Clear Sky Science · tr
Yoğun öğrenme ile otonom araçlarda güvenlik performansı durgunluğunu aşmak
Neden daha güvenli sürücüsüz otomobiller önemli?
Sürücüsüz otomobiller daha az kaza, daha az trafik ve herkes için daha fazla hareketlilik vaat ediyor. Ancak yıllarca süren beklenti ve milyarlarca dolarlık yatırıma rağmen, her koşulda başa çıkabilen gerçek anlamda insan müdahalesi gerektirmeyen araçlar kamu yollarında hâlâ nadir. Temel engel güvenlik: bugünün sistemleri ani şerit değişimleri, saldırgan sürücüler veya kafa karıştırıcı kavşaklar gibi olağandışı, yüksek riskli durumlarla başa çıkmakta zorlanıyor. Bu makale, bu nadir ama kritik anları hedefleyen yeni bir otonom araç eğitme yöntemi sunuyor; amaç insan seviyesine yakın güvenliği zorlamak ve daha geniş bir yaygınlaşmanın önünü açmak.
Nadir tehlikelerin gizli sorunu
Çoğu zaman sürüş olaysız geçer: araçlar şeritleri takip eder, mesafeyi korur ve kötü bir şey olmaz. Öğrenme algoritmaları için bu şaşırtıcı şekilde kötü bir haber. Modern otonom araçlar derin öğrenmeye dayanıyor; bu da büyük veri miktarları üzerinden örüntüleri görerek gelişiyor. Ancak ciddi kazalar ve kazaya ramak kalma olayları bu normal sürüş okyanusunda çok nadirdir. Araçlar biraz daha güvenli hale geldikçe en tehlikeli olaylar daha da nadirleşir ve öğrenme süreci ihtiyacı olan en önemli örneklerden mahrum kalır. Yazarlar buna "nadırlık laneti" diyor. Bu, eğitimde yüksek belirselliğe yol açar ve pratikte bir tür güvenlik durgunluğuna sebep olur: bir durumu düzeltmek başka birinde kötüleştirebilir; yazarların "sarkaç etkisi" olarak tanımladığı bir ödünleşme ortaya çıkar.
Sadece kazalardan öğrenmek neden ters teper?
Birçok geliştirici bu nadırlık sorununu başarısızlıklara odaklanarak aşmaya çalışır: en kötü kazaları ve sorunlu uç durumları yeniden oynatır ve sistemlerini bu belirli hatalardan kaçınmak üzere eğitirler. Çalışma, bu sezgisel stratejinin yanıltıcı olabileceğini gösteriyor. Sadece kaza verilerine yoğunlaşmak önyargı getirir: sistem küçük bir senaryo setinde çok iyi olurken, farkında olmadan diğer aynı derecede önemli durumlarda daha kötüleşebilir. Başka bir deyişle, öğrenme süreci rotasından sapar. El yapımı kurallara dayanan emniyet katmanları, açık tehlikaları önlemek için bazı durumlarda yardımcı olur, ancak gerçek dünyanın trafik çeşitliliği ve karmaşıklığı karşısında zorlanır. Bu yaklaşımlar bir araya geldiğinde genel güvenliği sürekli olarak iyileştirmek için yeterli olmamıştır.
Her faydalı anı değerlendirmek
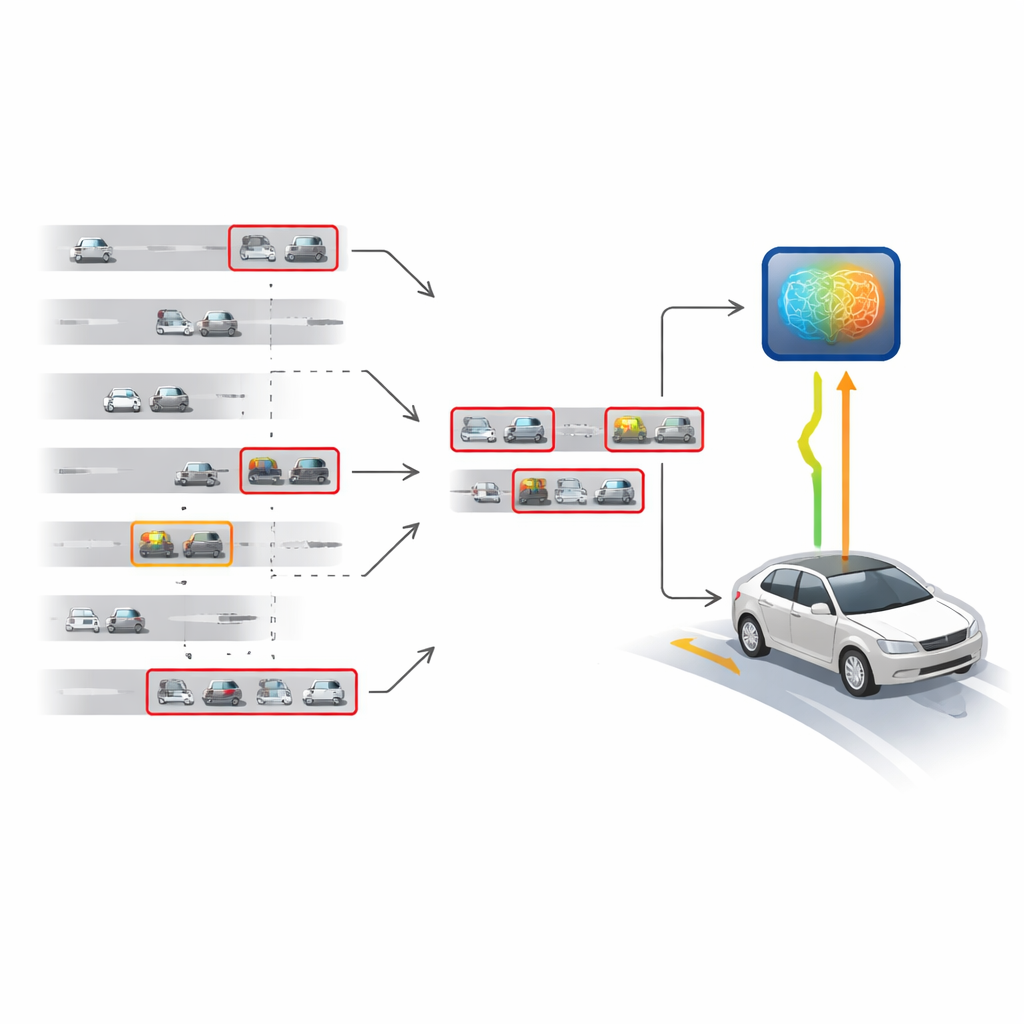
Yazarlar, eğitimi sadece daha fazla veri eklemek yerine eğitim verisini yeniden şekillendiren bir "yoğun öğrenme" stratejisi öneriyor. Tüm sürüş anlarını eşit kabul etmek yerine hem simülasyon hem de gerçek dünya bölümlerini eleyip yalnızca en bilgilendirici olanları tutuyorlar. Bunlar yalnızca daha iyi bir kararın çarpışmayı önleyebileceği önlenebilir kazaları değil, aynı zamanda neredeyse çarpışma olan ama başarıyla kaçınılan "kıl payı atlatma" olaylarını da içerir. Uzun sürüş bölümleri daha sonra yalnızca güvenlik açısından kritik zaman dilimlerini koruyacak şekilde kırpılır ve bu dilimler bilgi açısından yoğun, kompakt bir eğitim seti oluşturmak üzere yeniden birleştirilir. Öğrenilmiş bir güvenlik skoru riskli durumları otomatik olarak işaretlemeye yardımcı olur ve geriye dönük bir adım geçmiş veriyi en son sürüş politikasıyla karşıt gerçeklik simülasyonu kullanarak yeniden kontrol eder. Bölüm düzeyi, durum düzeyi ve geriye dönük olmak üzere bu üç katmanlı yoğunlaştırma, öğrenmedeki rastgeleliği büyük ölçüde azaltırken eğitim sinyalinin dürüst kalmasını sağlar.
Çeşitli araçlar için bir güvenlik yardımcı sürücüsü
Bu yoğun öğrenme hattını kullanarak ekip "SafeDriver" adını verdikleri güvenliğe odaklı bir sürüş ajanı eğitiyor. Var olan otonom sürüş sisteminin yerini almak yerine SafeDriver koruyucu bir yardımcı sürücü gibi davranıyor: normal koşullarda temel sistem kontrolü elinde tutuyor, ancak öğrenilmiş güvenlik skoru tehlikeli bir durumu algıladığında SafeDriver geçici olarak frenleme ve yönlendirmeyi devralıp aracı tehlikeden çıkarıyor. Araştırmacılar bu fikri yüksek hızlı çok şeritli otoyollar, karmaşık kavşaklar ve büyük gerçek dünya sürüş veri setlerinden oluşturulmuş kentsel ağlar gibi çeşitli koşullar altında test ediyor. Simülasyonlarda, SafeDriver eklenmesi altında bulunan sistemlere kıyasla kaza oranlarını yaklaşık bir ila iki büyüklük mertebesi azaltıyor ve "önlenebilir" kazaları daha da keskin bir şekilde düşürüyor.
Simülasyondan test pistine
Yaklaşımın bilgisayar dışında da işe yarayıp yaramadığını görmek için ekip, açık kaynak Autoware sistemiyle çalışan gerçek bir Lincoln sedanına SafeDriver takıyor ve Mcity test pistinde karma gerçeklik bir kurulumuyla değerlendiriyor. Sanal araçlar ve trafik ışıkları gerçek kamera görüntüsüne karıştırılarak insan yol kullanıcılarını tehlikeye atmadan tekrarlanabilir, yüksek riskli senaryolar sağlanıyor. Simülatörü fiziksel aracın davranışıyla dikkatle eşleştirdikten sonra, SafeDriver'ın pist testlerinde genel kaza oranını yaklaşık %90, önlenebilir kazaları ise yaklaşık %99 azalttığını gösteriyorlar. Aynı yoğunlaştırılmış eğitim ayrıca dört şehri kapsayan büyük, çeşitli bir kentsel planlama kıyaslamasında da performansı iyileştiriyor.
Günlük sürücüler için bunun anlamı nedir?
Basitçe söylemek gerekirse, bu çalışma daha güvenli sürücüsüz otomobillere giden yolun sadece daha fazla veri değil, daha akıllı veri olduğunu gösteriyor. Güvenliğin dengede olduğu nadir anlara—hem kıl payı atlatmalara hem de önlenebilir kazalara—eğitimi yoğunlaştırarak yoğun öğrenme yöntemi, başka yerlerde performanstan ödün vermeden iyileşme için daha net ve daha istikrarlı bir sinyal sağlıyor. Bu fikri tıbbi robotlar veya uçaklar gibi diğer güvenlik açısından kritik makinelerle genişletmek için daha fazla araştırma gerekse de, bu sonuçlar otonom araçların mevcut güvenlik platosundan çıkabileceğini gösteriyor. Yaygın şekilde benimsenirse, bu tür yaklaşımlar sürücüsüz teknolojiyi halkın araçların kendi kendine güvenli sürüşüne güvenmeden önce beklediği güvenilirlik seviyesine çok daha yakınlaştırabilir.
Atıf: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Anahtar kelimeler: otonom araçlar, sürücüsüz güvenlik, pekiştirmeli öğrenme, nadir olaylar, makine öğrenimi eğitim verisi