Clear Sky Science · fr
Conception d’un observateur assisté par apprentissage pour améliorer la sécurité des véhicules autonomes
Pourquoi une sécurité plus intelligente compte pour les voitures autonomes
À mesure que les véhicules prennent en charge une plus grande part de la conduite, ils doivent rester sous contrôle même lors d’évits soudains, de routes glissantes ou de problèmes de pneumatiques. Les systèmes actuels savent détecter quand une voiture est manifestement hors de contrôle, mais peinent souvent à repérer la zone grise où le véhicule est techniquement stable tout en s’écartant progressivement de la trajectoire prévue. Cet article présente une nouvelle méthode permettant aux voitures autonomes de surveiller leur comportement en temps réel, détectant à la fois une perte de stabilité franche et une dégradation plus subtile des performances avant qu’elles ne mènent à un accident.
Observer le véritable mouvement du véhicule
L’idée centrale est de se concentrer sur la façon dont la voiture se déplace latéralement lors d’un virage ou d’un changement de voie. Les ingénieurs suivent des grandeurs telles que la vitesse de rotation du véhicule, la vitesse latérale et l’écart par rapport à la trajectoire planifiée. Ces grandeurs ne sont pas toutes mesurées directement par des capteurs, elles doivent donc être estimées. Les auteurs construisent un « observateur » — un logiciel qui examine les commandes de direction, la vitesse et la position, puis reconstruit le mouvement caché du véhicule. Si cet observateur suit fidèlement le mouvement réel, il peut servir d’œil intérieur du véhicule pour la sécurité.
Mêler physique et apprentissage
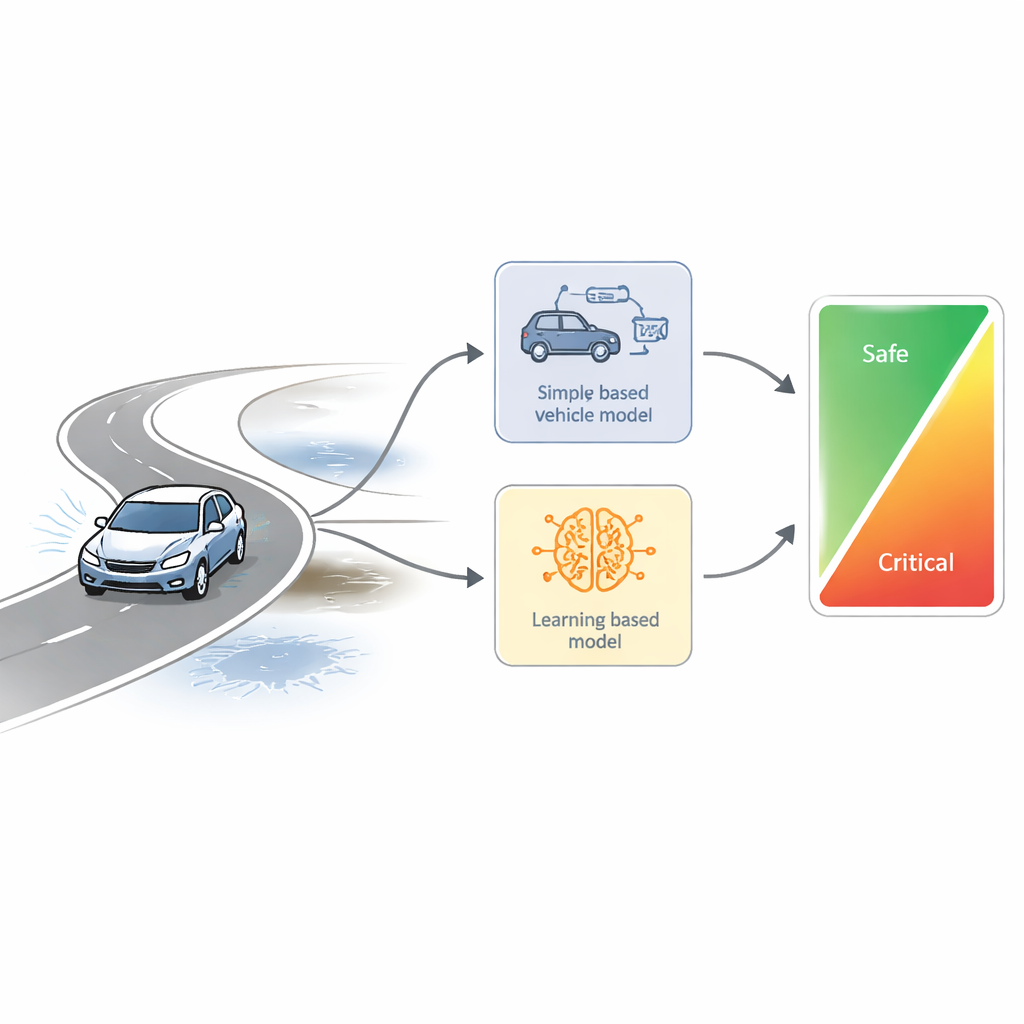
Plutôt que de s’appuyer sur un seul modèle, le nouvel observateur combine deux visions très différentes du véhicule. L’une est un modèle traditionnel fondé sur la physique qui assimile le véhicule à un vélo simplifié : il utilise la masse, l’inertie et la raideur des pneumatiques pour prédire le comportement. Ce modèle est robuste et bien compris, mais moins précis lorsque la voiture est poussée à ses limites. L’autre vision est un modèle basé sur l’apprentissage formé par apprentissage par renforcement, qui apprend à partir de nombreux exemples de conduite comment le véhicule réagit réellement, en particulier dans les virages serrés et autres situations non linéaires. En faisant fonctionner les deux observateurs en parallèle, le système compare ce que prédit le modèle physique simple avec ce que le modèle appris attend dans des conditions réelles.
Transformer le désaccord en signal de sécurité
La mesure de sécurité clé de ce travail est la différence entre les deux observateurs. Lorsque le véhicule évolue dans un régime doux et prévisible, le modèle appris et le modèle physique sont proches l’un de l’autre et cette différence reste faible. À mesure que la voiture approche de conditions plus extrêmes — par exemple des changements de voie brusques à grande vitesse, une perte d’adhérence soudaine ou une saturation de la direction — le modèle appris détecte des comportements que le modèle simple ne peut pas capturer, et la différence augmente. Les auteurs agrègent ces différences en une valeur unique, que l’on peut imaginer comme la longueur d’un vecteur à l’intérieur d’une « bulle » de sécurité. Tant que la valeur reste en deçà d’un seuil interne choisi, le mouvement est considéré comme sûr ; lorsqu’elle le franchit, le système signale une situation critique pour la sécurité.
Évaluer la méthode
Les chercheurs testent d’abord leur approche en simulation informatique où une voiture virtuelle suit une route courbe à des vitesses variables. Ils montrent que l’observateur combiné maintient de faibles erreurs d’estimation tout en signalant clairement les moments où la voiture est fortement sollicitée et où son suivi latéral se dégrade. Ensuite, ils passent à des expériences en conditions réelles avec un véhicule d’essai autonome sur un terrain d’essai, y compris un « test de l’élan du cerf » standardisé avec un changement de voie soudain. En choisissant soigneusement les signaux capteurs et la longueur d’historique à fournir au modèle appris, ils améliorent sa précision d’estimation et démontrent que l’indice de sécurité s’active de manière fiable lors de mouvements à risque et reste calme autrement. Des mesures statistiques confirment que l’observateur assisté par apprentissage réduit les erreurs d’estimation de plus de moitié par rapport à une configuration plus simple.
Ce que cela change pour la conduite de tous les jours
Pour un non-spécialiste, l’essentiel est que cette méthode offre aux voitures autonomes une perception plus nuancée de leur proximité avec la limite. Plutôt que de se contenter de demander « la voiture est-elle encore stable ? », le système s’interroge aussi : « fonctionne-t-elle toujours comme prévu, ou commence-t-elle à s’écarter du plan ? » En comparant un modèle physique solide avec un modèle d’apprentissage flexible, la voiture peut détecter le danger plus tôt, même lorsque son mouvement semble encore acceptable en surface. Les auteurs montrent que cette évaluation de la sécurité peut fonctionner en parallèle des régulateurs existants aujourd’hui et pourrait, dans des travaux futurs, être renvoyée directement aux décisions de direction et de freinage pour rendre les véhicules automatisés plus sûrs lors d’urgences réelles et soudaines.
Citation: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Mots-clés: sécurité de la conduite autonome, dynamique latérale des véhicules, apprentissage par renforcement, estimation d’état, systèmes d’assistance au conducteur