Clear Sky Science · sv
Bryta igenom säkerhetsprestandans stillastående i autonoma fordon med dense learning
Varför säkrare självkörande bilar spelar roll
Självkörande bilar lovar färre olyckor, mindre trafik och ökad rörlighet för alla. Trots år av hypen och miljardinvesteringar är verkligt förarlösa bilar som klarar alla förhållanden fortfarande sällsynta på allmänna vägar. Huvudhindret är säkerhet: dagens system har svårt med ovanliga, höginsats‑situationer som plötsliga filbyten, aggressiva förare eller förvirrande korsningar. Denna artikel presenterar ett nytt sätt att träna autonoma fordon som riktar in sig på dessa sällsynta men avgörande ögonblick, med målet att pressa säkerheten nära människors nivåer och möjliggöra bredare användning.
Det dolda problemet med sällsynta faror
För det mesta är bilkörning händelselös: fordon håller filen, håller avstånd och inget allvarligt händer. För inlärningsalgoritmer är detta överraskande dåliga nyheter. Moderna autonoma fordon förlitar sig på djupinlärning, som förbättras genom att upptäcka mönster i enorma mängder data. Men allvarliga olyckor och nära‑olyckor är mycket sällsynta i detta hav av normal körning. När fordon blir lite säkrare blir de farligaste händelserna ännu mer sällsynta, vilket svälter ut inlärningsprocessen från det den mest behöver. Författarna kallar detta för "sällsynthetens förbannelse". Det leder till hög osäkerhet i träningen och i praktiken till en sorts säkerhetsstagnation: att åtgärda prestanda i en situation kan göra det sämre i en annan, en avvägning de beskriver som en "gunga‑effekt."
Varför det backar när man lär endast från krascher
Många utvecklare försöker överkomma sällsynthetsproblemet genom att fokusera på fel: de återspelar de värsta krockarna och problematiska kantfallen och tränar sina system att undvika just dessa misstag. Studien visar att denna intuitiva strategi kan vara missvisande. Att koncentrera sig enbart på kraschdata inför förskjutning: systemet kan bli mycket bra i en liten uppsättning scenarier samtidigt som det omedvetet blir sämre i andra, lika viktiga situationer. Med andra ord pressas inlärningsprocessen ur kurs. Regelbaserade säkerhetslager, som använder handbyggda regler för att förhindra uppenbara faror, hjälper i vissa situationer men har svårt med den enorma variationen och komplexiteten i verklig trafik. Tillsammans har dessa angreppssätt inte varit tillräckliga för att kontinuerligt förbättra den övergripande säkerheten.
Att göra varje användbart ögonblick betydelsefullt
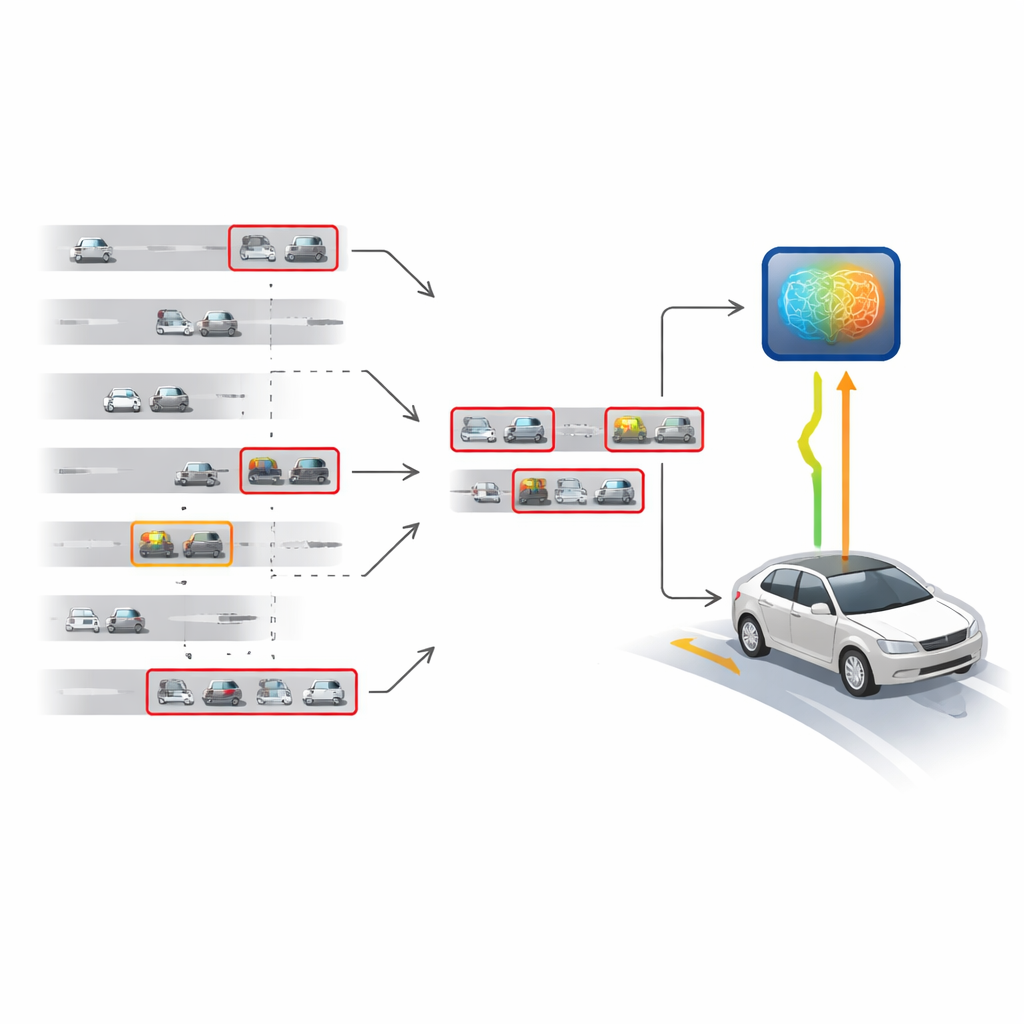
Författarna föreslår en "dense learning"‑strategi som omformar träningsdatan istället för att bara lägga till mer av den. Istället för att behandla alla körögonblick lika silar de igenom både simulerade och verkliga episoder för att behålla endast de mest informativa. Dessa inkluderar inte bara undvikbara krascher — där ett bättre beslut hade kunnat förhindra en kollision — utan också "närmishändelser", där en krasch nästan inträffade men framgångsrikt undveks. Långa körepisoder beskärs för att behålla endast de säkerhetskritiska tidssegmenten, och dessa segment kopplas om för att bilda ett kompakt, informationsrikt träningsset. En inlärd säkerhetspoäng hjälper automatiskt till att flagga riskfyllda tillstånd, och ett retrospektivt steg kontrollerar om tidigare data stämmer med den senaste körpolicyn med hjälp av kontrafaktisk simulering. Denna tredelade förtätning — episodnivå, tillståndsnivå och retrospektiv — minskar slumpen i inlärningen avsevärt samtidigt som träningssignalen hålls ärlig.
En säkerhets‑co‑förare för många fordons typer
Med denna dense learning‑pipeline tränar teamet en säkerhetsfokuserad köragent kallad "SafeDriver." Istället för att ersätta ett befintligt autonomt körsystem agerar SafeDriver som en skyddande co‑förare: under normala förhållanden styr bassystemet, men när den inlärda säkerhetspoängen upptäcker en farlig situation tar SafeDriver tillfälligt över bromsning och styrning för att föra bilen ur fara. Forskarna testar idén över en rad förhållanden: högfartsflefältsmotorvägar, komplexa rondeller och urbana gatunät byggda från stora verkliga kördatamängder. I simuleringar minskar SafeDriver kraschfrekvenser med ungefär en till två storleksordningar jämfört med underliggande system ensamma, och minskar "undvikbara" krascher ännu kraftigare.
Från simulering till testbana
För att se om tillvägagångssättet håller utanför datorn utrustar teamet en riktig Lincoln‑sedan som kör det öppna Autoware‑systemet med SafeDriver och utvärderar den på Mcity‑testbanan med en mixed‑reality‑uppsättning. Virtuella bilar och trafikljus blandas in i den verkliga kamerabilden, vilket möjliggör repeterbara, hög‑risk‑scenarier utan att äventyra mänskliga trafikanter. Efter noggrann justering av simulatorn för att matcha den fysiska bilens beteende visar de att SafeDriver minskar den totala kraschfrekvensen i bantester med ungefär 90 procent, och undvikbara krascher med nästan 99 procent. Samma förtätade träning förbättrar också prestanda på ett stort, varierat benchmark för stadsplanering över fyra städer.
Vad detta betyder för vardagliga förare
Enkelt uttryckt visar detta arbete att vägen till säkrare självkörande bilar inte bara är mer data, utan smartare data. Genom att koncentrera träningen på de sällsynta ögonblicken då säkerheten står på spel — både nära‑kollisionerna och de krascher som hade kunnat undvikas — ger dense learning‑metoden en klarare, mer stabil signal för förbättring utan att offra prestanda på andra områden. Medan mer forskning behövs för att överföra idén till andra säkerhetskritiska maskiner, såsom medicinska robotar eller flygplan, tyder dessa resultat på att autonoma fordon kan bryta sig ur sin nuvarande säkerhetsplatå. Om metoder som denna blir allmänt antagna kan självkörande teknik komma mycket närmare den tillförlitlighetsnivå som allmänheten förväntar sig innan man litar på att bilar kör sig själva.
Citering: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Nyckelord: autonoma fordon, självkörandesäkerhet, förstärkningsinlärning, sällsynta händelser, maskininlärnings träningsdata