Clear Sky Science · ru
Преодоление застоя в безопасности автономных транспортных средств с помощью плотного обучения
Почему безопасные автопилоты важны
Автомобили с автопилотом обещают меньше аварий, меньше заторов и большую мобильность для всех. Однако после лет шумихи и миллиардов долларов инвестиций по‑настоящему беспилотные машины, способные справляться со всеми условиями, по‑прежнему редкость на дорогах общего пользования. Главный тормоз — безопасность: современные системы испытывают трудности с необычными, критичными ситуациями, такими как внезапный перестроение, агрессивный водитель или запутанный перекрёсток. В этой работе предлагается новый способ обучения автономных автомобилей, нацеленный на эти редкие, но ключевые моменты, с задачей приблизить безопасность к уровню человека и открыть путь к более широкому внедрению.
Скрытая проблема редких угроз
Большую часть времени вождения ничего особенного не происходит: автомобили держатся в полосе, соблюдают дистанцию и аварий не случается. Для алгоритмов обучения это, как ни парадоксально, плохая новость. Современные автономные системы опираются на глубокое обучение, которое улучшается, находя закономерности в огромных объёмах данных. Но серьёзные аварии и близкие к ним инциденты крайне редки в этом море обычного вождения. По мере того как машины становятся немного безопаснее, самые опасные события становятся ещё более редкими, лишая процесс обучения того, что ему наиболее нужно. Авторы называют это «проклятием редкости». Оно ведёт к высокой неопределённости в обучении и, в практическом смысле, к некоему застою в безопасности: улучшение в одной ситуации может ухудшить результат в другой — компромиссу, который они описывают как эффект «качелей».
Почему обучение только на авариях даёт обратный эффект
Многие разработчики пытаются победить эту проблему редкости, сосредоточившись на сбоях: они воспроизводят худшие аварии и проблемные пограничные случаи, а затем обучают системы избегать именно этих ошибок. Исследование показывает, что эта интуитивная стратегия может вводить в заблуждение. Концентрация только на данных об авариях вносит смещение: система может стать очень хорошей в узком наборе сценариев, одновременно непреднамеренно ухудшив работу в других, не менее важных ситуациях. Иными словами, процесс обучения смещается с правильного курса. Правила на основе эвристик, использующие вручную разработанные предписания для предотвращения очевидных опасностей, помогают в некоторых ситуациях, но испытывают трудности с огромным разнообразием и сложностью реального дорожного движения. В совокупности эти подходы оказались недостаточными для непрерывного повышения общей безопасности.
Делать каждый полезный момент значимым
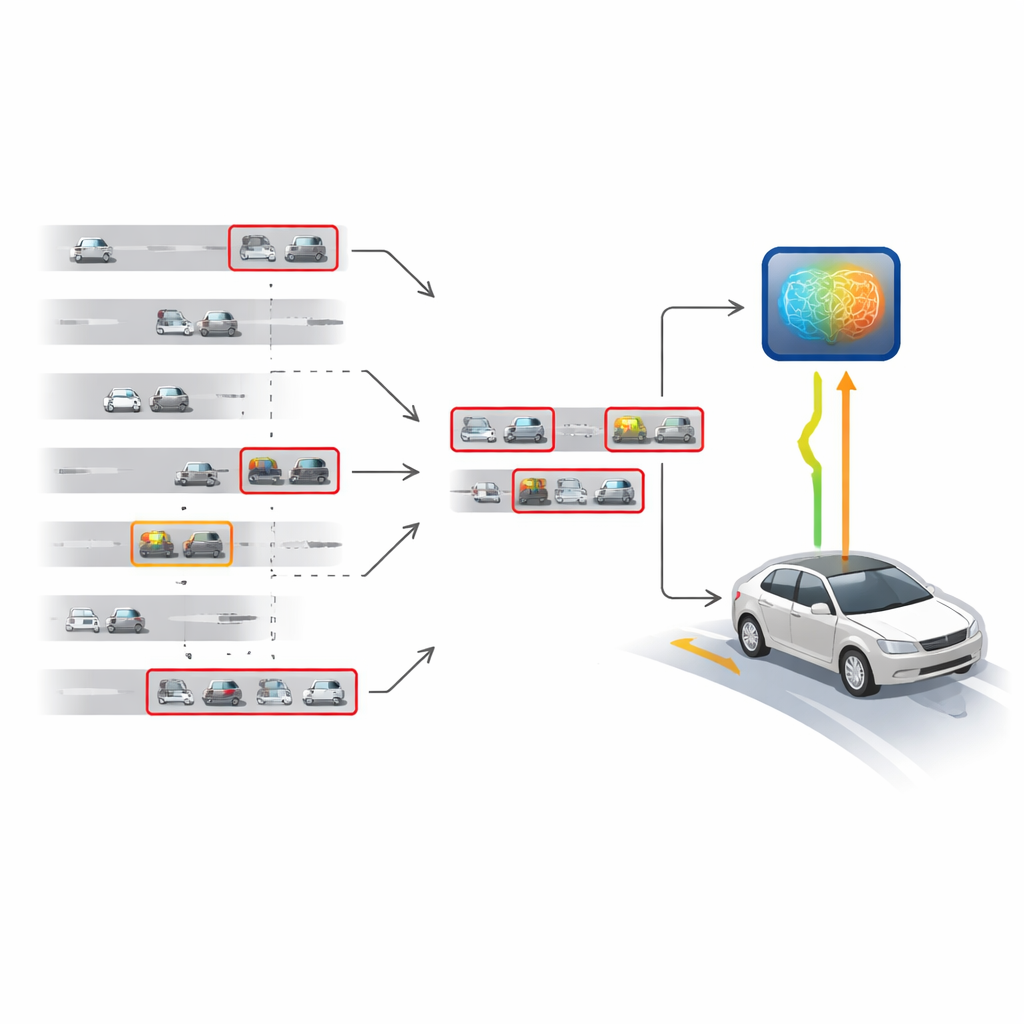
Авторы предлагают стратегию «плотного обучения», которая меняет структуру тренировочных данных, а не просто увеличивает их объём. Вместо того чтобы считать все моменты вождения одинаково важными, они просеивают как симулированные, так и реальные эпизоды, оставляя только наиболее информативные. Сюда входят не только предотвращённые столкновения, где более удачное решение могло бы предотвратить удар, но и «почти‑столкновения», когда авария едва не произошла, но была успешно предотвращена. Длинные эпизоды вождения затем сокращают, чтобы сохранить только критические для безопасности фрагменты времени, а эти фрагменты объединяют в компактный, насыщенный информацией набор для обучения. Обученный показатель безопасности помогает автоматически отмечать рискованные состояния, а ретроспективный шаг пере‑проверяет прошлые данные в свете последней политики вождения с использованием контрфактического моделирования. Эта трёхслойная денсфикация — на уровне эпизодов, состояний и ретроспективы — существенно снижает случайность в обучении при сохранении честного сигнала для тренировки.
Сопровождающий модуль безопасности для разных автомобилей
С помощью этого конвейера плотного обучения команда обучает ориентированного на безопасность агента под названием «SafeDriver». Вместо того чтобы заменять существующую систему автономного вождения, SafeDriver выступает как защитный соведущий: в обычных условиях за управление отвечает базовая система, но когда обученный показатель безопасности обнаруживает опасную ситуацию, SafeDriver на короткое время берет на себя торможение и руление, чтобы вывести автомобиль из опасности. Исследователи тестируют эту идею в различных условиях: на многополосных скоростных шоссе, сложных кольцевых развязках и в городских уличных сетях, построенных на основе больших реальных датасетов вождения. В симуляциях добавление SafeDriver снижает частоту аварий примерно на один–два порядка величины по сравнению с самими по себе базовыми системами и ещё сильнее сокращает число «избежных» аварий.
От симуляции к испытательному треку
Чтобы проверить, работает ли подход вне компьютера, команда оснастила реальный седан Lincoln с открытой системой Autoware модулем SafeDriver и оценивала его на испытательном треке Mcity с использованием установки смешанной реальности. Виртуальные автомобили и светофоры совмещались с реальным видеопотоком камеры, что позволяло воспроизводить высокорискованные сценарии без угрозы для людей на дороге. После тщательной настройки симулятора для соответствия поведению физического автомобиля они показали, что SafeDriver сокращает общую частоту аварий на треке примерно на 90 процентов, а число предотвращённых аварий — почти на 99 процентов. Та же денсифицированная подготовка также улучшает результаты на большом и разнородном бенчмарке по городскому планированию, охватывающему четыре города.
Что это значит для обычных водителей
Проще говоря, работа показывает, что путь к более безопасным автопилотам — не просто больше данных, а умнее данные. Сосредоточив обучение на редких моментах, когда на кону стоит безопасность — как на близких вызовах, так и на предотвращённых авариях — метод плотного обучения даёт более чёткий и стабильный сигнал для улучшений, не жертвуя производительностью в других ситуациях. Хотя требуется дальнейшее исследование, чтобы распространить идею на другие критически важные системы, такие как медицинские роботы или самолёты, эти результаты дают основания полагать, что автономные транспортные средства могут вырваться из нынешнего плато безопасности. При широком принятии подобные подходы могут приблизить технологии автономного вождения к уровню надёжности, которого ожидает общественность, прежде чем доверить автомобилю самостоятельное управление.
Цитирование: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Ключевые слова: автономные транспортные средства, безопасность беспилотников, обучение с подкреплением, редкие события, данные для обучения машин