Clear Sky Science · ar
اختراق ركود أداء السلامة في المركبات الذاتية القيادة بالتعلّم الكثيف
لماذا تهم السيارات الذاتية القيادة الأكثر أمانًا
تعد السيارات الذاتية القيادة بخفض عدد الحوادث، تقليل الازدحام، وتوفير مزيد من التنقّل للجميع. ومع ذلك، بعد سنوات من الضجيج واستثمارات بمليارات الدولارات، تظل السيارات الخالية تمامًا من السائق والقادرة على التعامل مع كل الظروف نادرة على الطرق العامة. العائق الرئيسي هو السلامة: الأنظمة الحالية تكافح مع المواقف النادرة ذات المخاطر العالية مثل القَطع المفاجئ للمسار، سائق عدواني، أو تقاطع مربك. هذا البحث يقدم طريقة جديدة لتدريب المركبات الذاتية تستهدف تلك اللحظات النادرة ولكن الحاسمة، بهدف دفع السلامة إلى مستويات تقارب قدرات البشر وتمكين نشر أوسع.
المشكلة الخفية للأخطار النادرة
معظم أوقات القيادة لا تحدث بها أحداث ملحوظة: السيارات تتبع الحارات، تحافظ على المسافة، ولا يقع شيء سيئ. بالنسبة لخوارزميات التعلم، هذا خبر سيئ على نحو مفاجئ. تعتمد المركبات الذاتية الحديثة على التعلم العميق، الذي يتحسن برصد الأنماط عبر كميات هائلة من البيانات. لكن الحوادث الخطيرة والاقتربات من الاصطدام نادرة جدًا في بحر القيادة الطبيعية هذا. ومع تحسّن أمان المركبات قليلاً، تصبح الأحداث الأخطر أكثر ندرة، مما يجوع عملية التعلم عما تحتاجه أكثر. يسمي المؤلفون هذا "لعنة الندرة". تؤدي إلى عدم يقين عالٍ أثناء التدريب، وعمليًا إلى نوع من ركود السلامة: إصلاح الأداء في موقف واحد قد يجعل الأداء أسوأ في موقف آخر، وهو مقايضة يصفونها بـ"تأثير الأرجوحة".
لماذا يفشل التعلم من الحوادث فقط
يحاول كثير من المطورين التغلب على مشكلة الندرة من خلال التركيز على الفشل: يعيدون تشغيل أسوأ الحوادث والحالات الحدية المزعجة، ثم يدربون أنظمتهم لتجنّب تلك الأخطاء المحددة. تُظهر الدراسة أن هذه الاستراتيجية البديهية قد تكون مضللة. التركيز فقط على بيانات الحوادث يُدخل تحيّزًا: قد يصبح النظام جيدًا جدًا في مجموعة صغيرة من السيناريوهات بينما يزداد سُوءه في سيناريوهات أخرى لا تقل أهمية. بعبارة أخرى، يتم دفع عملية التعلم عن مسارها. طبقات السلامة المعتمدة على قواعد مكتوبة يدويًا تساعد في بعض الحالات لكنها تعاني من التنوع الهائل وتعقيد حركة المرور في العالم الحقيقي. معًا، لم تكن هذه الأساليب كافية لتحسين السلامة العامة باستمرار.
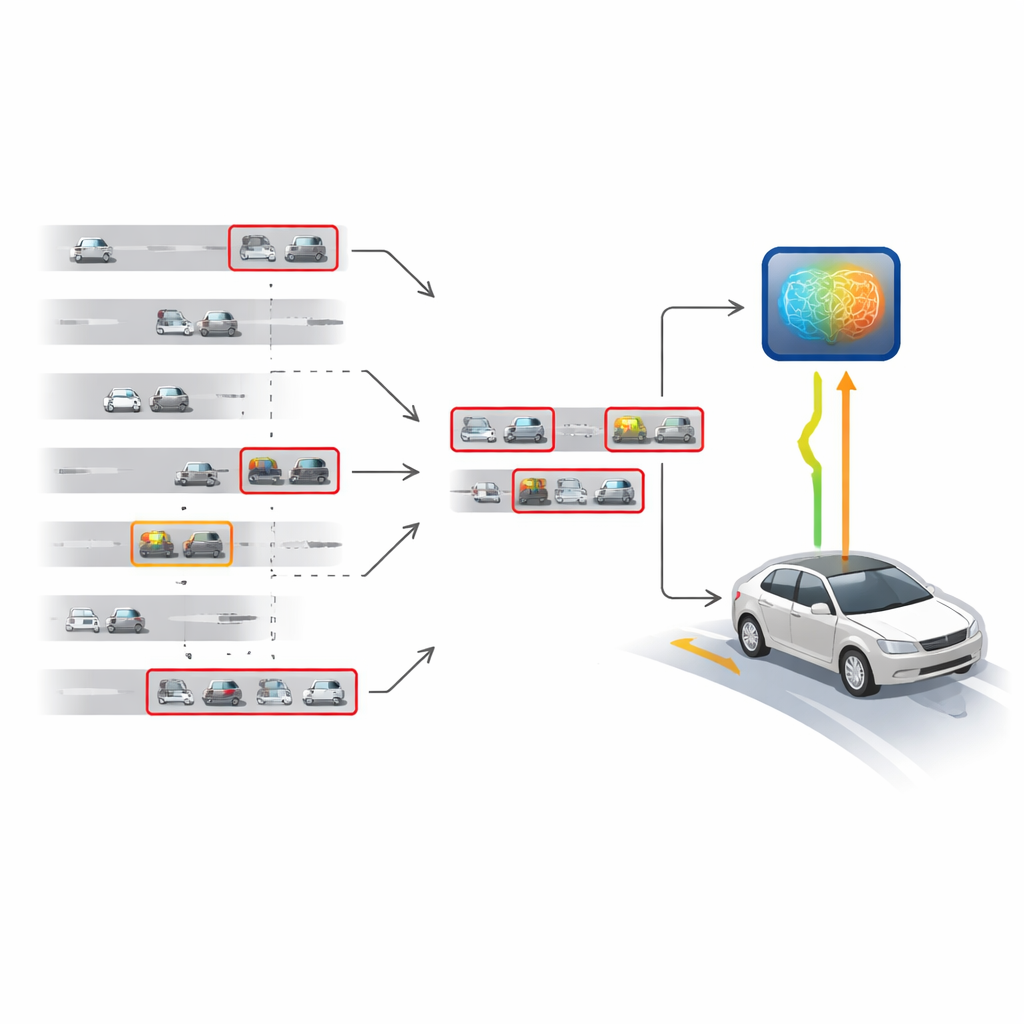
جعل كل لحظة مفيدة مهمة
يقترح المؤلفون استراتيجية "التعلّم الكثيف" التي تعيد تشكيل بيانات التدريب بدلًا من مجرد إضافة المزيد منها. بدلاً من معاملة كل لحظات القيادة على قدم المساواة، يفرزون الحلقات التجريبية المحاكاة والحقيقية للاحتفاظ فقط بالتي تحمل أكبر قدر من المعلومات. تشمل هذه ليس فقط الحوادث القابلة للتجنّب، حيث كانت هناك قرار أفضل كان سيمنع التصادم، بل أيضًا "الاقترابات الخطرة" التي كادت أن تؤدي إلى تصادم ولكن تم تجنّبها بنجاح. تُقص الحلقات الطويلة بحيث تُحتفظ فقط بالشرائح الزمنية الحرجة للسلامة، ثم تُعاد وصل هذه الشرائح لتكوين مجموعة تدريب مُركزة وغنية بالمعلومات. يساعد مقياس سلامة متعلّم على تمييز الحالات الخطرة تلقائيًا، وتُعاد خطوة استرجاعية لتدقيق البيانات السابقة مقابل سياسة القيادة الحالية باستخدام محاكاة مضادة للواقع. هذا التكثيف المكوّن من ثلاث طبقات — على مستوى الحلقة، مستوى الحالة، والاسترجاعي — يقلل كثيرًا من العشوائية في التعلم مع الحفاظ على إشارة تدريب أمينة.
مساعد أمان لعدة أنواع من السيارات
باستخدام خط أنابيب التعلّم الكثيف هذا، يدرب الفريق وكيل قيادة مركزًا على السلامة أطلقوا عليه اسم "سيف درايفر" (السائق الآمن). بدلًا من استبدال نظام القيادة الآلي القائم، يعمل سيف درايفر كمساعد واقٍ: في الظروف الطبيعية يكون النظام الأساسي هو المتحكّم، لكن عندما يكتشف مقياس السلامة المتعلّم حالة خطرة، يتولى سيف درايفر لفترة وجيزة عملية الكبح وتوجيه المركبة لإخراجها من الخطر. يختبر الباحثون هذه الفكرة عبر مجموعة من الظروف: طرق سريعة متعددة الحارات عالية السرعة، دوارات معقدة، وشبكات شوارع حضرية مبنية من مجموعات بيانات قيادة عالمية كبيرة. في المحاكاة، يُخفض إضافة سيف درايفر معدلات الحوادث بما يقارب إلى ترتيبين مقدمًا مقارنة بالأنظمة الأساسية وحدها، ويقلل الحوادث القابلة للتجنّب بشكل أشدّ.
من المحاكاة إلى مضمار الاختبار
للاختبار خارج الحاسوب، يزوّد الفريق سيارة لينكولن سيدان حقيقية تعمل بنظام Autoware مفتوح المصدر بـسيف درايفر ويقيّمها على مضمار Mcity باستخدام إعداد واقع مختلط. تُدمج السيارات الافتراضية وإشارات المرور الافتراضية في العرض الكاميري الحقيقي، مما يسمح بسيناريوهات عالية الخطورة قابلة للتكرار دون تعريض مستخدمي الطرق البشريين للخطر. بعد ضبط المحاكاة بعناية لتطابق سلوك السيارة الفيزيائية، يظهرون أن سيف درايفر يقلل معدل الحوادث الكلي في اختبارات المضمار بنحو 90 بالمئة تقريبًا، والحوادث القابلة للتجنّب بنحو 99 بالمئة تقريبًا. كما يحسّن نفس التدريب المكثف الأداء على معيار تخطيط حضري كبير ومتنوّع يغطي أربع مدن.
ماذا يعني هذا للسائقين اليوميين
بعبارات بسيطة، يُظهر هذا العمل أن الطريق إلى سيارات ذاتية القيادة أكثر أمانًا لا يقوم فقط على المزيد من البيانات، بل على بيانات أذكى. من خلال تركيز التدريب على اللحظات النادرة التي تتوقّف عندها السلامة — سواء الاقترابات الخطرة أو الحوادث التي كان يمكن تجنّبها — يوفر أسلوب التعلّم الكثيف إشارة أوضح وأكثر ثباتًا للتحسين دون التضحية بالأداء في أماكن أخرى. ومع أن البحث الإضافي مطلوب لتوسيع الفكرة إلى آلات أخرى حرجة للسلامة، مثل الروبوتات الطبية أو الطائرات، تشير هذه النتائج إلى أن المركبات الذاتية قد تكسر بلاتوه السلامة الحالي. إذا تم اعتماد أساليب من هذا النوع على نطاق واسع، فقد تقرّب تقنية القيادة الذاتية كثيرًا من مستوى الموثوقية الذي يتوقعه الجمهور قبل أن يثق في السيارات لتقود نفسها.
الاستشهاد: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
الكلمات المفتاحية: المركبات الذاتية القيادة, سلامة القيادة الذاتية, تعلّم التعزيز, الأحداث النادرة, بيانات تدريب التعلم الآلي