Clear Sky Science · nl
Observer-ontwerp met leermodel om de veiligheid van autonome voertuigen te verbeteren
Waarom slimmer veiligheidssysteem ertoe doet voor zelfrijdende auto’s
Naarmate auto’s steeds meer van het rijden overnemen, moeten ze ook bij plotselinge uitwijkmanoeuvres, gladde wegdekcondities of bandproblemen de controle behouden. Huidige systemen kunnen vaststellen wanneer een auto duidelijk buiten controle raakt, maar ze hebben vaak moeite om het grijze gebied te herkennen waarin de auto technisch gezien nog stabiel is maar niet langer nauwkeurig het beoogde traject volgt. Dit artikel presenteert een nieuwe manier waarop zelfrijdende voertuigen hun eigen gedrag in realtime kunnen monitoren, door zowel duidelijk verlies van stabiliteit als subtielere prestatieachteruitgang te detecteren voordat die tot ongevallen leiden.
Observeren hoe een auto zich werkelijk beweegt
Het kernidee is te focussen op hoe de auto zich zijwaarts beweegt bij bochten of baanwissels. Ingenieurs volgen grootheden zoals de draaisnelheid, de snelheid van zijwaartse wegglijding en de afwijking ten opzichte van het geplande pad. Deze grootheden worden niet allemaal direct door sensoren gemeten en moeten dus geschat worden. De auteurs bouwen een "observer" — software die stuurinput, snelheid en positie bewaakt en daarmee de verborgen voertuigbeweging reconstrueert. Als deze observer de werkelijke beweging nauwkeurig kan volgen, fungeert hij als het innerlijke oog van de auto voor veiligheidsdoeleinden.
Een mix van fysica en leren
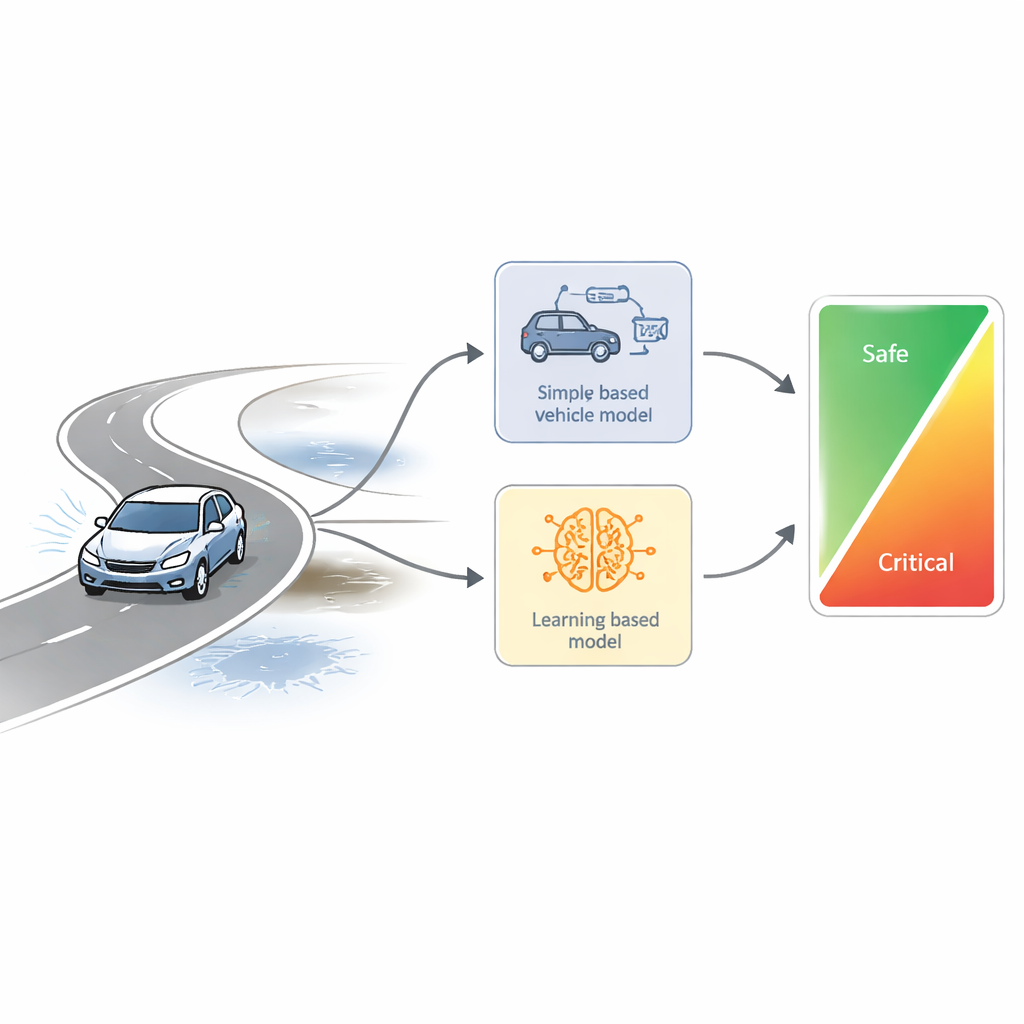
In plaats van op één enkel model te vertrouwen, combineert de nieuwe observer twee heel verschillende zienswijzen op het voertuig. De ene zienswijze is een traditioneel fysica-gebaseerd model dat het voertuig als een vereenvoudigde fiets voorstelt: het gebruikt massa, traagheid en bandstijfheid om te voorspellen hoe de auto zich zou moeten gedragen. Dit model is robuust en goed begrepen, maar minder nauwkeurig wanneer de auto tot het uiterste wordt gedreven. De tweede zienswijze is een leermodel dat met reinforcement learning is getraind en uit veel rijvoorbeelden leert hoe de auto zich daadwerkelijk gedraagt, vooral bij scherpe bochten en andere niet-lineaire situaties. Door beide observers parallel te laten draaien, vergelijkt het systeem wat het eenvoudige fysicamodel voorspelt met wat het leermodel onder realistische omstandigheden verwacht.
Van verschil naar een veiligheidsignaal
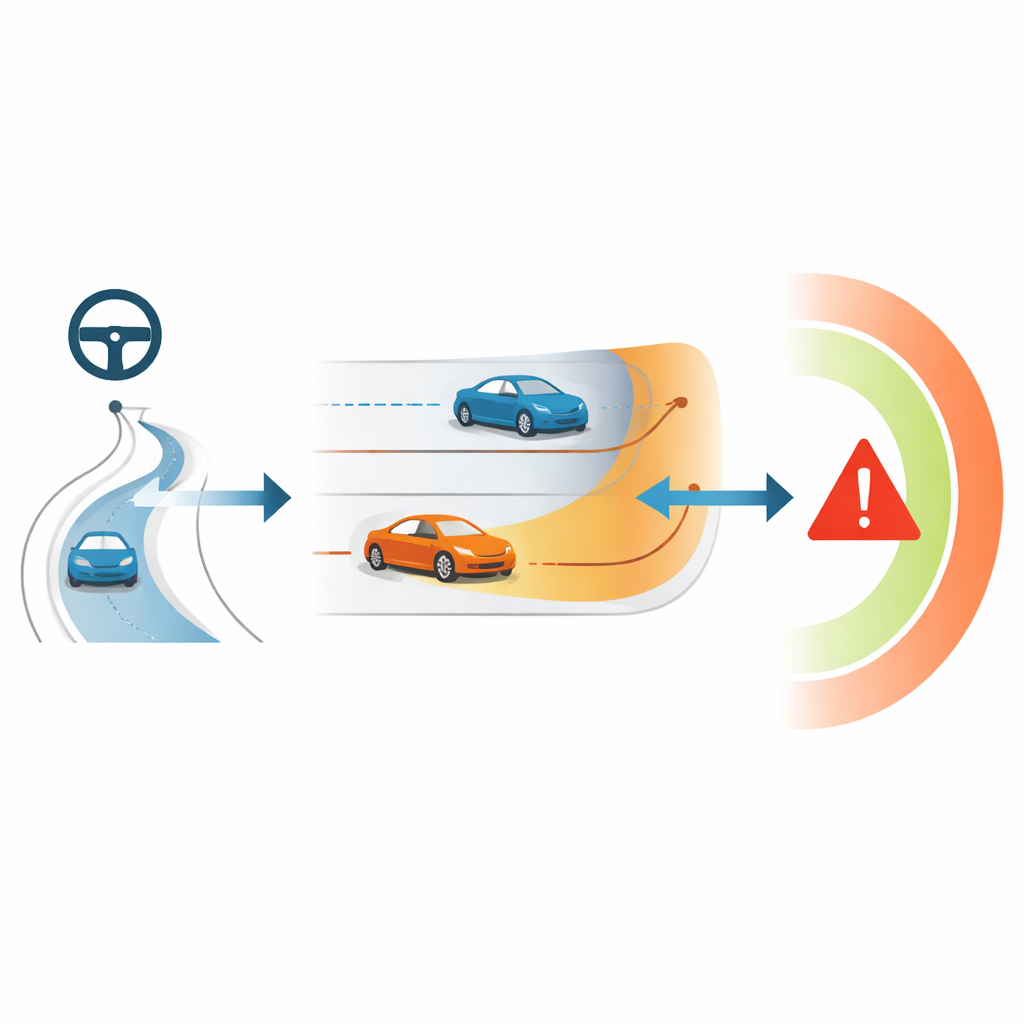
De belangrijkste veiligheidsmaat in dit werk is het verschil tussen de twee observers. Wanneer de auto in een rustig, voorspelbaar regime rijdt, stemmen het leermodel en het fysicamodel goed overeen en blijft dit verschil klein. Naarmate de auto extremere condities nadert — zoals scherpe baanwissels bij hoge snelheid, plotseling verlies van grip of stuursaturatie — detecteert het leermodel gedragingen die het eenvoudige model niet kan vastleggen, en neemt het verschil toe. De auteurs bundelen deze verschillen tot één waarde, die je kunt voorstellen als de lengte van een vector binnen een veilige "bel". Zolang die waarde binnen een gekozen binnengrens blijft, wordt de beweging als veilig beschouwd; zodra hij die grens overschrijdt, geeft het systeem een veiligheidskritieke situatie aan.
De methode op de proef gesteld
De onderzoekers testen hun aanpak eerst in computersimulaties, waar een virtuele auto een gekromde weg volgt bij wisselende snelheden. Ze tonen aan dat de gecombineerde observer de schattingsfouten klein houdt en duidelijk momenten aangeeft waarop de auto zwaar wordt belast en de laterale volgzaamheid verslechtert. Vervolgens gaan ze naar proeven in de echte wereld met een autonome testauto op een testterrein, inclusief een gestandaardiseerde "moose test" met een plotselinge baanwisseling. Door zorgvuldig te kiezen welke sensorsignalen en hoeveel recente geschiedenis in het leermodel worden gevoed, verbeteren ze de schattingsnauwkeurigheid en tonen ze aan dat de veiligheidsindex betrouwbaar oplicht tijdens risicovolle manoeuvres en rustig blijft in andere situaties. Statistische maten bevestigen dat de verbeterde learning-aided observer de schattingsfouten meer dan halveert vergeleken met een eenvoudigere opzet.
Wat dit betekent voor alledaags rijden
Voor niet-specialisten is de kernboodschap dat deze methode zelfrijdende auto’s een genuanceerder gevoel geeft van wanneer ze dicht bij de grens komen. In plaats van alleen te vragen: "Is de auto nog stabiel?", vraagt het systeem ook: "Levert hij nog de verwachte prestaties, of begint hij af te wijken van het plan?" Door een robuust fysicamodel te vergelijken met een flexibel leermodel kan de auto gevaar eerder detecteren, zelfs wanneer de beweging op het eerste gezicht nog acceptabel lijkt. De auteurs laten zien dat deze veiligheidsbeoordeling naast bestaande controllers kan draaien en in toekomstig werk mogelijk direct kan terugkoppelen naar stuur- en remacties om geautomatiseerde voertuigen veiliger te maken in plotselinge, realistische noodsituaties.
Bronvermelding: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Trefwoorden: veiligheid autonoom rijden, laterale voertuigdynamica, reinforcement learning, toestandsschatting, hulpsystemen voor bestuurders