Clear Sky Science · es
Diseño de observador asistido por aprendizaje para mejorar la seguridad de vehículos autónomos
Por qué importa una seguridad más inteligente para los coches autónomos
A medida que los coches se encargan de más tareas de conducción, deben mantenerse bajo control incluso durante volantazos repentinos, carreteras resbaladizas o problemas con los neumáticos. Los sistemas actuales pueden detectar si un coche está claramente fuera de control, pero con frecuencia tienen dificultades para percibir la zona gris en la que el vehículo es técnicamente estable pero ya no sigue bien la trayectoria prevista. Este artículo presenta una forma nueva para que los coches autónomos supervisen su propio comportamiento en tiempo real, detectando tanto pérdidas de estabilidad evidentes como sutiles degradaciones del rendimiento antes de que se conviertan en accidentes.
Vigilando cómo se mueve realmente un coche
La idea central es centrarse en cómo se desplaza lateralmente el coche cuando gira o cambia de carril. Los ingenieros monitorizan magnitudes como la velocidad de giro del vehículo, la rapidez con la que deriva lateralmente y cuánto se desvía de la trayectoria planificada. No todas estas magnitudes se miden directamente con sensores, por lo que deben estimarse. Los autores construyen un "observador": un componente de software que vigila la entrada de la dirección, la velocidad y la posición, y reconstruye el movimiento oculto del vehículo. Si este observador puede seguir de cerca el movimiento real, puede servir como el ojo interno del coche para la seguridad.
Combinando física y aprendizaje
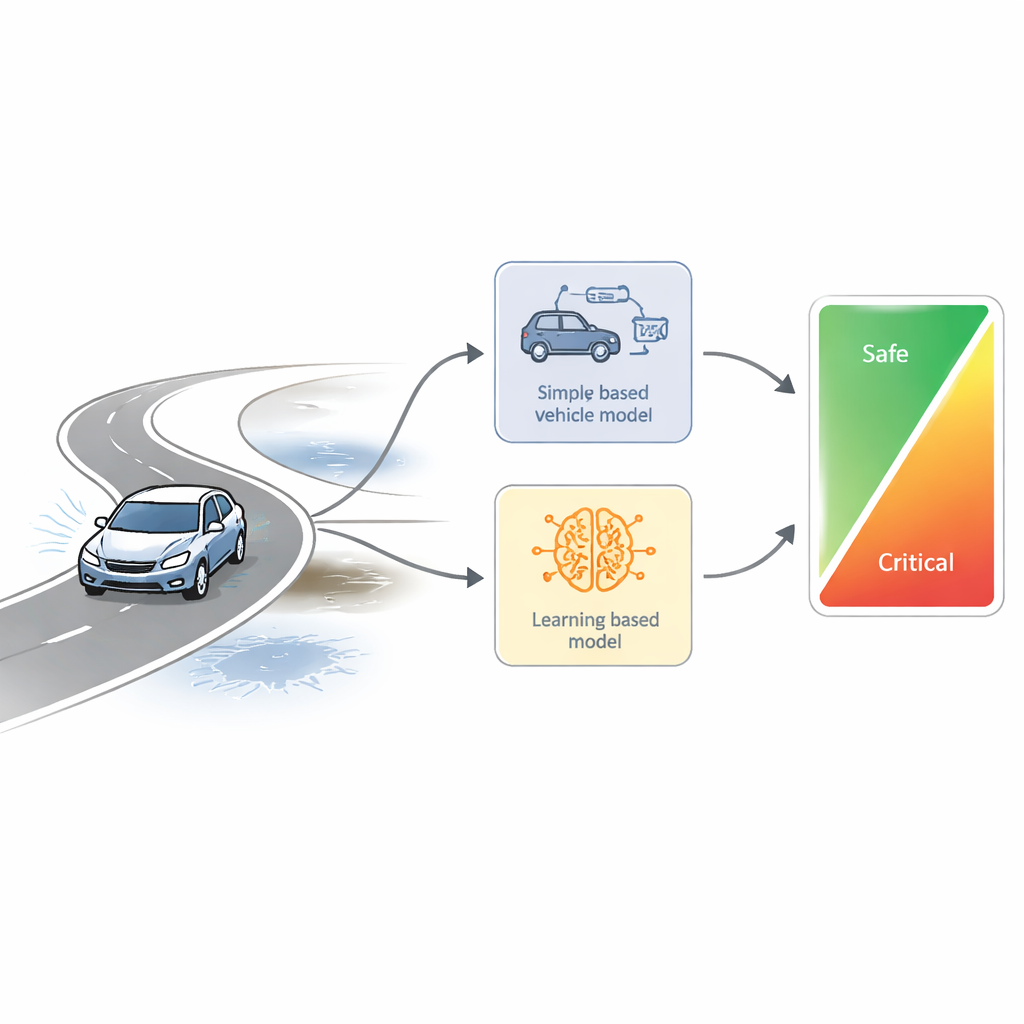
En lugar de depender de un único modelo, el nuevo observador combina dos visiones muy diferentes del coche. Una visión es un modelo físico tradicional que trata el vehículo como una bicicleta simplificada: usa masa, inercia y rigidez de los neumáticos para predecir cómo debería comportarse el coche. Este modelo es robusto y bien conocido, pero menos preciso cuando el vehículo se lleva al límite. La segunda visión es un modelo basado en aprendizaje entrenado mediante aprendizaje por refuerzo, que aprende a partir de muchos ejemplos de conducción cómo responde el coche en la práctica, especialmente en giros fuertes y otras situaciones no lineales. Al ejecutar ambos observadores en paralelo, el sistema compara lo que predice la física simple con lo que espera el modelo aprendido en condiciones reales.
Convertir el desacuerdo en una señal de seguridad
La medida clave de seguridad en este trabajo es la diferencia entre los dos observadores. Cuando el coche opera en un régimen suave y predecible, el modelo de aprendizaje y el modelo físico concuerdan estrechamente, y esta diferencia se mantiene pequeña. A medida que el vehículo se aproxima a condiciones más extremas—como cambios de carril bruscos a alta velocidad, pérdida súbita de adherencia o saturación de la dirección—el modelo aprendido detecta comportamientos que el modelo simple no puede captar, y la diferencia crece. Los autores agrupan estas diferencias en un único valor, que puede representarse como la longitud de un vector dentro de una "burbuja" de seguridad. Mientras ese valor permanezca dentro de un límite interior elegido, el movimiento se considera seguro; cuando lo supera, el sistema marca una situación crítica para la seguridad.
Poner el método a prueba
Los investigadores prueban primero su enfoque en simulaciones por ordenador donde un coche virtual sigue una carretera curva a velocidades cambiantes. Muestran que el observador combinado mantiene los errores de estimación bajos mientras señala claramente los momentos en que el coche se exige y su seguimiento lateral se degrada. A continuación, pasan a experimentos en el mundo real usando un vehículo de ensayo autónomo en un circuito de pruebas, incluyendo una prueba estandarizada tipo "moose test" con un cambio de carril repentino. Al elegir cuidadosamente qué señales de sensores y cuánta historia reciente alimentar en el modelo de aprendizaje, mejoran su precisión de estimación y demuestran que el índice de seguridad se activa de forma fiable durante movimientos riesgosos y se mantiene tranquilo en los demás casos. Medidas estadísticas confirman que el observador asistido por aprendizaje mejora los errores de estimación en más de la mitad en comparación con una configuración más simple.
Qué implica esto para la conducción diaria
Para el público general, la conclusión es que este método ofrece a los coches autónomos una sensibilidad más matizada sobre cuándo se están acercando al límite. En lugar de preguntarse solo «¿sigue siendo el coche estable?», el sistema también pregunta «¿sigue rindiendo como se espera o empieza a desviarse del plan?». Al comparar un modelo físico sólido con un modelo de aprendizaje flexible, el coche puede detectar el peligro antes, incluso cuando su movimiento aún parece aceptable en la superficie. Los autores muestran que esta evaluación de seguridad puede ejecutarse junto a los controladores existentes hoy y que, en trabajos futuros, podría retroalimentar directamente las decisiones de dirección y frenado para mantener los vehículos automatizados más seguros ante emergencias reales y repentinas.
Cita: Mihály, A., Németh, B., Kopasz, M. et al. Learning-aided observer design for improving autonomous vehicle safety. Sci Rep 16, 11858 (2026). https://doi.org/10.1038/s41598-026-35378-9
Palabras clave: seguridad de la conducción autónoma, dinámica lateral del vehículo, aprendizaje por refuerzo, estimación del estado, sistemas de asistencia al conductor