Clear Sky Science · ja
密な学習で自動運転車の安全性能停滞を打破する
なぜより安全な自動運転車が重要か
自動運転車は事故の減少、渋滞の緩和、そしてより多くの人に移動の自由をもたらすことが期待されます。しかし何年もの期待と数十億ドルの投資を経ても、あらゆる状況に対応できる真の完全自動運転車は公道では依然として稀です。最大の障壁は安全性です。現在のシステムは、急な割り込み、攻撃的なドライバー、あるいは判別の難しい交差点などの異常で重大な状況に苦戦しています。本稿は、こうした稀でありながら重要な瞬間を標的にする新しい訓練手法を紹介し、安全性を人間レベルに近づけ、より広い普及を可能にすることを目指します。
見えにくい「稀な危険」の問題
大部分の運転は平穏です:車は車線を守り、車間距離を保ち、大きなトラブルは起きません。学習アルゴリズムにとって、これは驚くほど悪い知らせです。現代の自動運転車は深層学習に依存しており、大量のデータからパターンを見つけることで性能が向上します。しかし、重大な衝突やニアクラッシュはその膨大な正常運転の海の中では極めて稀です。車両が少しでも安全になると、最も危険な出来事はさらに稀になり、学習プロセスが最も必要とするデータが不足します。著者らはこれを「希少性の呪い」と呼んでいます。これが学習に高い不確実性をもたらし、実際には安全性の停滞を招きます:ある状況で性能を改善すると別の状況で悪化するという代償、彼らはこれを「シーソー効果」と名付けています。
衝突データだけで学ぶことの裏目
多くの開発者は、失敗事例に注目することでこの希少性の問題を打破しようとします:最悪の衝突や厄介なエッジケースを再生し、それらのミスを避けるようにシステムを訓練します。しかし本研究は、この直感的な戦略が誤導的になり得ることを示します。衝突データに集中するとバイアスが導入され、システムは限られた一連のシナリオに非常に強くなる一方で、他の同等に重要な状況で知らず識らずのうちに悪化してしまう可能性があります。言い換えれば、学習プロセスが方向を見失うのです。手作りのルールで明らかな危険を防ぐルールベースの安全レイヤーは一部の状況では有効ですが、現実の交通が持つ巨大な多様性と複雑さには対応が難しいです。これらのアプローチだけでは全体的な安全性を継続的に向上させるには不十分でした。
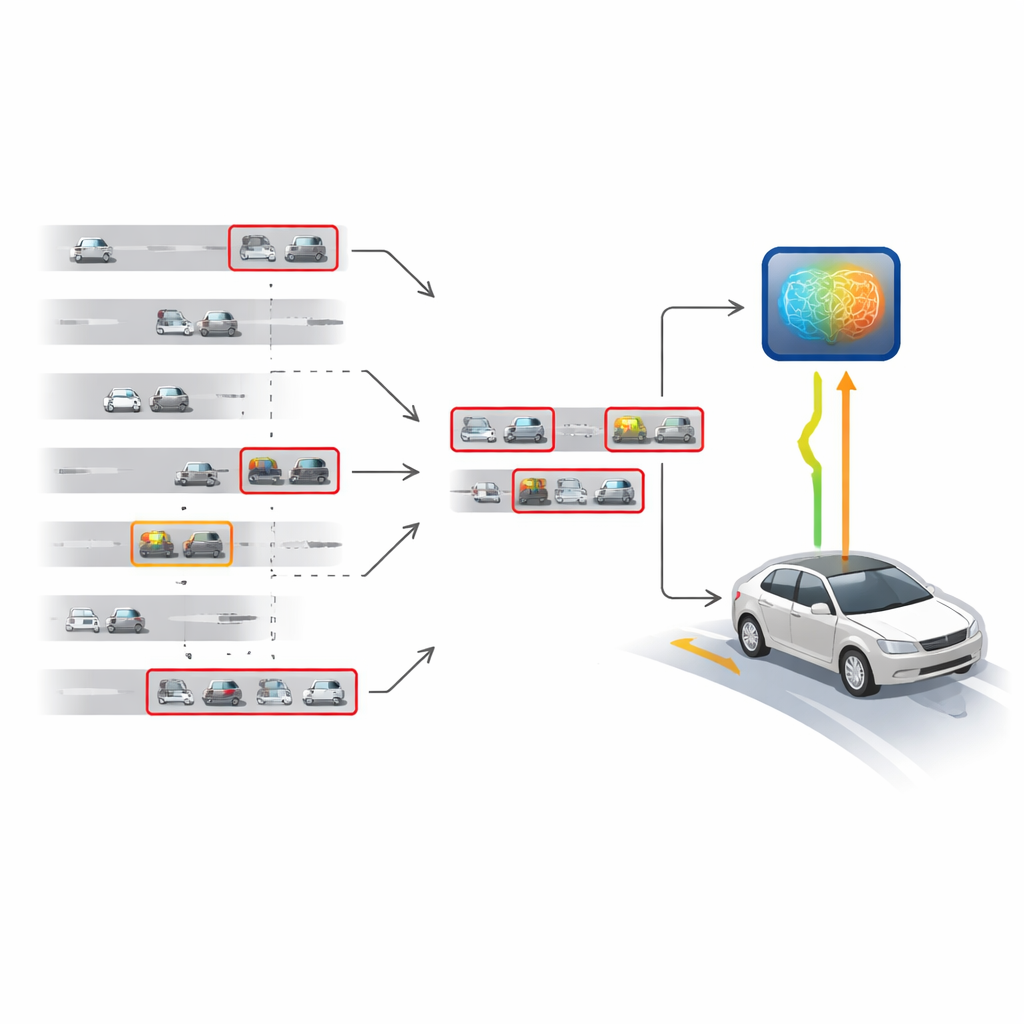
あらゆる有用な瞬間を活かす
著者らは、単にデータを増やすのではなく訓練データを再構成する「密な学習(dense learning)」戦略を提案します。すべての運転時刻を同等に扱うのではなく、シミュレーションと実世界のエピソードの両方を精査して、最も情報量の多いものだけを残します。これには、より良い判断で回避できたはずの衝突(回避可能な衝突)だけでなく、衝突寸前まで行ったが回避に成功した「ニアミス」も含まれます。長い運転エピソードは安全上重要な時間の断片に切り詰められ、それらの断片を再結合してコンパクトで情報密度の高い訓練セットが作られます。学習された安全スコアが自動的にリスクの高い状態をフラグし、追跡的(レトロスペクティブ)なステップで最新の運転方針に対して過去データを反事実シミュレーションで再検証します。この三層の密化—エピソードレベル、状態レベル、追跡レベル—によって、学習のランダム性が大幅に減りつつ、訓練信号の正直さが保たれます。
多様な車両に対する安全の共乗者
この密な学習パイプラインを用いて、研究チームは「SafeDriver」と呼ばれる安全重視の運転エージェントを訓練しました。既存の自動運転システムを置き換えるのではなく、SafeDriverは保護的な共乗者のように振る舞います:通常時はベースのシステムが制御しますが、学習された安全スコアが危険な状況を検知したときに、SafeDriverが一時的にブレーキや操舵を引き継いで危機を回避します。研究者らはこのアイデアを様々な条件で試験しました:高速多車線の高速道路、複雑なラウンドアバウト、大規模な実世界運転データセットから構築した都市の道路網などです。シミュレーションでは、SafeDriverを追加することで基礎システム単体と比べて衝突率が約1〜2桁低下し、特に「回避可能」な衝突はさらに急激に減少しました。
シミュレーションから試験トラックへ
この手法がコンピュータ外でも有効かを確かめるため、チームはオープンソースのAutowareを搭載した実車のリンカーンセダンにSafeDriverを装備し、Mcityの試験トラックで混合現実(ミックスドリアリティ)セットアップを用いて評価しました。仮想の車両や信号が実際のカメラ映像に重ね合わされ、実際の道路利用者を危険にさらすことなく再現可能で高リスクなシナリオを実行できます。物理車両の挙動に合わせてシミュレータを慎重に調整した結果、トラック試験においてSafeDriverは全体の衝突率を約90%、回避可能な衝突をほぼ99%削減することが示されました。同じ密化した訓練は、4都市にまたがる大規模で多様な都市プランニングベンチマーク上でも性能を向上させました。
日常のドライバーにとっての意味
平たく言えば、この研究はより安全な自動運転車への道は単にデータ量の増加ではなく、データの賢い選別にあることを示しています。安全がかかった稀な瞬間—接近した事態や回避可能だった衝突の両方—に訓練を集中することで、密な学習法は他を犠牲にすることなく改善のためのより明確で安定した信号を提供します。医療用ロボットや航空機など他の安全クリティカルな機械へこの考えを拡張するにはさらなる研究が必要ですが、これらの結果は自動運転車が現在の安全性の停滞を打破する可能性を示唆しています。広く採用されれば、このような手法は自動運転技術を、公衆が車に自律運転を任せる前に期待する信頼性の水準に大きく近づけるかもしれません。
引用: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
キーワード: 自動運転車, 自動運転の安全性, 強化学習, 稀な事象, 機械学習の訓練データ