Clear Sky Science · it
Progetto di osservatore aiutato dall'apprendimento per migliorare la sicurezza dei veicoli autonomi
Perché una sicurezza più intelligente conta per le auto a guida autonoma
Man mano che le auto assumono più compiti di guida, devono rimanere sotto controllo anche durante sterzate improvvise, strade scivolose o problemi agli pneumatici. I sistemi odierni riescono a rilevare quando un veicolo è chiaramente fuori controllo, ma spesso fanno fatica a notare la zona grigia in cui l’auto è tecnicamente stabile ma non segue più bene la traiettoria prevista. Questo articolo presenta un nuovo modo per i veicoli autonomi di monitorare il proprio comportamento in tempo reale, individuando sia la perdita evidente di stabilità sia il degrado sottile delle prestazioni prima che diventino incidenti.
Osservare come si muove davvero un'auto
L’idea centrale è concentrarsi su come l’auto si muove lateralmente quando sterza o cambia corsia. Gli ingegneri tengono traccia di grandezze come la velocità angolare di rotazione, la rapidità dello slittamento laterale e quanto l’auto si discosta dalla traiettoria pianificata. Queste grandezze non sono tutte misurate direttamente dai sensori, quindi devono essere stimate. Gli autori costruiscono un “osservatore” — un componente software che monitora l’imput di sterzo, la velocità e la posizione e poi ricostruisce il movimento nascosto del veicolo. Se questo osservatore riesce a seguire da vicino il moto reale, può fungere da occhio interno dell’auto per la sicurezza.
Fondere fisica e apprendimento
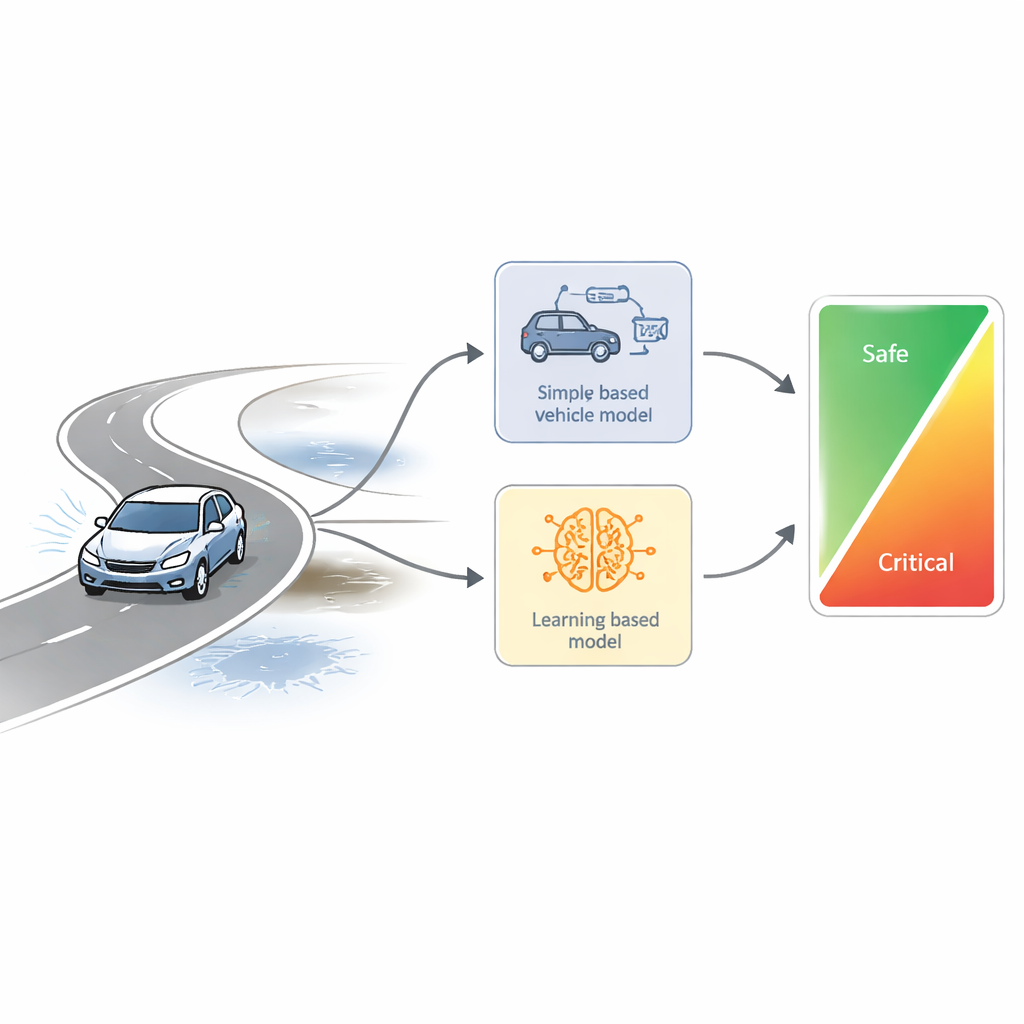
Invece di affidarsi a un unico modello, il nuovo osservatore combina due visioni molto diverse del veicolo. Una è un modello tradizionale basato sulla fisica che tratta il veicolo come una bicicletta semplificata: usa massa, inerzia e rigidità degli pneumatici per prevedere come dovrebbe comportarsi l’auto. Questo modello è robusto e ben compreso ma meno accurato quando il veicolo è spinto al limite. La seconda è un modello basato sull’apprendimento, addestrato con reinforcement learning, che apprende da molti esempi di guida come il veicolo risponde realmente, specialmente nelle curve impegnative e in altre situazioni non lineari. Eseguendo entrambi gli osservatori in parallelo, il sistema confronta ciò che predice la fisica semplificata con ciò che si aspetta il modello di apprendimento nelle condizioni reali.
Trasformare il disaccordo in un segnale di sicurezza
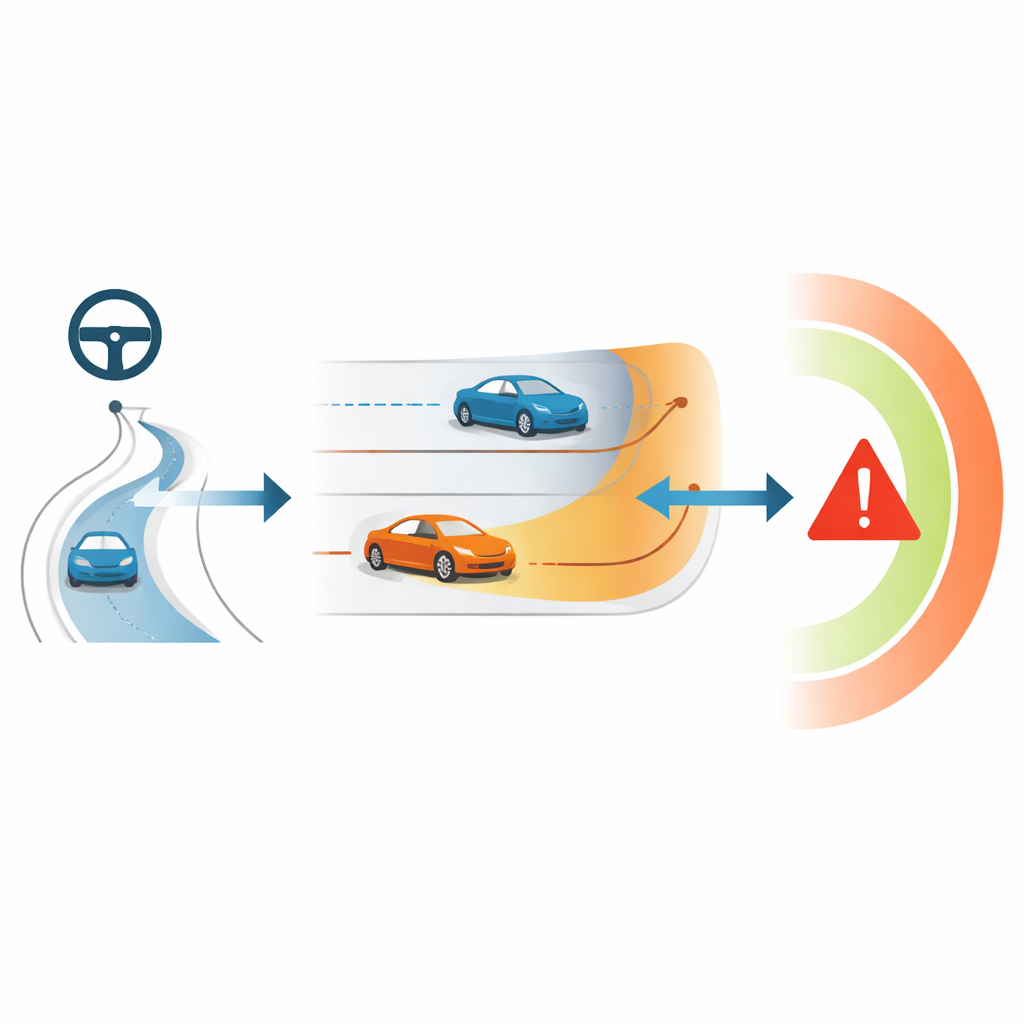
La misura di sicurezza chiave in questo lavoro è la differenza tra i due osservatori. Quando l’auto opera in un regime dolce e prevedibile, il modello di apprendimento e quello fisico concordano strettamente e questa differenza rimane piccola. Man mano che il veicolo si avvicina a condizioni più estreme — come cambi di corsia bruschi ad alta velocità, perdita improvvisa di aderenza o saturazione dello sterzo — il modello di apprendimento rileva comportamenti che il modello semplice non cattura e la differenza cresce. Gli autori raccolgono queste differenze in un unico valore, che può essere immaginato come la lunghezza di un vettore all’interno di una “bolla” di sicurezza. Finché il valore resta entro un limite interno scelto, il movimento è considerato sicuro; quando lo supera, il sistema segnala una situazione critica per la sicurezza.
Mettere alla prova il metodo
I ricercatori testano prima il loro approccio in simulazioni al computer, dove un’auto virtuale segue una strada curvilinea a velocità variabili. Dimostrano che l’osservatore combinato mantiene gli errori di stima bassi segnalando chiaramente i momenti in cui il veicolo è messo sotto forte stress e il suo tracking laterale peggiora. Successivamente passano a esperimenti in condizioni reali usando un veicolo di prova autonomo su una pista di collaudo, inclusa una prova standardizzata tipo “moose test” con un cambio di corsia improvviso. Scegliendo con cura quali segnali dei sensori e quanta storia recente fornire al modello di apprendimento, migliorano la sua accuratezza di stima e dimostrano che l’indice di sicurezza si attiva in modo affidabile durante manovre rischiose e resta calmo altrimenti. Misure statistiche confermano che l’osservatore migliorato con apprendimento riduce gli errori di stima di oltre la metà rispetto a una configurazione più semplice.
Cosa significa per la guida quotidiana
Per un lettore non specialista, la conclusione è che questo metodo fornisce alle auto a guida autonoma un senso più sfumato di quando stanno avvicinandosi al limite. Piuttosto che chiedersi solo “l’auto è ancora stabile?”, il sistema si chiede anche “sta ancora performando come previsto o sta cominciando ad allontanarsi dal piano?”. Confrontando un modello fisico solido con un modello di apprendimento flessibile, l’auto può rilevare il pericolo prima, anche quando il suo movimento sembra ancora accettabile in superficie. Gli autori mostrano che questa valutazione della sicurezza può funzionare in parallelo con i controllori esistenti oggi e potrebbe, in lavori futuri, alimentare direttamente decisioni di sterzo e frenata per mantenere i veicoli automatizzati più sicuri in emergenze reali e improvvise.
Citazione: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Parole chiave: safety nella guida autonoma, dinamica laterale del veicolo, reinforcement learning, stima dello stato, sistemi di assistenza alla guida