Clear Sky Science · he
עיצוב צופה מוּסַע-למידה לשיפור בטיחות כלי רכב אוטונומיים
מדוע בטיחות חכמה יותר חשובה לרכבים עצמאים
כשמכוניות תופסות יותר ויותר מהנהיגה, הן חייבות להישאר בשליטה גם במהלך סטיות פתאומיות, כבישים חלקים או בעיות בצמיגים. המערכות של היום יכולות לזהות מקרים שבהם הרכב בלא-ספק מחוץ לשליטה, אך לעתים קרובות מתקשות להבחין באזור האפור שבו הרכב טכנית יציב אך כבר לא עוקב היטב אחרי המסלול המתוכנן. מאמר זה מציג שיטה חדשה שמאפשרת למכוניות אוטונומיות לנטר את התנהגותן בזמן אמת, ולגלות הן אובדן יציבות גמור והן אובדן ביצועים עדין לפני שהן הופכות לתאונה.
מעקב אחר התנועה האמיתית של הרכב
הרעיון המרכזי הוא להתמקד באופן שבו הרכב נע הצידה כאשר הוא פונה או משנה נתיב. מהנדסים עוקבים אחר כמויות כגון מהירות הסיבוב של הרכב, קצב ההחלקה הצידית, והמרחק ממנו לסטיה מהנתיב המתוכנן. לא כל אלה נמדדים ישירות על ידי חיישנים, ולכן יש לאמדן אותם. המחברים בונים "צופה" — רכיב תוכנה שמבצע מעקב אחרי פקודות ההיגוי, מהירות ומיקום, ואז משחזר את תנועת הרכב המוסתרת. אם הצופה יכול לעקוב אחרי התנועה האמיתית בצמוד, הוא יכול לשמש כ"עין הפנימית" של הרכב למטרות בטיחות.
מיזוג פיזיקה ולמידה
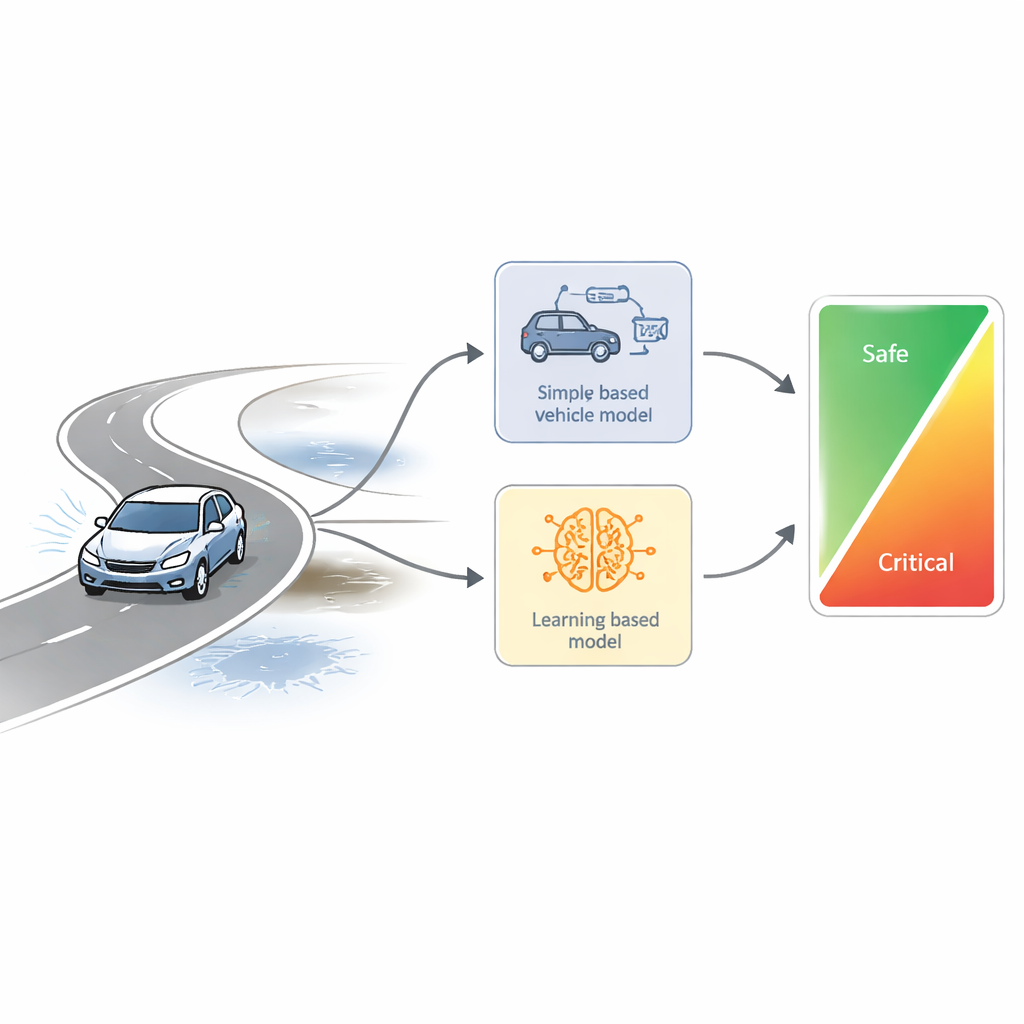
במקום להסתמך על מודל יחיד, הצופה החדש משלב שתי נקודות מבט שונות לחלוטין על הרכב. נקודת מבט אחת היא מודל מסורתי מבוסס-פיזיקה שמתייחס לכלי הרכב כאל אופניים מפושטות: הוא משתמש במסה, אינרציה וקשיחות הצמיגים כדי לחזות כיצד הרכב אמור להתנהג. מודל זה יציב ומובן היטב אך פחות מדויק כאשר הרכב נדחף לקצוות. נקודת המבט השנייה היא מודל מבוסס-למידה שאומן בלמידת חיזוק, שלומד ממגוון דוגמאות נהיגה כיצד הרכב מגיב בפועל, במיוחד בפניות חזקות ומצבים לא-ליניאריים. בהרצת שני הצופיות במקביל, המערכת משווה את מה שהפיזיקה הפשוטה חוזה עם מה שהמודל הלימודי מצפה בתנאי אמת.
הפיכת אי-הסכמה לאות בטיחות
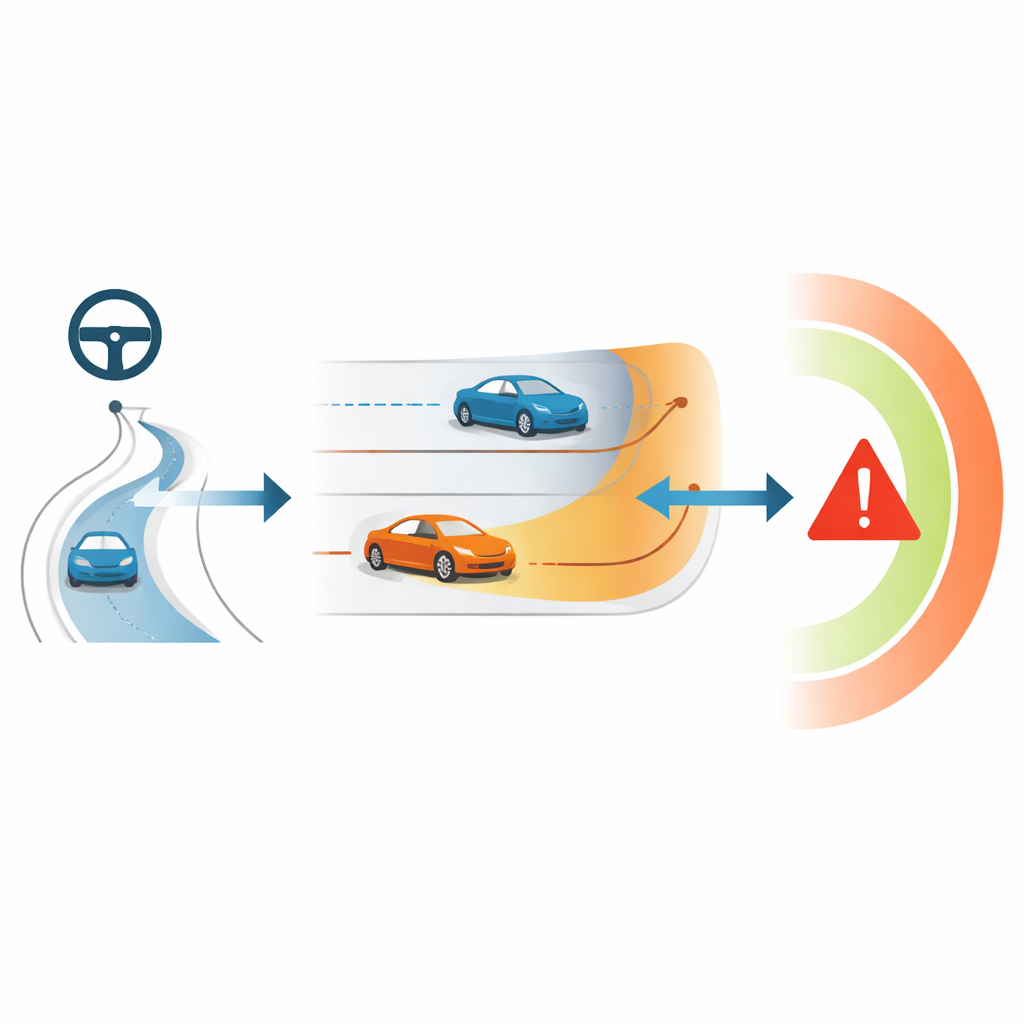
מדד הבטיחות המרכזי בעבודה זו הוא ההבדל בין שני הצופיות. כאשר הרכב פועל בתחום עדין וצפוי, המודל הלימודי והמודל הפיזיקלי מסכימים זה עם זה באופן הדוק, וההפרש נשאר קטן. ככל שהרכב מתקרב לתנאים קיצוניים יותר — כגון שינוי נתיב חדה במהירות גבוהה, אובדן אחיזה פתאומי או ריוויון הגה — המודל הלימודי מזהה התנהגות שהמודל הפשוט אינו מסוגל לתאר, וההפרש גדל. המחברים מרכזים את ההבדלים האלה לערך יחיד, שאפשר לדמיין אותו כאורכו של וקטור בתוך "בועת" בטיחות. כל עוד הערך נשאר בתוך גבול פנימי שנבחר, התנועה נחשבת בטוחה; כשהוא חוצה את הגבול, המערכת סומנת כמצב קריטי לבטיחות.
בדיקת השיטה במתודולוגיה
ראשית, החוקרים בוחנים את הגישה בסימולציות מחשב שבהן רכב וירטואלי עוקב אחרי כביש מפותל במהירויות משתנות. הם מראים שהצופה המשולב שומר על שגיאות אמדן נמוכות ובו-זמנית מספק איתותים ברורים ברגעים בהם הרכב נדחף חזק ועקיבת הרוחב שלו מתדרדרת. בהמשך הם עוברים לניסויים במציאות באמצעות רכב ניסוי אוטונומי במגרש בדיקות, כולל מבחן סטנדרטי של שינוי נתיב פתאומי ("מבחן האייל"). על ידי בחירה מדויקת של אותות חיישן וכמות ההיסטוריה האחרונה שנכנסת למודל הלימודי, הם משפרים את דיוק האמדן ומדגימים שהמדד הבטחוני נדלק באופן אמין במהלך תנועות מסוכנות ונשאר שקט אחרת. מדדים סטטיסטיים מאשרים שהצופה המוסע-למידה מפחית את שגיאות האמדן ביותר מחצי בהשוואה להגדרה פשוטה יותר.
מה המשמעות לנהיגה היומיומית
ללא-מומחה, המסקנה היא ששיטה זו מעניקה למכוניות אוטונומיות חוש מעודן יותר לזיהוי מתי הן מתקרבות לקצה. במקום לשאול רק "האם הרכב עדיין יציב?", המערכת שואלת גם "האם הוא עדיין פועל כפי שציפינו, או מתחיל להסטות מהתוכנית?" על ידי השוואת מודל פיזיקלי יציב למודל למידה גמיש, הרכב יכול לזהות סכנה מוקדם יותר, אפילו כאשר תנועתו נראית קבילה על פני השטח. המחברים מראים שהערכת הבטיחות הזו יכולה לפעול במקביל לבקרים קיימים היום, ובמחקר עתידי היא עשויה להזין חזרה ישירות להחלטות היגוי ובלימה כדי לשמור על כלי רכב אוטומטיים בטוחים יותר במצבי חירום פתאומיים במציאות.
ציטוט: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
מילות מפתח: בטיחות בנהיגה אוטונומית, דינמיקה רוחבית של כלי רכב, למידת חיזוק, אמדן מצבים, מערכות סיוע לנהג