Clear Sky Science · pt
Superando a estagnação de desempenho em segurança de veículos autônomos com aprendizado denso
Por que carros autônomos mais seguros importam
Carros autônomos prometem menos acidentes, menos congestionamento e mais mobilidade para todos. Ainda assim, após anos de expectativa e bilhões de dólares investidos, carros verdadeiramente sem motorista que lidam com todas as condições continuam raros nas vias públicas. O principal entrave é a segurança: os sistemas atuais têm dificuldade com situações incomuns e de alto risco, como uma entrada repentina de outro veículo, um motorista agressivo ou um cruzamento confuso. Este artigo apresenta uma nova forma de treinar veículos autônomos que mira esses momentos raros, porém cruciais, com o objetivo de aproximar a segurança do nível humano e viabilizar uma adoção mais ampla.
O problema oculto dos perigos raros
Na maior parte do tempo, dirigir é sem incidentes: os carros seguem faixas, mantêm distância e nada de ruim acontece. Para algoritmos de aprendizado, isso é surpreendentemente ruim. Veículos autônomos modernos dependem de aprendizado profundo, que melhora ao identificar padrões em enormes quantidades de dados. Mas colisões graves e quase‑acidentes são muito raros nesse mar de direção normal. Conforme os veículos ficam um pouco mais seguros, os eventos mais perigosos tornam‑se ainda mais raros, privando o processo de aprendizado do que ele mais precisa. Os autores chamam isso de “maldição da raridade.” Isso gera alta incerteza no treinamento e, na prática, uma espécie de estagnação de segurança: consertar o desempenho em uma situação pode piorar em outra, uma troca que eles descrevem como um “efeito gangorra.”
Por que aprender apenas com acidentes dá errado
Muitos desenvolvedores tentam vencer esse problema da raridade focando nas falhas: repassam os piores acidentes e casos-limite problemáticos e treinam seus sistemas para evitar aqueles erros específicos. O estudo mostra que essa estratégia intuitiva pode ser enganosa. Concentrar‑se apenas em dados de colisão introduz viés: o sistema pode ficar muito bom em um pequeno conjunto de cenários enquanto, sem perceber, piora em outros igualmente importantes. Em outras palavras, o processo de aprendizado é deslocado de seu rumo. Camadas de segurança baseadas em regras, que usam regras criadas manualmente para prevenir perigos óbvios, ajudam em algumas situações, mas têm dificuldade com a enorme variedade e complexidade do tráfego real. Juntas, essas abordagens não têm sido suficientes para melhorar continuamente a segurança geral.
Fazendo cada momento útil contar
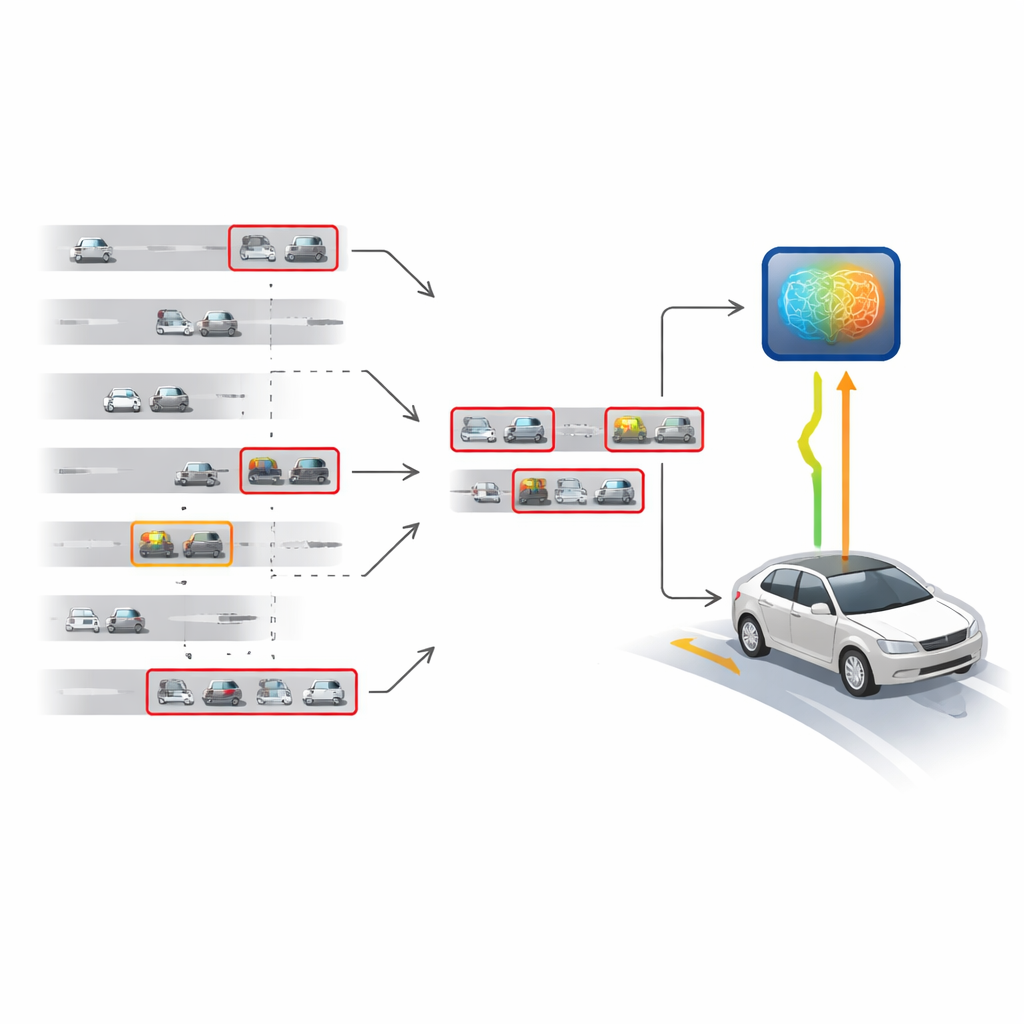
Os autores propõem uma estratégia de “aprendizado denso” que reconfigura os dados de treinamento em vez de simplesmente aumentar sua quantidade. Em vez de tratar todos os momentos de direção igualmente, eles filtram episódios simulados e do mundo real para manter apenas os mais informativos. Isso inclui não apenas colisões evitáveis, onde uma decisão melhor teria prevenido o impacto, mas também “quase‑acidentes”, em que uma colisão quase ocorreu mas foi evitada com sucesso. Episódios longos de condução são então recortados para reter apenas os trechos críticos para a segurança, e esses trechos são reconectados para formar um conjunto de treinamento compacto e rico em informação. Uma pontuação de segurança aprendida ajuda a sinalizar automaticamente estados de risco, e um passo retrospectivo reavalia dados passados contra a política de condução mais recente usando simulação contrafactual. Essa densificação em três camadas — nível de episódio, nível de estado e retrospectiva — reduz muito a aleatoriedade no aprendizado enquanto mantém o sinal de treinamento fiel.
Um copiloto de segurança para muitos tipos de veículos
Usando esse pipeline de aprendizado denso, a equipe treina um agente de condução focado em segurança chamado “SafeDriver.” Em vez de substituir um sistema de direção autônoma existente, o SafeDriver funciona como um copiloto protetor: em condições normais, o sistema base assume o controle, mas quando a pontuação de segurança detectada indica uma situação perigosa, o SafeDriver assume brevemente a frenagem e a direção para tirar o carro da situação de risco. Os pesquisadores testam essa ideia em várias condições: rodovias de múltiplas faixas em alta velocidade, rotatórias complexas e redes urbanas construídas a partir de grandes conjuntos de dados de direção do mundo real. Em simulações, adicionar o SafeDriver reduz as taxas de colisão em cerca de uma a duas ordens de magnitude em comparação com os sistemas subjacentes sozinhos, e diminui ainda mais as colisões “evitáveis.”
Da simulação para a pista de testes
Para verificar se a abordagem se sustenta fora do computador, a equipe equipou um sedan Lincoln real rodando o sistema de código aberto Autoware com o SafeDriver e o avaliou na pista de testes Mcity usando um ambiente de realidade mista. Carros virtuais e semáforos são misturados na visão da câmera real, permitindo cenários de alto risco repetíveis sem colocar usuários humanos da via em perigo. Após ajustar cuidadosamente o simulador para corresponder ao comportamento do carro físico, mostram que o SafeDriver reduz a taxa geral de colisões nos testes na pista em cerca de 90%, e as colisões evitáveis em quase 99%. O mesmo treinamento densificado também melhora o desempenho em um grande benchmark urbano diversificado que engloba quatro cidades.
O que isso significa para motoristas no dia a dia
Em termos claros, este trabalho mostra que o caminho para carros autônomos mais seguros não é apenas mais dados, mas dados mais inteligentes. Ao concentrar o treinamento nos momentos raros em que a segurança está em jogo — tanto nas chegadas perigosas quanto nas colisões que poderiam ter sido evitadas — o método de aprendizado denso fornece um sinal de melhoria mais claro e estável, sem sacrificar desempenho em outros cenários. Embora sejam necessárias mais pesquisas para estender a ideia a outras máquinas críticas para segurança, como robôs médicos ou aeronaves, esses resultados sugerem que veículos autônomos podem romper o platô de segurança atual. Se amplamente adotadas, abordagens como essa podem aproximar a tecnologia de direção autônoma do nível de confiabilidade que o público espera antes de confiar aos carros a tarefa de dirigir sozinhos.
Citação: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Palavras-chave: veículos autônomos, segurança de carros autônomos, aprendizado por reforço, eventos raros, dados de treinamento de aprendizado de máquina