Clear Sky Science · de
Lerngestützte Beobachterauslegung zur Verbesserung der Sicherheit autonomer Fahrzeuge
Warum schlauere Sicherheit für autonome Fahrzeuge wichtig ist
Wenn Autos immer mehr Fahraufgaben übernehmen, müssen sie auch bei plötzlichen Ausweichmanövern, rutschigen Straßen oder Reifenproblemen die Kontrolle behalten. Heutige Systeme erkennen meist deutliches Kontrollverlust, tun sich aber schwer damit, die Grauzone zu erfassen, in der das Fahrzeug formal noch stabil ist, aber nicht mehr der beabsichtigten Spur folgt. Dieses Paper stellt einen neuen Ansatz vor, mit dem autonome Fahrzeuge ihr eigenes Verhalten in Echtzeit überwachen und sowohl offensichtlichen Stabilitätsverlust als auch subtile Leistungsverschlechterung erkennen, bevor daraus ein Unfall wird.
Beobachten, wie sich ein Auto wirklich bewegt
Der Kerngedanke ist, sich darauf zu konzentrieren, wie sich das Fahrzeug seitlich bewegt, wenn es lenkt oder die Spur wechselt. Ingenieure verfolgen Größen wie die Rotationsgeschwindigkeit, die seitliche Ausbreitungsgeschwindigkeit und die Abweichung von der geplanten Bahn. Diese Größen werden nicht alle direkt gemessen und müssen daher geschätzt werden. Die Autoren entwickeln einen „Beobachter“ — eine Softwarekomponente, die Lenkbefehle, Geschwindigkeit und Position auswertet und die verborgene Fahrzeugbewegung rekonstruiert. Kann dieser Beobachter die tatsächliche Bewegung genau nachverfolgen, dient er als inneres Auge des Fahrzeugs für Sicherheitsfragen.
Physik und Lernen kombinieren
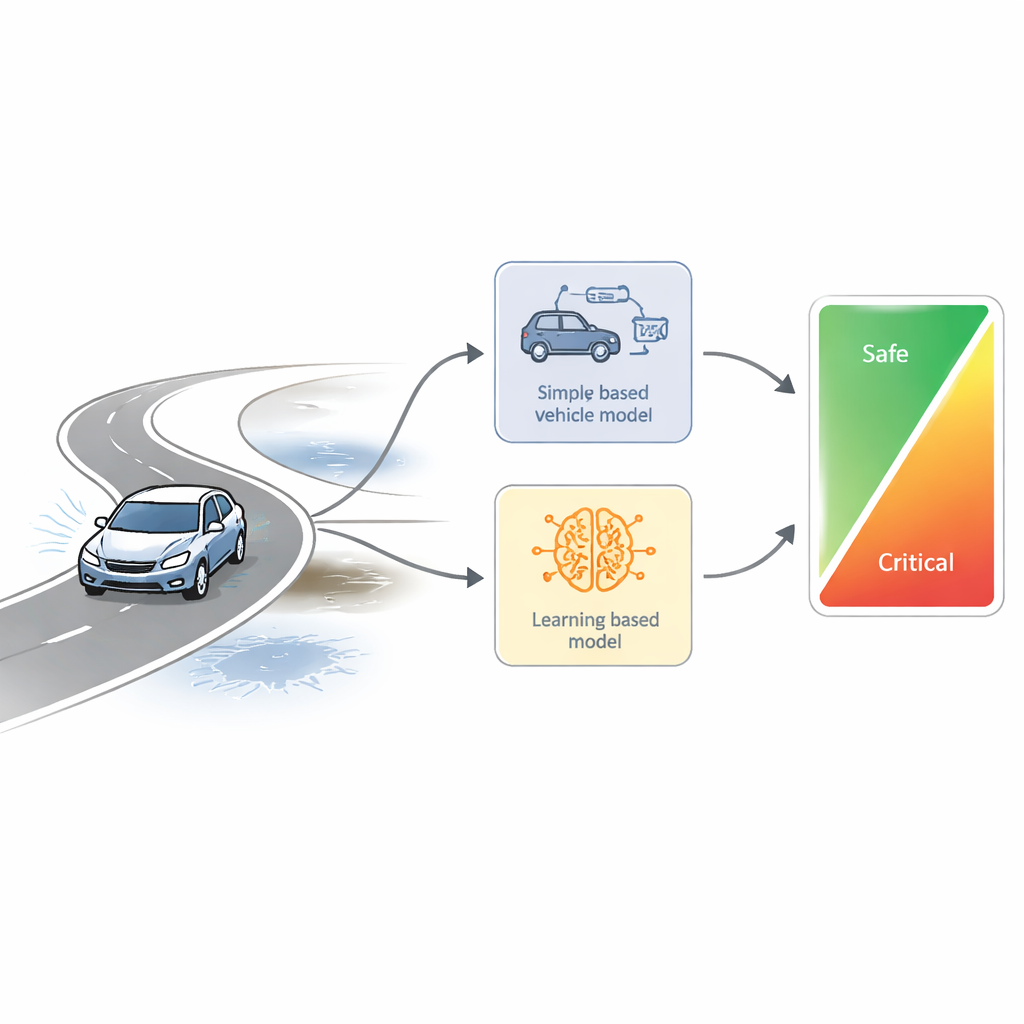
Statt sich auf ein einzelnes Modell zu verlassen, kombiniert der neue Beobachter zwei sehr unterschiedliche Sichtweisen auf das Fahrzeug. Die eine Sicht ist ein traditionelles physikbasiertes Modell, das das Fahrzeug vereinfacht wie ein Fahrradmodell behandelt: Es nutzt Masse, Trägheit und Reifensteifigkeit, um vorherzusagen, wie sich das Fahrzeug verhalten sollte. Dieses Modell ist robust und gut verstanden, liefert aber weniger genaue Vorhersagen, wenn das Fahrzeug an seine Grenzen kommt. Die zweite Sicht ist ein lernbasiertes Modell, das mit Reinforcement Learning trainiert wurde und aus vielen Fahrbeispielen lernt, wie das Fahrzeug tatsächlich reagiert — insbesondere in starken Kurven und anderen nichtlinearen Situationen. Indem beide Beobachter parallel laufen, vergleicht das System, was das einfache Physikmodell vorhersagt und was das Lernmodell unter realen Bedingungen erwartet.
Uneinigkeit als Sicherheitsindikator
Das zentrale Sicherheitsmaß dieses Ansatzes ist die Differenz zwischen den beiden Beobachtern. Bewegt sich das Fahrzeug in einem sanften, vorhersehbaren Bereich, stimmen Lern- und Physikmodell weitgehend überein und diese Differenz bleibt klein. Nähert sich das Fahrzeug extremeren Bedingungen — etwa scharfe Spurwechsel bei hoher Geschwindigkeit, plötzlicher Gripverlust oder Lenkeinschlagsbegrenzung — erkennt das Lernmodell Verhaltensweisen, die das einfache Modell nicht erfassen kann, und die Differenz wächst. Die Autoren fassen diese Differenzen zu einem einzigen Wert zusammen, den man sich als Länge eines Vektors innerhalb einer sicheren „Blase“ vorstellen kann. Solange der Wert innerhalb eines gewählten inneren Grenzwerts bleibt, gilt die Bewegung als sicher; überschreitet er diesen Wert, meldet das System eine sicherheitskritische Situation.
Praxisprüfung der Methode
Die Forschenden prüfen ihren Ansatz zunächst in Simulationen, in denen ein virtuelles Fahrzeug einer kurvigen Straße bei wechselnden Geschwindigkeiten folgt. Sie zeigen, dass der kombinierte Beobachter die Schätzfehler gering hält und gleichzeitig klar jene Momente signalisiert, in denen das Fahrzeug stark beansprucht wird und die laterale Spurhaltung nachlässt. Anschließend testen sie mit einem autonomen Versuchsfahrzeug auf einem Testgelände, einschließlich eines standardisierten „Elchtests“ mit plötzlichem Spurwechsel. Durch sorgfältige Auswahl der Sensorsignale und der Menge an kürzlichem Verlauf, die dem Lernmodell zugeführt wird, verbessern sie dessen Schätzgenauigkeit und zeigen, dass der Sicherheitsindex bei riskanten Manövern zuverlässig anschlägt und sonst ruhig bleibt. Statistische Auswertungen bestätigen, dass der lernunterstützte Beobachter die Schätzfehler im Vergleich zu einer einfacheren Konfiguration mehr als halbiert.
Was das für den Alltag bedeutet
Für Nichtfachleute lautet die Erkenntnis: Diese Methode verleiht autonomen Fahrzeugen ein nuancierteres Gespür dafür, wann sie an die Grenze stoßen. Anstatt nur zu fragen „Ist das Fahrzeug noch stabil?“, fragt das System zusätzlich: „Erfüllt es noch die erwartete Leistung, oder driftet es langsam vom Plan ab?“ Durch den Vergleich eines robusten Physikmodells mit einem flexiblen Lernmodell kann das Fahrzeug Gefahren früher erkennen, selbst wenn die Bewegung oberflächlich noch akzeptabel aussieht. Die Autoren zeigen, dass diese Sicherheitsbewertung heute parallel zu bestehenden Reglern laufen kann und in zukünftigen Arbeiten direkt in Lenk- und Bremsentscheidungen eingespeist werden könnte, um automatisierte Fahrzeuge in plötzlichen, realen Notlagen sicherer zu machen.
Zitation: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Schlüsselwörter: Sicherheit beim autonomen Fahren, laterale Fahrzeugbewegung, Reinforcement Learning, Zustandsschätzung, Fahrerassistenzsysteme