Clear Sky Science · pl
Przełamanie stagnacji bezpieczeństwa pojazdów autonomicznych dzięki dense learning
Dlaczego bezpieczniejsze samochody autonomiczne mają znaczenie
Samochody autonomiczne obiecują mniej wypadków, mniejsze korki i większą mobilność dla wszystkich. Mimo wieloletniego rozgłosu i miliardów dolarów inwestycji, prawdziwie bezzałogowe samochody zdolne radzić sobie we wszystkich warunkach nadal są rzadkością na drogach publicznych. Główną przeszkodą jest bezpieczeństwo: obecne systemy mają problemy z nietypowymi, o dużych skutkach sytuacjami, takimi jak nagłe wcinanie się innego pojazdu, agresywny kierowca czy mylące skrzyżowanie. W artykule przedstawiono nowy sposób szkolenia pojazdów autonomicznych, który koncentruje się na tych rzadkich, lecz kluczowych momentach, dążąc do zbliżenia bezpieczeństwa do poziomu ludzkiego i umożliwienia szerszego wdrożenia.
Ukryty problem rzadkich zagrożeń
Większość czasu jazda przebiega bez incydentów: samochody trzymają pasy, zachowują odstęp i nic złego się nie dzieje. Dla algorytmów uczących się to zaskakująco zła wiadomość. Nowoczesne pojazdy autonomiczne opierają się na głębokim uczeniu, które poprawia się, wykrywając wzorce w ogromnych ilościach danych. Jednak poważne wypadki i sytuacje bliskie kolizji są niezwykle rzadkie w tym oceanie normalnej jazdy. W miarę jak pojazdy stają się nieco bezpieczniejsze, najbardziej niebezpieczne zdarzenia stają się jeszcze rzadsze, pozbawiając proces uczenia tego, czego najbardziej potrzebuje. Autorzy nazywają to „klątwą rzadkości”. Prowadzi to do dużej niepewności w treningu i w praktyce do rodzaju stagnacji bezpieczeństwa: poprawa wydajności w jednej sytuacji może pogorszyć ją w innej, co opisują jako „efekt huśtawki”.
Dlaczego uczenie tylko na podstawie wypadków zawodzi
Wielu twórców próbuje pokonać problem rzadkości, koncentrując się na porażkach: odtwarzają najgorsze wypadki i problematyczne przypadki brzegowe, a następnie szkolą systemy, aby unikały tych konkretnych błędów. Badanie pokazuje, że ta intuicyjna strategia może wprowadzać w błąd. Koncentrowanie się wyłącznie na danych o wypadkach wprowadza uprzedzenie: system może stać się bardzo dobry w małym zestawie scenariuszy, jednocześnie nieświadomie pogarszając zachowanie w innych, równie ważnych sytuacjach. Innymi słowy, proces uczenia odbiega od celu. Warstwy bezpieczeństwa oparte na regułach, które używają ręcznie tworzonego zestawu zasad do zapobiegania oczywistym niebezpieczeństwom, pomagają w pewnych sytuacjach, ale mają trudności z ogromną różnorodnością i złożonością ruchu drogowego w rzeczywistym świecie. Razem te podejścia nie wystarczyły, by stale poprawiać ogólne bezpieczeństwo.
Wykorzystać każdy użyteczny moment
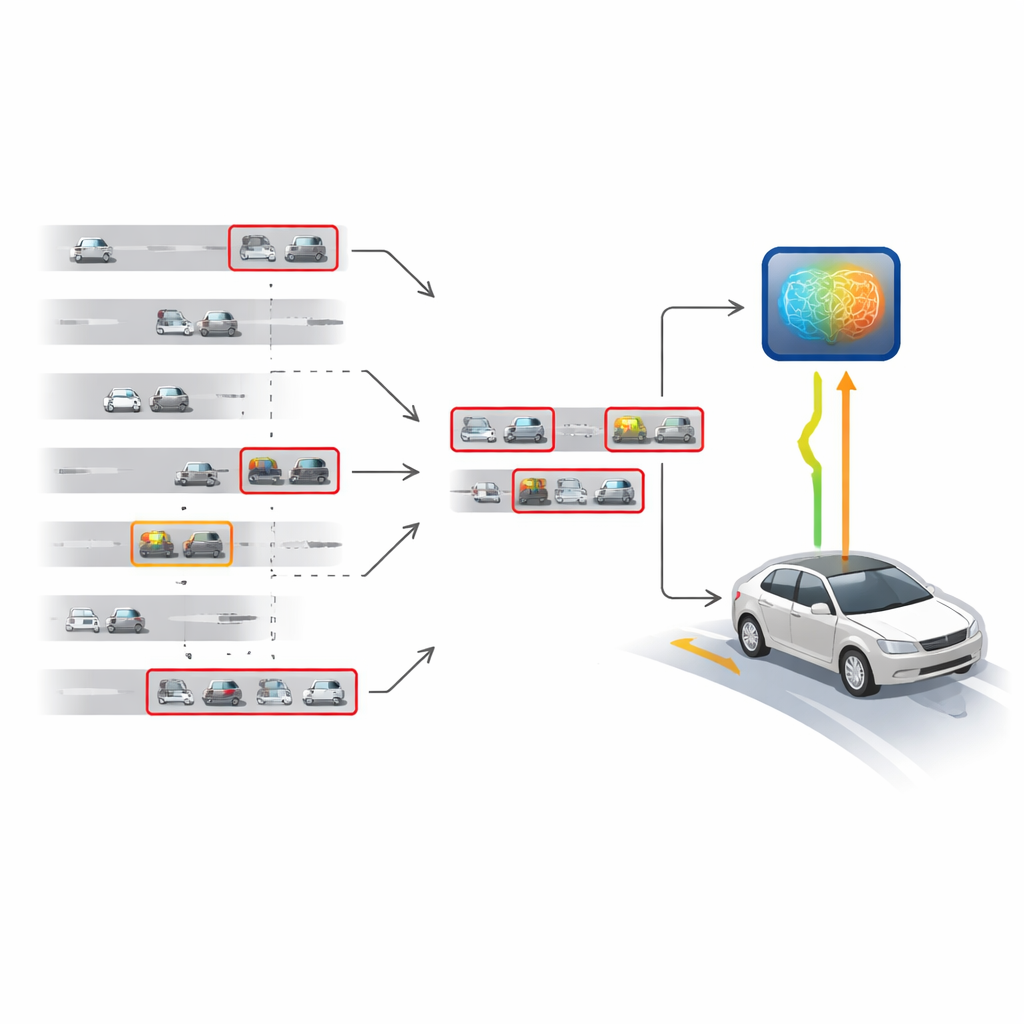
Autorzy proponują strategię „dense learning”, która przekształca dane treningowe zamiast po prostu je zwiększać. Zamiast traktować wszystkie momenty jazdy równomiernie, przesiewają zarówno epizody symulowane, jak i z rzeczywistego świata, zachowując tylko najbardziej informacyjne. Należą do nich nie tylko uniknione kolizje, gdzie lepsza decyzja zapobiegłaby zderzeniu, ale także „prawie‑kolizje”, kiedy zderzenie niemal nastąpiło, lecz udało się go uniknąć. Długie epizody jazdy są przycinane tak, by zachować jedynie krytyczne dla bezpieczeństwa fragmenty czasu, a te fragmenty są ponownie łączone, tworząc kompaktowy, bogaty w informacje zestaw treningowy. Wyuczony wskaźnik bezpieczeństwa pomaga automatycznie wyłapywać ryzykowne stany, a krok retrospektywny ponownie sprawdza przeszłe dane względem najnowszej polityki jazdy przy użyciu symulacji kontrfaktycznej. Ta trójwarstwowa gęstnienie—na poziomie epizodu, stanu i retrospektywy—znacznie zmniejsza losowość w uczeniu, jednocześnie utrzymując sygnał treningowy prawdomównym.
Współkierowca bezpieczeństwa dla wielu rodzajów samochodów
Z użyciem tego pipeline’u dense learning zespół szkoli agenta jazdy ukierunkowanego na bezpieczeństwo nazwanego „SafeDriver”. Zamiast zastępować istniejący system autonomicznej jazdy, SafeDriver działa jak ochronny współkierowca: w normalnych warunkach podstawowy system jest odpowiedzialny za sterowanie, ale gdy wyuczony wskaźnik bezpieczeństwa wykryje niebezpieczną sytuację, SafeDriver przejmuje na krótko hamowanie i sterowanie, aby wyprowadzić samochód z zagrożenia. Badacze testują tę ideę w różnych warunkach: autostrady wielopasmowe o dużych prędkościach, skomplikowane ronda i sieci ulic miejskich zbudowane na podstawie dużych zbiorów danych z rzeczywistej jazdy. W symulacjach dodanie SafeDriver zmniejsza wskaźniki wypadków o około jedno do dwóch rzędów wielkości w porównaniu z samymi systemami bazowymi, a liczba „uniknionych” wypadków spada jeszcze bardziej ostro.
Od symulacji do toru testowego
Aby sprawdzić, czy podejście sprawdza się poza komputerem, zespół wyposaża prawdziwy sedana Lincoln z otwartoźródłowym systemem Autoware w SafeDriver i ocenia go na torze testowym Mcity, używając konfiguracji mieszanej rzeczywistości. Wirtualne samochody i sygnalizacja świetlna są nakładane na rzeczywisty obraz kamery, co umożliwia powtarzalne, wysokiego ryzyka scenariusze bez narażania uczestników ruchu. Po starannym dostrojeniu symulatora tak, aby odpowiadał zachowaniu fizycznego samochodu, pokazują, że SafeDriver zmniejsza ogólną częstość wypadków w testach na torze o około 90 procent, a wypadki możliwe do uniknięcia niemal o 99 procent. To samo gęstniejące szkolenie poprawia także wyniki na dużym, zróżnicowanym benchmarku planowania miejskiego obejmującym cztery miasta.
Co to oznacza dla codziennych kierowców
W prostych słowach, ta praca pokazuje, że droga do bezpieczniejszych samochodów autonomicznych to nie tylko więcej danych, lecz mądrzejsze dane. Koncentrując trening na rzadkich momentach, od których zależy bezpieczeństwo—zarówno na bliskich sytuacjach, jak i na wypadkach, którym można było zapobiec—metoda dense learning dostarcza wyraźniejszy, stabilniejszy sygnał do poprawy bez poświęcania wydajności w innych obszarach. Choć potrzeba dalszych badań, by rozszerzyć pomysł na inne maszyny krytyczne dla bezpieczeństwa, takie jak roboty medyczne czy statki powietrzne, wyniki sugerują, że pojazdy autonomiczne mogą wydostać się z obecnego plateau bezpieczeństwa. Jeśli podejścia tego typu zostaną szeroko przyjęte, technologia autonomicznej jazdy może przybliżyć się do poziomu niezawodności, którego opinię publiczną oczekuje, zanim zaufa samochodom prowadzącym same siebie.
Cytowanie: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Słowa kluczowe: pojazdy autonomiczne, bezpieczeństwo autonomicznej jazdy, uczenie przez wzmacnianie, rzadkie zdarzenia, dane treningowe w uczeniu maszynowym