Clear Sky Science · he
לשבור את קיפאון הביצועים הבטיחותיים ברכבים אוטונומיים באמצעות למידה צפופה
מדוע רכבים נהגים עצמיים בטוחים יותר חשובים
רכבים נהגים עצמיים מבטיחים פחות תאונות, פחות עומסי תנועה ויותר ניידות לכולם. ואולם אחרי שנים של הייפ ומיליארדי דולרים שהושקעו, רכבים שבאמת פועלים ללא נהג ויכולים להתמודד עם כל התנאים עדיין נדירים בדרכים הציבוריות. המחסום העיקרי הוא בטיחות: מערכות היום מתקשות במצבים חריגים ובעלי סיכון גבוה כמו חיתוך פתאומי, נהג אגרסיבי או צומת מבלבל. מאמר זה מציג דרך חדשה לאמן רכבים אוטונומיים שממוקדת ברגעים נדירים אך מכריעים אלה, במטרה לדחוף את הבטיחות קרוב לרמה האנושית ולאפשר פריסה רחבה יותר.
הבעיה הנסתרת של סכנות נדירות
ברוב הזמן הנהיגה שגרתית: רכבים שומרים על נתיבים, שומרים מרחק, ושום דבר רע לא קורה. עבור אלגוריתמים של למידה זו חדשות רעות מפתיעות. רכבים אוטונומיים מודרניים נשענים על למידה עמוקה, שמשתפרת על ידי זיהוי דפוסים מתוך כמויות עצומות של נתונים. אך תאונות קשות ותקריות כמעט‑תאונה נדירות מאוד בים הנהיגה הרגילה הזה. ככל שהרכבים נעשים מעט בטוחים יותר, האירועים המסוכנים ביותר נעשים נדירים עוד יותר, מה שגורע מהתהליך הלימודי את מה שהוא צריך ביותר. המחברים מכנים זאת "קללת הנדירות." היא מובילה לאי־וודאות גבוהה באימון ובפועל לקיפאון בטיחותי: תיקון ביצועים בסיטואציה אחת עלול להחמיר אחרים, סחר־מכר שהם מתארים כ"אפקט ססול".
מדוע למידה רק מתאונות מתנקמת
מפתחים רבים מנסים להתגבר על בעיית הנדירות על ידי התמקדות בכישלונות: הם משחזרים את התאונות הגרועות והמקרים הקיצוניים הבעייתיים ואז מאמנים את המערכות להימנע מאותן שגיאות ספציפיות. המחקר מראה שאסטרטגיה אינטואיטיבית זו עלולה להטעות. התמקדות רק בנתוני תאונות מייצרת הטיה: המערכת עלולה להפוך מצוינת בקבוצה קטנה של תרחישים בזמן שבחוסר מודעות היא מחמירה באחרים, חשובים לא פחות. במילים אחרות, תהליך הלמידה מוצא את דרכו מהמסלול. שכבות בטיחות מבוססות־כללים, שמשתמשות בכללים בעבודת יד כדי למנוע סכנות ברורות, עוזרות בחלק מהמקרים אך נאבקות עם המגוון העצום ומורכבות התנועה בעולם האמיתי. יחד, גישות אלו לא היו מספקות לשיפור רציף של הבטיחות הכוללת.
להפוך כל רגע מועיל לחשוב
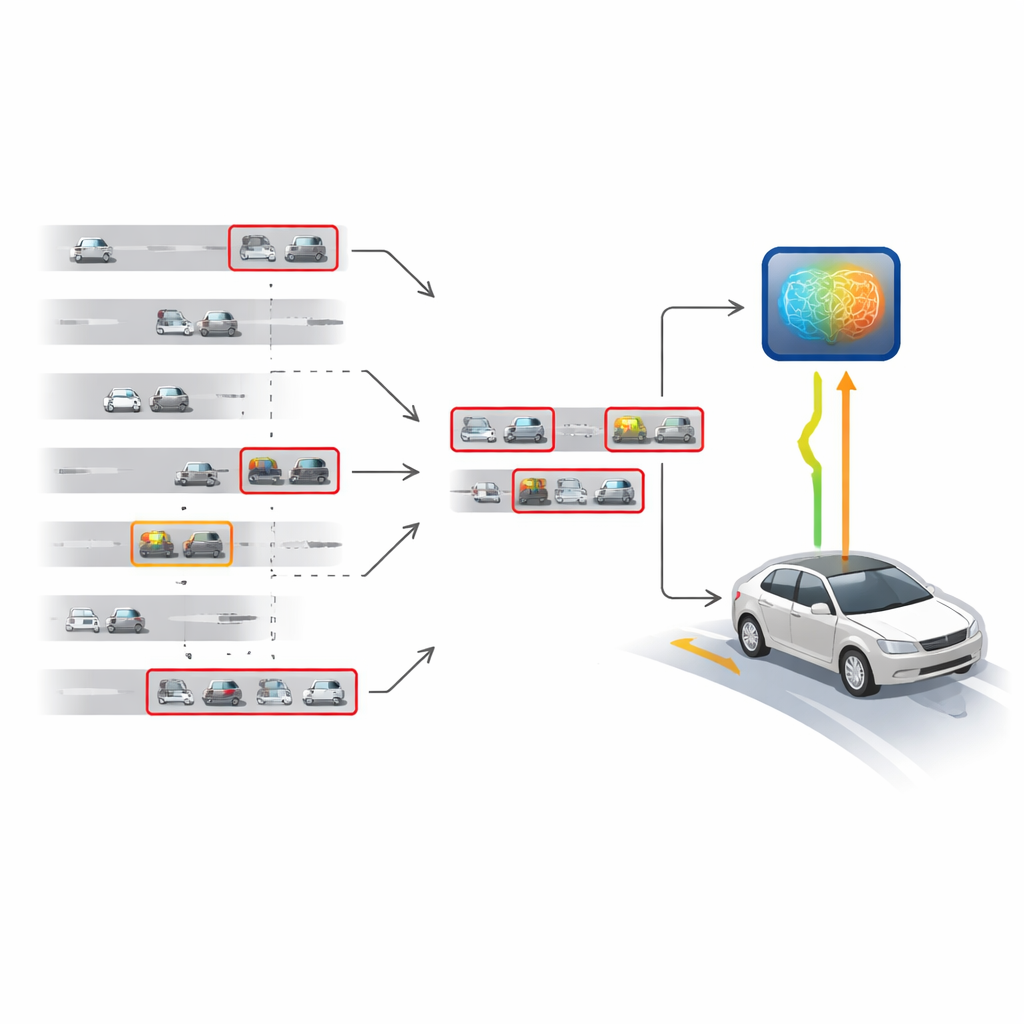
המחברים מציעים אסטרטגיית "למידה צפופה" המחוללת מחדש את נתוני האימון במקום פשוט להוסיף עוד מהם. במקום להתייחס לכל רגעי הנהיגה כשווים, הם מסננים פרקים הן מהדמיות והן מעולם אמיתי כדי לשמר רק את הפרקים המידעיים ביותר. אלה כוללים לא רק תאונות שניתן היה להימנע מהן — שבהן החלטה טובה יותר הייתה מונעת מפגש — אלא גם "חבלי־מזל" שבהם התנגשות כמעט התרחשה אך נמנעה בהצלחה. פרקי נהיגה ארוכים מתקצרים כדי לשמר רק את רצועות הזמן הקריטיות לבטיחות, והרצועות האלה מתחברות מחדש ליצירת סט אימון קומפקטי ועשיר במידע. ציון בטיחות הנלמד מסייע לסמן באופן אוטומטי מצבים מסוכנים, וצעדים רטרוספקטיביים בודקים מחדש נתונים קודמים מול מדיניות הנהיגה העדכנית באמצעות סימולציה קונטרה־פקטואלית. שלוש שכבות הדחיסה — ברמת הפרק, ברמת המצב ובדיקת רטרוספקטיבה — מצמצמות משמעותית את הרנדומליות בלמידה תוך שמירה על אות אימון אמין.
נהג־שותף בטיחותי לסוגי רכבים רבים
באמצעות צינור למידה צפוף זה, הצוות מאמן סוכן נהיגה ממוקד־בטיחות בשם "SafeDriver." במקום להחליף מערכת נהיגה אוטונומית קיימת, SafeDriver פועל כנהג־שותף מגן: במצבים שגרתיים המערכת הבסיסית מנהלת את הנהיגה, אך כאשר ציון הבטיחות הנלמד מזהה מצב מסוכן, SafeDriver משתלט לזמן קצר על הבלימה וההיגוי כדי להוציא את הרכב מהסכנה. החוקרים בוחנים רעיון זה בתנאים מגוונים: כבישים מהירים מרובי נתיבים במהירות גבוהה, כיכרות מורכבות ורשתות רחוב עירוניות שנבנו מתוך מאגרי נהיגה גדולים מהעולם האמיתי. בסימולציות, הוספת SafeDriver מקטינה שיעורי תאונות בכמעט סדר עד שני לסחר במערכת הבסיסית בלבד, ומצמצמת תאונות "ניתנות למניעה" אף יותר.
מהסימולציה למסלול הניסויים
כדי לבדוק אם הגישה מסתדרת מחוץ למחשב, הצוות צייד סדאן לינקולן אמיתי שמריץ את המערכת בקוד פתוח Autoware ב־SafeDriver והעריך אותו במסלול הניסויים Mcity באמצעות התקנה של מציאות מעורבת. מכוניות וירטואליות ורמזורים משתלבים בתצוגת המצלמה הריאלית, מה שמאפשר תרחישים מסוכנים שחוזרים על עצמם ללא סיכון למשתמשי הדרך האנושיים. לאחר כיול זהיר של הדימולטור כדי להתאים להתנהגות הרכב הפיזי, הם מראים ש־SafeDriver מצמצם את שיעור התאונות הכולל בניסויי מסלול בכ־90 אחוז, ואת התאונות הניתנות למניעה בכמעט 99 אחוז. האימון המוצפן הזה גם משפר ביצועים במדד תכנון עירוני גדול ומגוון שמכסה ארבע ערים.
מה המשמעות הזו לנהגים היומיומיים
במילים פשוטות, עבודה זו מראה שהדרך לרכבים נהגים עצמיים בטוחים יותר אינה רק עוד נתונים, אלא נתונים חכמים יותר. על ידי ריכוז האימון ברגעים הנדירים שבהם הבטיחות תלויה בהחלטה — גם הקרבות וגם התאונות שיכלו להימנע — שיטה של למידה צפופה מספקת אות ברור ויציב לשיפור מבלי להקריב ביצועים באחרים. בעוד שצריך עוד מחקר כדי להרחיב את הרעיון למכונות קריטיות־בטיחות אחרות, כמו רובוטים רפואיים או כלי טיס, התוצאות הללו מרמזות כי רכבים אוטונומיים יכולים לשבור את רמת הבטיחות העכשווית שלהם. אם יאומצו בצורה נרחבת, גישות כאלה עשויות לקרב את טכנולוגיית הנהיגה העצמית לרמת האמינות שהציבור מצפה לה לפני שיסמוך על רכבים לנהוג בעצמם.
ציטוט: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
מילות מפתח: רכבים אוטונומיים, בטיחות נהיגה עצמית, למידת חיזוק, אירועים נדירים, נתוני אימון בלמידת מכונה