Clear Sky Science · ru
Проект наблюдателя с поддержкой обучения для повышения безопасности автономных автомобилей
Почему умная безопасность важна для самоуправляемых машин
По мере того как автомобили берут на себя всё больше функций управления, им нужно оставаться контролируемыми даже при резких манёврах, скользкой дороге или проблемах с шинами. Современные системы умеют распознавать явную потерю управления, но часто с трудом замечают ту серую зону, где автомобиль формально остаётся устойчивым, но уже не следует задуманной траектории. В этой работе предложен новый способ для автономных машин отслеживать своё поведение в реальном времени, фиксируя как явную потерю устойчивости, так и тонкое ухудшение характеристик до того, как это приведёт к аварии.
Наблюдение за реальным движением автомобиля
Ключевая идея — сосредоточиться на том, как автомобиль фактически перемещается вбок при поворотах или перестроениях. Инженеры отслеживают такие величины, как угловая скорость вращения кузова, скорость бокового сноса и отклонение от планируемой траектории. Эти величины не все измеряются напрямую датчиками, поэтому их нужно оценивать. Авторы создают «наблюдатель» — программный модуль, который отслеживает команду руля, скорость и положение, а затем реконструирует скрытое движение автомобиля. Если этот наблюдатель точно следует за реальным движением, он может служить внутренним «глазом» системы безопасности автомобиля.
Сочетание физики и обучения
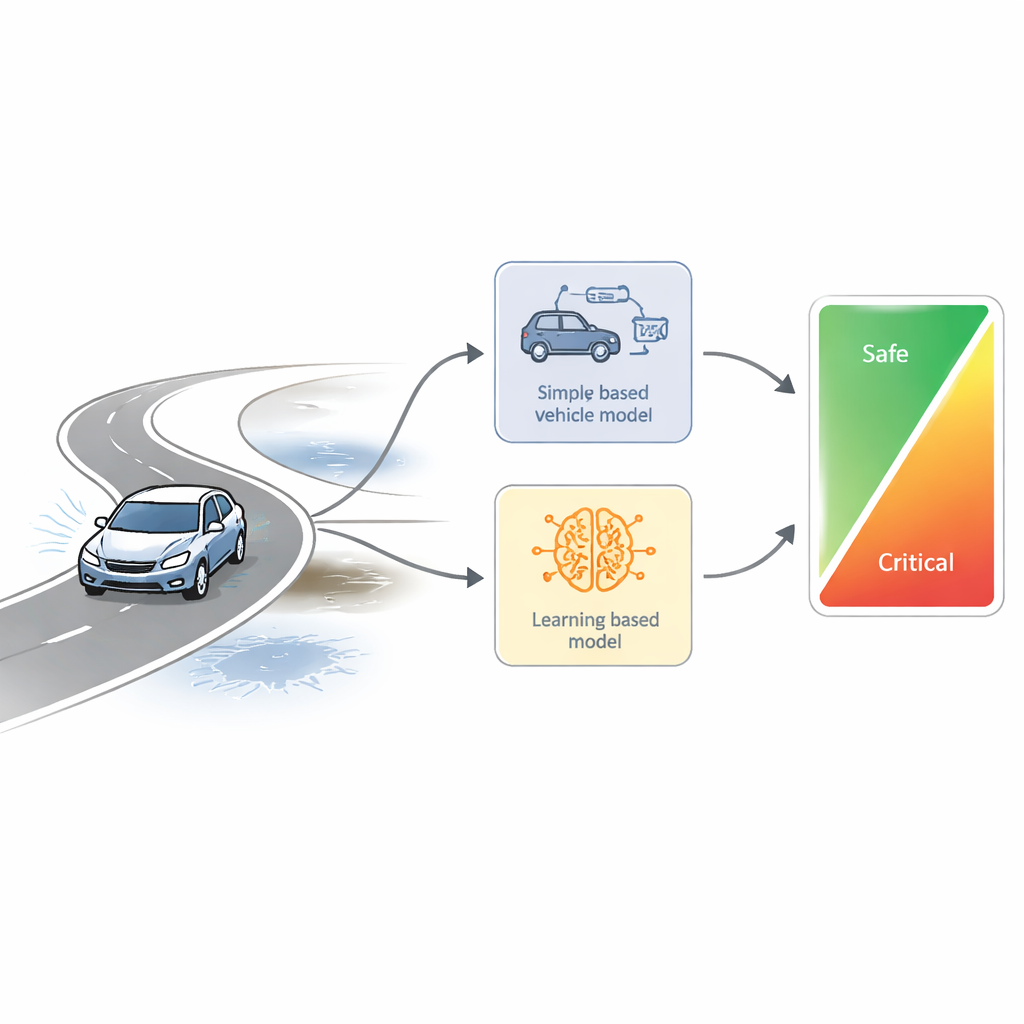
Вместо опоры на одну модель новый наблюдатель объединяет два принципиально разных представления о машине. Первое — традиционная физическая модель, упрощающая автомобиль до аналога велосипеда: она использует массу, инерцию и жёсткость шин для предсказания поведения. Такая модель надёжна и хорошо изучена, но менее точна, когда автомобиль работает на пределе возможностей. Второе представление — модель на основе обучения, обученная с использованием методов обучения с подкреплением; она усваивает по множеству примеров, как автомобиль действительно реагирует, особенно в жёстких поворотах и других нелинейных ситуациях. Запуская оба наблюдателя параллельно, система сопоставляет то, что предсказывает простая физика, и то, что ожидает обученная модель в реальных условиях.
Преобразование расхождения в сигнал безопасности
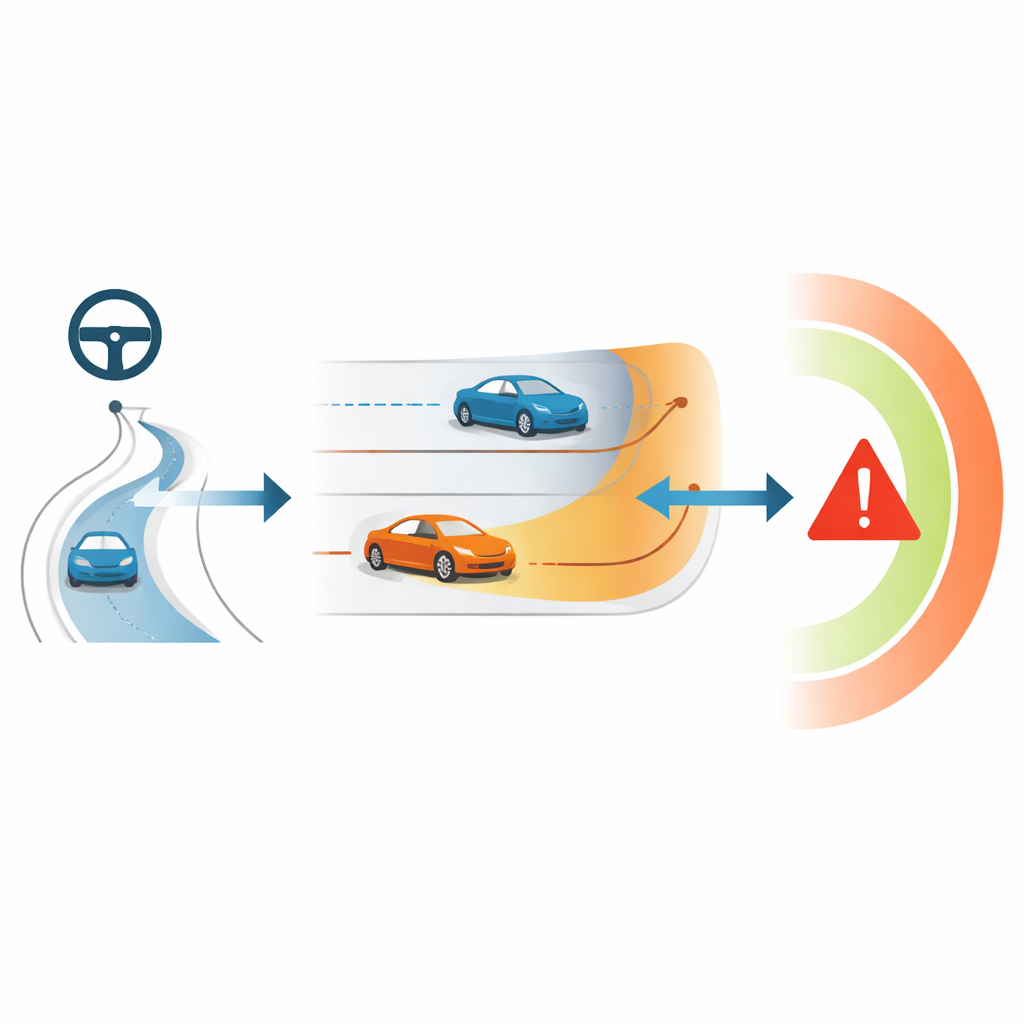
Ключевая мера безопасности в этой работе — разница между двумя наблюдателями. Когда автомобиль движется плавно и предсказуемо, обученная модель и физическая модель согласуются, и это расхождение остаётся малым. По мере приближения к более экстремальным условиям — например при резких перестроениях на высокой скорости, внезапной потере сцепления или насыщении управляющего воздействия — обученная модель фиксирует поведение, которое простая модель не в состоянии отразить, и расхождение растёт. Авторы сводят эти различия в единую величину, которую можно представить как длину вектора внутри безопасной «пузырьковой» области. Пока значение остаётся внутри выбранного внутреннего предела, движение считается безопасным; при его превышении система сигнализирует о ситуации, критичной для безопасности.
Проверка метода на практике
Исследователи сначала тестируют подход в компьютерных симуляциях, где виртуальный автомобиль следует по кривой дороге с меняющейся скоростью. Они показывают, что комбинированный наблюдатель удерживает ошибки оценки малыми и одновременно ясно сигнализирует моменты, когда автомобиль подвергается сильной нагрузке и ухудшается его латеральное слежение. Затем метод проверяют в реальных экспериментах на испытательном автомобиле на полигоне, включая стандартный «тест лося» с внезапным перестроением. Тщательно выбирая, какие сигналы датчиков и какой объём недавней истории подавать в модель обучения, они повышают точность её оценок и демонстрируют, что индекс безопасности надёжно срабатывает при рискованных манёврах и остаётся спокойным в остальных случаях. Статистические показатели подтверждают, что улучшенный наблюдатель с поддержкой обучения сокращает ошибки оценки более чем вдвое по сравнению с более простой схемой.
Что это значит для повседневного вождения
Для неспециалиста основной вывод таков: этот метод даёт автономным автомобилям более тонкое ощущение того, когда они приближаются к границе возможностей. Вместо того чтобы просто спрашивать «Остаётся ли автомобиль устойчивым?», система также задаёт вопрос «Выполняет ли он всё ещё ожидаемые действия или начинает отклоняться от плана?». Сравнивая надёжную физическую модель с гибкой моделью обучения, автомобиль может обнаруживать опасность раньше, даже когда по внешним признакам движение ещё кажется приемлемым. Авторы показывают, что эта оценка безопасности может работать параллельно с существующими контроллерами уже сегодня и в будущем может напрямую влиять на решения по рулевому управлению и торможению, чтобы сделать автономные транспортные средства безопаснее в внезапных реальных чрезвычайных ситуациях.
Цитирование: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Ключевые слова: безопасность автономного вождения, латеральная динамика автомобиля, обучение с подкреплением, оценка состояния, системы помощи водителю