Clear Sky Science · pl
Projekt obserwatora wspomaganego uczeniem w celu poprawy bezpieczeństwa pojazdów autonomicznych
Dlaczego inteligentniejsze bezpieczeństwo ma znaczenie dla samochodów autonomicznych
W miarę jak samochody przejmują coraz więcej zadań związanych z prowadzeniem, muszą utrzymywać kontrolę nawet podczas nagłych uników, na śliskiej nawierzchni czy przy problemach z oponami. Dzisiejsze systemy potrafią wykryć, gdy pojazd wyraźnie wymyka się spod kontroli, ale często mają problem z zauważeniem strefy szarości — gdy samochód technicznie jest stabilny, lecz coraz słabiej podąża za zamierzonym torem. W artykule przedstawiono nowy sposób, w jaki pojazdy autonomiczne mogą w czasie rzeczywistym monitorować własne zachowanie, wychwytując zarówno jawne utraty stabilności, jak i subtelne pogorszenia wykonania, zanim przerodzą się w wypadki.
Obserwowanie, jak samochód naprawdę się porusza
Główny pomysł polega na skupieniu się na tym, jak samochód faktycznie przemieszcza się w bok podczas skrętu lub zmiany pasa. Inżynierowie śledzą wielkości takie jak prędkość obrotowa pojazdu, szybkość bocznego poślizgu oraz odchylenie od zaplanowanej ścieżki. Nie wszystkie te wielkości są bezpośrednio mierzone przez czujniki, więc trzeba je oszacować. Autorzy tworzą "obserwator" — moduł oprogramowania, który na podstawie ruchu kierownicy, prędkości i pozycji rekonstruuje ukryte ruchy pojazdu. Jeżeli obserwator potrafi wiernie śledzić rzeczywiste zachowanie, może pełnić rolę wewnętrznego oka pojazdu dla celów bezpieczeństwa.
Łączenie fizyki z uczeniem
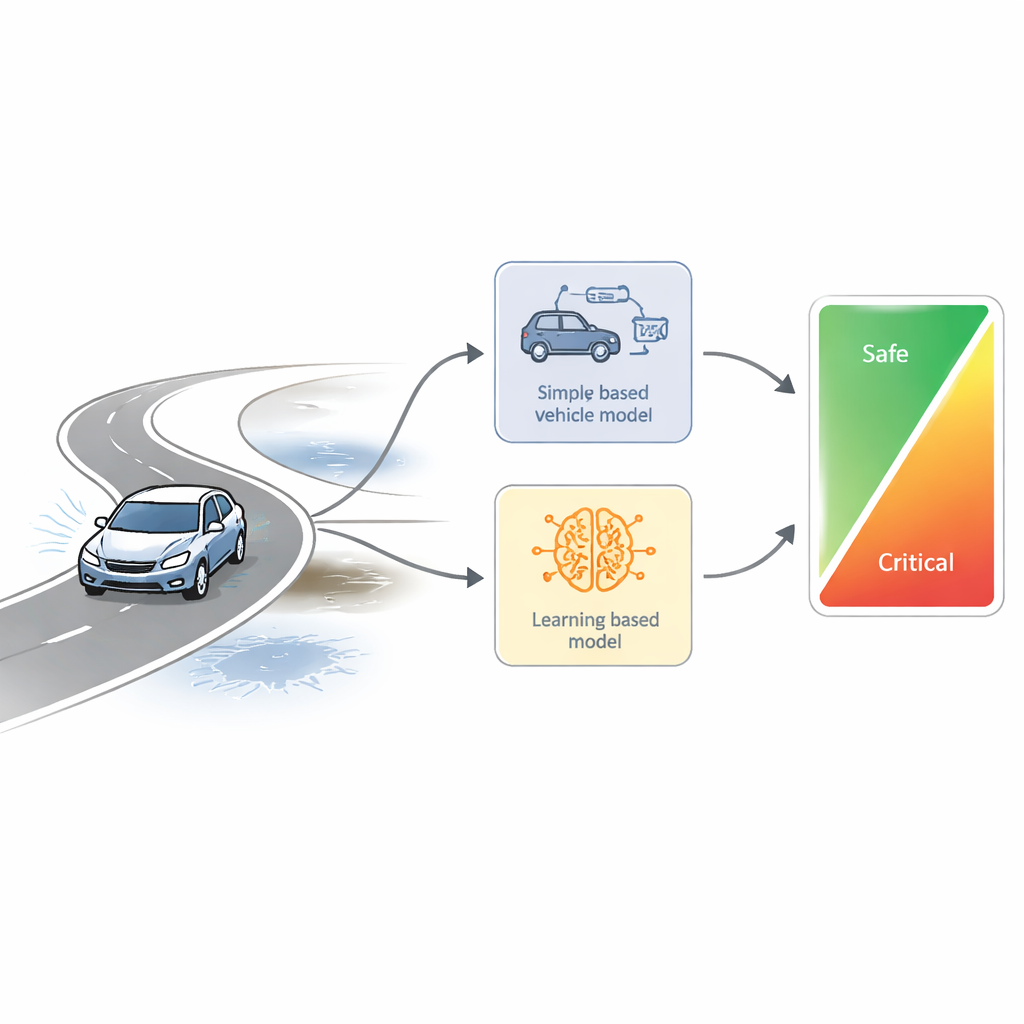
Zamiast polegać na jednym modelu, nowy obserwator łączy dwa bardzo różne spojrzenia na pojazd. Jedno to klasyczny model oparty na fizyce, traktujący pojazd jak uproszczony rower: używa masy, bezwładności i sztywności opon do przewidywania zachowania auta. Ten model jest solidny i dobrze poznany, lecz mniej dokładny, gdy pojazd jest eksploatowany na granicy możliwości. Drugie spojrzenie to model uczony, trenowany za pomocą uczenia ze wzmocnieniem, który na podstawie wielu przykładów jazdy uczy się, jak rzeczywiście reaguje samochód, szczególnie w ostrych skrętach i w innych nieliniowych sytuacjach. Uruchamiając oba obserwatory równolegle, system porównuje, co przewiduje prosty model fizyczny, z oczekiwaniami modelu uczonego w warunkach rzeczywistych.
Przemiana rozbieżności w sygnał bezpieczeństwa
Kluczową miarą bezpieczeństwa w tej pracy jest różnica między dwoma obserwatorami. Gdy samochód porusza się w łagodnym, przewidywalnym reżimie, model uczony i model fizyczny zgadzają się blisko, a ta różnica jest niewielka. W miarę zbliżania się do ekstremalnych warunków — takich jak ostre zmiany pasa przy dużej prędkości, nagła utrata przyczepności czy nasycenie układu kierowniczego — model uczony wychwytuje zachowania, których prosty model nie potrafi odwzorować, i rozbieżność rośnie. Autorzy zbierają te różnice w jedną wartość, którą można wyobrazić sobie jako długość wektora wewnątrz bezpiecznej „bańki”. Dopóki wartość pozostaje w obranym wewnętrznym limicie, ruch uznawany jest za bezpieczny; gdy go przekracza, system zgłasza sytuację krytyczną pod względem bezpieczeństwa.
Próby metody
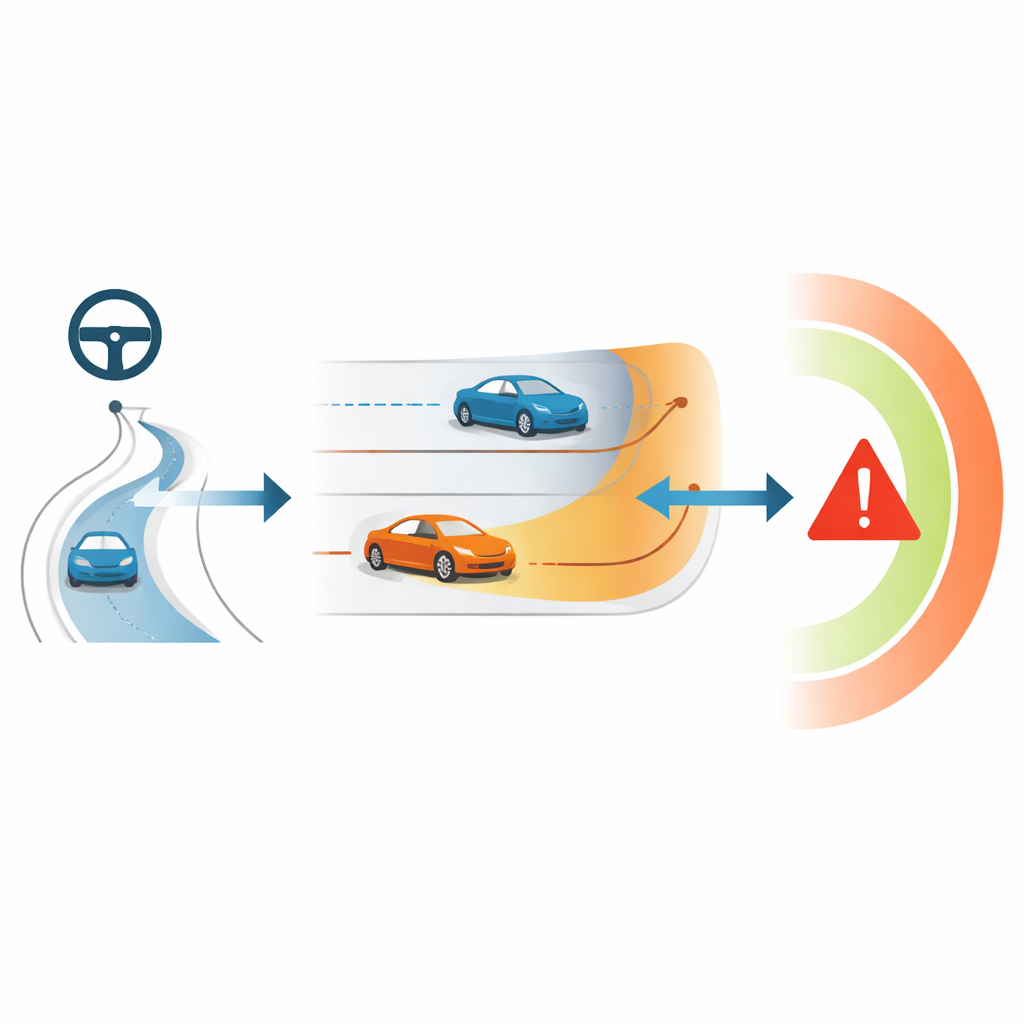
Badacze najpierw testują swoje podejście w symulacjach komputerowych, gdzie wirtualny samochód jedzie po krętej drodze przy zmiennej prędkości. Pokazują, że złożony obserwator utrzymuje błędy estymacji na niskim poziomie, jednocześnie wyraźnie sygnalizując momenty, gdy pojazd jest mocno eksploatowany i jego śledzenie boczne pogarsza się. Następnie przechodzą do eksperymentów w rzeczywistości z autonomicznym pojazdem testowym na poligonie, w tym ze standardowym „testem łosia” polegającym na nagłej zmianie pasa. Poprzez staranny dobór sygnałów z czujników i długości ostatniej historii podawanej do modelu uczonego poprawiają jego dokładność estymacji i wykazują, że indeks bezpieczeństwa niezawodnie się aktywuje podczas ryzykownych manewrów, a w innych chwilach pozostaje spokojny. Miary statystyczne potwierdzają, że obserwator wspomagany uczeniem zmniejsza błędy estymacji o ponad połowę w porównaniu z prostszym rozwiązaniem.
Co to oznacza dla codziennej jazdy
Dla osoby niebędącej specjalistą wniosek jest taki, że metoda daje samochodom autonomicznym bardziej wyrafinowane wyczucie, kiedy zbliżają się do granicy bezpieczeństwa. Zamiast pytać jedynie „Czy samochód nadal jest stabilny?”, system pyta też „Czy nadal wykonuje zadanie zgodnie z oczekiwaniami, czy zaczyna odchodzić od planu?”. Porównując solidny model fizyczny z elastycznym modelem uczonym, pojazd może wykryć niebezpieczeństwo wcześniej, nawet gdy ruch na powierzchni nadal wydaje się dopuszczalny. Autorzy pokazują, że ta ocena bezpieczeństwa może działać równolegle z istniejącymi regulatorami już dziś i że w przyszłości może być bezpośrednio sprzężona z decyzjami dotyczącymi kierowania i hamowania, aby utrzymać pojazdy zautomatyzowane w większym bezpieczeństwie w nagłych, rzeczywistych sytuacjach awaryjnych.
Cytowanie: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Słowa kluczowe: bezpieczeństwo jazdy autonomicznej, pionowe/dynamiczne zachowanie pojazdu, uczenie ze wzmocnieniem, estymacja stanu, systemy wspomagania kierowcy