Clear Sky Science · es
Superar el estancamiento en el rendimiento de seguridad de los vehículos autónomos con aprendizaje densificado
Por qué importan los coches autónomos más seguros
Los coches autónomos prometen menos accidentes, menos congestión y mayor movilidad para todos. Aun así, tras años de expectación y miles de millones de dólares invertidos, los vehículos verdaderamente sin conductor capaces de manejar todas las condiciones siguen siendo poco comunes en las vías públicas. El principal obstáculo es la seguridad: los sistemas actuales tienen dificultades con situaciones inusuales y de alto riesgo, como un corte de carril repentino, un conductor agresivo o una intersección confusa. Este artículo presenta una nueva forma de entrenar vehículos autónomos que apunta a esos momentos raros pero cruciales, con el objetivo de elevar la seguridad cerca de los niveles humanos y desbloquear un despliegue más amplio.
El problema oculto de los peligros raros
La mayor parte del tiempo, conducir transcurre sin incidentes: los coches siguen los carriles, mantienen distancia y no ocurre nada malo. Para los algoritmos de aprendizaje, esto es sorprendentemente malo. Los vehículos autónomos modernos dependen del aprendizaje profundo, que mejora detectando patrones en enormes cantidades de datos. Pero los choques graves y los casi‑accidentes son muy raros en ese mar de conducción normal. A medida que los vehículos se vuelven algo más seguros, los eventos más peligrosos se hacen aún más escasos, privando al proceso de aprendizaje de lo que más necesita. Los autores llaman a esto la «maldición de la rareza». Conduce a una alta incertidumbre en el entrenamiento y, en la práctica, a una especie de estancamiento en la seguridad: arreglar el rendimiento en una situación puede empeorarlo en otra, un intercambio que describen como un «efecto balancín».
Por qué aprender solo de los choques sale mal
Muchos desarrolladores intentan vencer este problema de rareza centrando la atención en los fallos: reproducen los peores choques y los casos límite problemáticos, y luego entrenan sus sistemas para evitar esos errores concretos. El estudio muestra que esta estrategia intuitiva puede ser engañosa. Concentrarse únicamente en los datos de choques introduce sesgo: el sistema puede volverse muy eficaz en un pequeño conjunto de escenarios mientras, sin saberlo, empeora en otros igualmente importantes. En otras palabras, el proceso de aprendizaje se desvía. Las capas de seguridad basadas en reglas, que usan normas diseñadas a mano para prevenir peligros evidentes, ayudan en algunas situaciones pero flaquean ante la enorme variedad y complejidad del tráfico real. En conjunto, estos enfoques no han bastado para mejorar continuamente la seguridad global.
Hacer que cada momento útil cuente
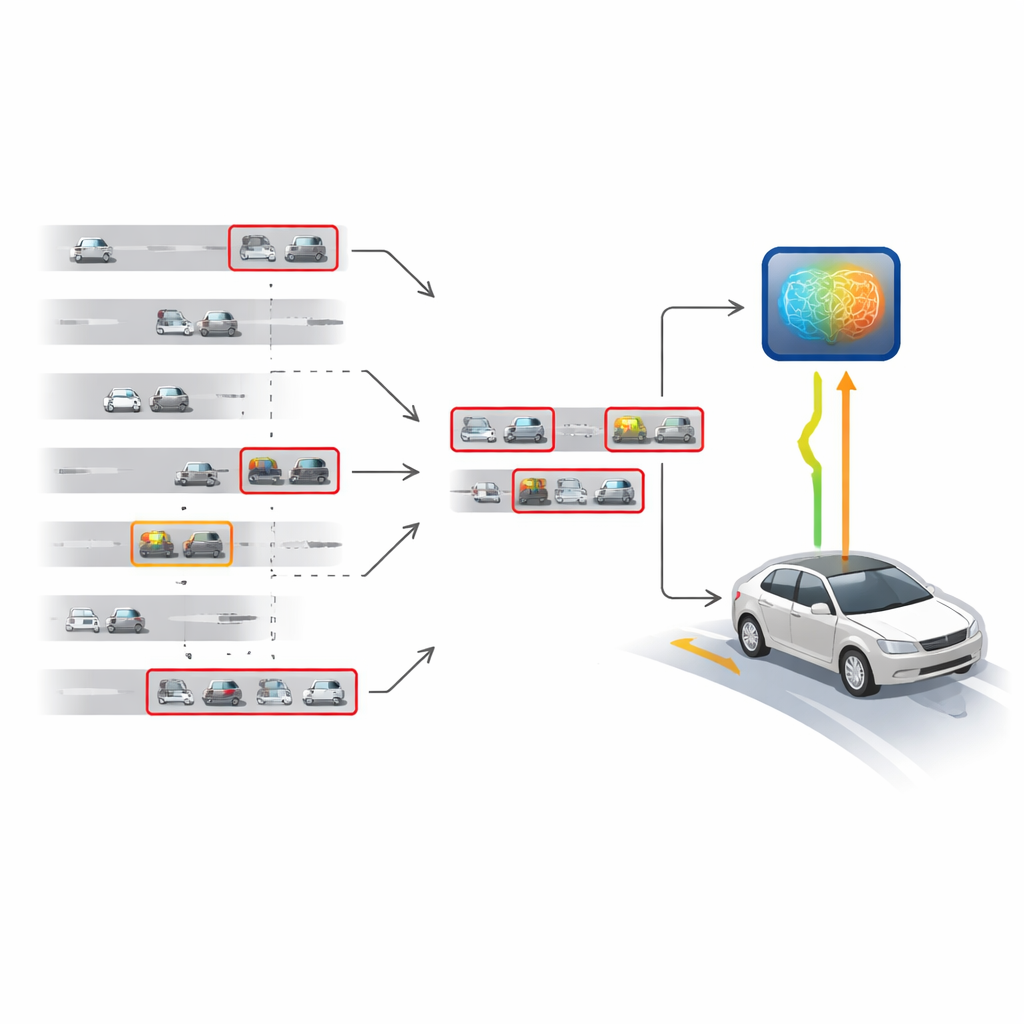
Los autores proponen una estrategia de «aprendizaje densificado» que remodela los datos de entrenamiento en lugar de limitarse a añadir más. En lugar de tratar todos los instantes de conducción por igual, filtran episodios tanto simulados como del mundo real para conservar solo los más informativos. Estos incluyen no solo choques evitables, donde una mejor decisión habría prevenido el impacto, sino también «casi‑accidentes», en los que la colisión estuvo a punto de ocurrir pero se evitó con éxito. Los episodios largos se recortan para retener únicamente los fragmentos temporales críticos para la seguridad, y esos fragmentos se reconectan para formar un conjunto de entrenamiento compacto y rico en información. Una puntuación de seguridad aprendida ayuda a detectar automáticamente estados riesgosos, y un paso retrospectivo vuelve a comprobar datos pasados frente a la política de conducción más reciente mediante simulación contrafactual. Esta densificación en tres capas —a nivel de episodio, a nivel de estado y retrospectiva— reduce enormemente la aleatoriedad en el aprendizaje manteniendo la señal de entrenamiento honesta.
Un copiloto de seguridad para muchos tipos de coches
Usando esta canalización de aprendizaje densificado, el equipo entrena un agente de conducción enfocado en la seguridad llamado «SafeDriver». En lugar de reemplazar un sistema de conducción autónoma existente, SafeDriver actúa como un copiloto protector: durante condiciones normales, el sistema base está al mando, pero cuando la puntuación de seguridad detectada por el modelo señala una situación peligrosa, SafeDriver toma brevemente el control del frenado y la dirección para sacar el coche del peligro. Los investigadores prueban esta idea en una variedad de condiciones: autopistas de varios carriles a alta velocidad, glorietas complejas y redes urbanas construidas a partir de grandes conjuntos de datos reales de conducción. En simulaciones, añadir SafeDriver reduce las tasas de choque en aproximadamente uno o dos órdenes de magnitud en comparación con los sistemas subyacentes por sí solos, y reduce los choques «evitables» aún más drásticamente.
De la simulación a la pista de pruebas
Para comprobar si el enfoque funciona fuera del ordenador, el equipo equipa un sedán Lincoln real que ejecuta el sistema de código abierto Autoware con SafeDriver y lo evalúa en la pista de pruebas Mcity usando una configuración de realidad mixta. Vehículos y semáforos virtuales se integran en la vista de la cámara real, lo que permite escenarios de alto riesgo repetibles sin poner en peligro a usuarios viales humanos. Tras afinar cuidadosamente el simulador para que coincida con el comportamiento del coche físico, muestran que SafeDriver reduce la tasa global de choques en las pruebas de pista en aproximadamente un 90 por ciento, y los choques evitables en casi un 99 por ciento. El mismo entrenamiento densificado también mejora el rendimiento en un amplio y diverso banco de pruebas de planificación urbana que abarca cuatro ciudades.
Qué supone esto para los conductores de a pie
En términos sencillos, este trabajo muestra que el camino hacia coches autónomos más seguros no es solo más datos, sino datos más inteligentes. Al concentrar el entrenamiento en los momentos raros en que la seguridad está en juego —tanto los sustos como los choques que podrían haberse evitado—, el método de aprendizaje densificado proporciona una señal de mejora más clara y estable sin sacrificar el rendimiento en otros ámbitos. Aunque se necesita más investigación para extender la idea a otras máquinas críticas para la seguridad, como robots médicos o aeronaves, estos resultados sugieren que los vehículos autónomos pueden salir de su meseta de seguridad actual. Si se adoptaran ampliamente, enfoques como este podrían acercar la tecnología de conducción autónoma al nivel de fiabilidad que el público espera antes de confiar a los coches la tarea de conducir por sí mismos.
Cita: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Palabras clave: vehículos autónomos, seguridad de la conducción autónoma, aprendizaje por refuerzo, eventos raros, datos de entrenamiento de aprendizaje automático