Clear Sky Science · nl
Doorbraak in stilstand van veiligheidsprestaties bij autonome voertuigen met dense learning
Waarom veiligere zelfrijdende auto's ertoe doen
Zelfrijdende auto's beloven minder ongevallen, minder files en meer mobiliteit voor iedereen. Toch zijn echt bestuurderloze voertuigen die onder alle omstandigheden kunnen functioneren, ondanks jaren van hype en miljarden geïnvesteerd, nog steeds zeldzaam op openbare wegen. De belangrijkste belemmering is veiligheid: de huidige systemen worstelen met ongewone, hoog‑risico situaties zoals een plotseling inscherende auto, een agressieve bestuurder of een verwarrend kruispunt. Dit artikel introduceert een nieuwe manier om autonome voertuigen te trainen die zich richt op die zeldzame maar cruciale momenten, met als doel de veiligheid naar bijna menselijk niveau te tillen en bredere inzet mogelijk te maken.
Het verborgen probleem van zeldzame gevaren
Het grootste deel van de tijd is autorijden onopvallend: auto's volgen rijstroken, houden afstand en er gebeurt niets bijzonders. Voor leeralgoritmen is dat verrassend slechte nieuws. Moderne autonome voertuigen vertrouwen op deep learning, dat verbetert door patronen te herkennen in enorme hoeveelheden data. Maar ernstige ongevallen en bijna‑ongevallen zijn zeer zeldzaam in die zee van normaal rijgedrag. Naarmate voertuigen iets veiliger worden, worden de gevaarlijkste gebeurtenissen nog zeldzamer, waardoor het leerproces tekortschiet in wat het het meest nodig heeft. De auteurs noemen dit de "vloek van zeldzaamheid." Het leidt tot grote onzekerheid tijdens training en in de praktijk tot een soort veiligheidsstagnatie: het verbeteren van prestaties in de ene situatie kan het in een andere verslechteren, een afweging die zij beschrijven als een "wip‑effect."
Waarom alleen leren van crashes tegenwerkt
Veel ontwikkelaars proberen dit zeldzaamheidsprobleem te bestrijden door zich te richten op falen: ze herhalen de ergste crashes en lastige randgevallen en trainen hun systemen om die specifieke fouten te vermijden. De studie toont aan dat deze intuïtieve strategie misleidend kan zijn. Alleen concentreren op crashdata introduceert bias: het systeem kan erg goed worden in een kleine set scenario's terwijl het onbewust slechter wordt in andere, even belangrijke situaties. Met andere woorden, het leerproces wordt uit koers gedrukt. Regelsystemen voor veiligheid, die met de handgemaakte regels voor de hand liggende gevaren proberen te voorkomen, helpen in sommige situaties maar hebben moeite met de enorme variëteit en complexiteit van het echte verkeer. Gezamenlijk zijn deze benaderingen niet voldoende geweest om de algehele veiligheid voortdurend te verbeteren.
Elke nuttige moment laten tellen
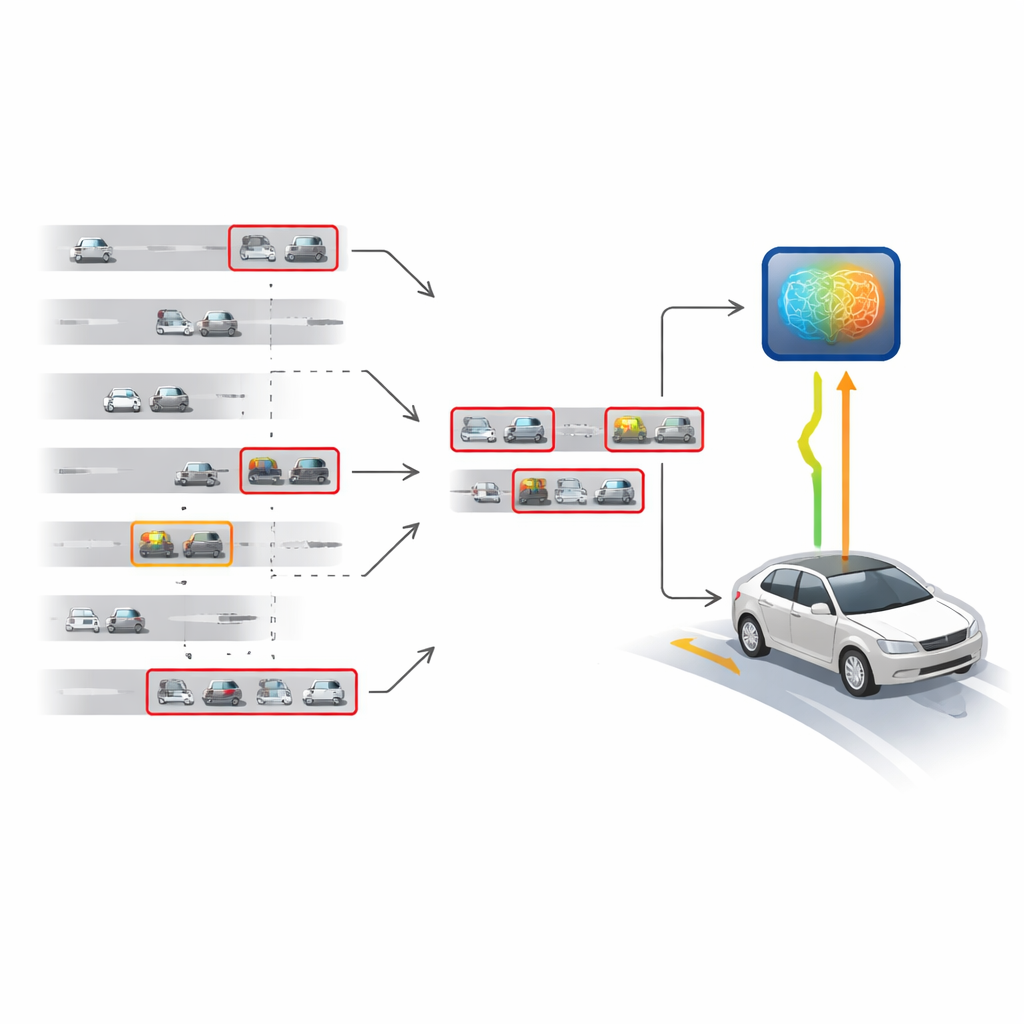
De auteurs stellen een "dense learning"‑strategie voor die de trainingsdata herschikt in plaats van simpelweg meer data toe te voegen. In plaats van alle rijmomenten gelijk te behandelen, selecteren zij uit zowel gesimuleerde als echte ritten alleen de meest informatieve episodes. Die omvatten niet alleen vermijdbare crashes, waarbij een betere beslissing een botsing had kunnen voorkomen, maar ook "bijna‑ongelukken," waarbij een botsing bijna plaatsvond maar met succes werd vermeden. Lange rijepisodes worden vervolgens ingekort om alleen de veiligheidkritische tijdssegmenten te behouden, en deze segmenten worden opnieuw gekoppeld om een compacte, informatie‑rijke trainingsset te vormen. Een aangeleerde veiligheidscore helpt risicovolle toestanden automatisch te markeren, en een retrospectieve stap controleert oude data opnieuw tegen de nieuwste rijpolicy met behulp van contrafactische simulatie. Deze drievoudige densificatie—op episode‑niveau, toestandsniveau en retrospectief—vermindert de willekeur in het leren aanzienlijk terwijl het trainingssignaal betrouwbaar blijft.
Een veiligheidscopiloot voor veel soorten auto's
Met deze dense learning‑pipeline traint het team een op veiligheid gefocuste rijagent genaamd "SafeDriver." In plaats van een bestaand autonoom rijsysteem te vervangen, fungeert SafeDriver als een beschermende copiloot: onder normale omstandigheden heeft het basissysteem de leiding, maar wanneer de aangeleerde veiligheidscore een gevaarlijke situatie detecteert, neemt SafeDriver kortstondig het remmen en sturen over om de auto uit de problemen te sturen. De onderzoekers testen dit idee in uiteenlopende omstandigheden: hogesnelheids‑meerbaanssnelwegen, complexe rotondes en stedelijke straatnetwerken opgebouwd uit grote reële rijdatasets. In simulaties verlaagt toevoeging van SafeDriver het aantal ongevallen met ongeveer één tot twee grootteordes vergeleken met de onderliggende systemen alleen, en vermindert het "vermijdbare" crashes nog sterker.
Van simulatie naar testbaan
Om te zien of de aanpak ook buiten de computer standhoudt, voorziet het team een echte Lincoln‑sedan met het open‑source Autoware‑systeem van SafeDriver en evalueert het op de Mcity‑testbaan met een mixed‑reality opstelling. Virtuele auto's en verkeerslichten worden in de echte camerabeelden ingeblend, waardoor reproduceerbare, hoogrisicoscenario's mogelijk zijn zonder echte weggebruikers in gevaar te brengen. Na zorgvuldige afstemming van de simulator op het gedrag van de fysieke auto laten ze zien dat SafeDriver het totale ongevalscijfer op de testbaan met ongeveer 90 procent vermindert, en vermijdbare ongevallen met bijna 99 procent. Dezelfde gedensificeerde training verbetert ook de prestaties op een grote, diverse stedelijke planningsbenchmark die vier steden omvat.
Wat dit betekent voor dagelijkse bestuurders
Simpel gezegd laat dit werk zien dat de weg naar veiliger zelfrijdende auto's niet alleen meer data is, maar slimmer data. Door de training te concentreren op de zeldzame momenten waarop de veiligheid op het spel staat—zowel de bijna‑ongelukken als de crashes die vermeden hadden kunnen worden—levert de dense learning‑methode een helderder, stabieler signaal voor verbetering zonder elders in te leveren op prestaties. Hoewel meer onderzoek nodig is om het idee uit te breiden naar andere veiligheidskritische machines, zoals medische robots of vliegtuigen, suggereren deze resultaten dat autonome voertuigen uit hun huidige veiligheidsplateau kunnen breken. Bij brede adoptie zouden benaderingen als deze zelfrijdende technologie veel dichter bij het betrouwbaarheidsniveau kunnen brengen dat het publiek verwacht voordat men voertuigen vertrouwt om zelfstandig te rijden.
Bronvermelding: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Trefwoorden: autonome voertuigen, zelfrijdende veiligheid, versterkend leren, zeldzame gebeurtenissen, machine learning trainingsdata