。
不一致を安全のシグナルに変える
本研究での重要な安全指標は、二つのオブザーバ間の差異です。穏やかで予測可能な領域では、学習モデルと物理モデルはよく一致し、この差は小さく保たれます。しかし、車がより極端な条件、たとえば高速での急な車線変更、突然のグリップ低下、またはステアリングの飽和に近づくと、学習モデルは単純モデルでは捉えられない挙動を検出し、差が大きくなります。著者らはこれらの差を一つの値に集約し、それを安全な“バブル”の内部にあるベクトルの長さとして表現します。その値が選ばれた内側の限度内にとどまる限り運動は安全とみなされ、限度を超えるとシステムは安全上の危機を警告します。
手法の検証
研究者たちはまず、仮想車両が変化する速度で曲がりくねった道路を走るコンピュータシミュレーションで手法を検証します。結合オブザーバが推定誤差を小さく保ちつつ、車が強い外力を受け横方向追従が劣化する瞬間を明確に知らせることを示します。次に、標準化された急な車線変更を伴う“ヘラジカテスト(ムーステスト)”を含む実験場での自律試験車による実車実験に移行します。どのセンサー信号を用い、どれだけの最近の履歴を学習モデルに入力するかを注意深く選ぶことで、推定精度が向上し、安全指標が危険な動作時に確実に検出され、他の状況では落ち着いていることを示します。統計的指標は、学習支援オブザーバが単純な構成と比べて推定誤差を半分以上削減することを裏付けます。
日常の運転にとっての意義
専門外の読者への結論は、この手法が自動運転車に対し「限界に近づいている」ことをより精緻に感じ取らせるという点です。単に「車はまだ安定しているか?」と問うだけでなく、「期待どおりに動いているか、それとも計画からずれ始めているか?」も問います。頑健な物理モデルと柔軟な学習モデルを比較することで、表面的には許容範囲に見える運動でも早期に危険を検出できます。著者らはこの安全評価が現在の制御器と並行して動作可能であり、将来的にはステアリングやブレーキの判断に直接フィードバックして突発的な実世界の緊急事態で自動車をより安全に保つために使える可能性があると示しています。
引用: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
キーワード: 自動運転の安全性, 車両横方向ダイナミクス, 強化学習, 状態推定, 運転支援システム