Clear Sky Science · de
Durchbruch bei stagnierender Sicherheitsleistung autonomer Fahrzeuge durch dichtes Lernen
Warum sicherere selbstfahrende Autos wichtig sind
Selbstfahrende Autos versprechen weniger Unfälle, weniger Staus und mehr Mobilität für alle. Doch nach Jahren des Hypes und Milliardeninvestitionen sind wirklich fahrerlose Autos, die unter allen Bedingungen zurechtkommen, auf öffentlichen Straßen immer noch selten. Das Hauptproblem ist die Sicherheit: Die heutigen Systeme tun sich schwer mit ungewöhnlichen, risikoreichen Situationen wie plötzlichen Spurwechseln anderer Fahrzeuge, aggressiven Fahrern oder verwirrenden Kreuzungen. Dieses Papier stellt eine neue Trainingsmethode für autonome Fahrzeuge vor, die genau diese seltenen, aber entscheidenden Momente ins Visier nimmt, mit dem Ziel, die Sicherheit näher an menschliches Niveau zu bringen und eine breitere Einführung zu ermöglichen.
Das verborgene Problem seltener Gefahren
Die meiste Zeit verläuft Fahren ereignislos: Autos halten die Spur, wahren Abstand und es passiert nichts Außergewöhnliches. Für Lernalgorithmen ist das überraschend schlechte Nachricht. Moderne autonome Fahrzeuge beruhen auf Deep Learning, das durch das Erkennen von Mustern in riesigen Datenmengen besser wird. Schwere Unfälle und Beinaheunfälle sind in diesem Meer normalen Fahrens jedoch sehr selten. Wenn Fahrzeuge etwas sicherer werden, werden die gefährlichsten Ereignisse noch seltener und berauben den Lernprozess dessen, was er am dringendsten braucht. Die Autoren nennen dieses Phänomen den „Fluch der Seltenheit“. Er führt zu hoher Unsicherheit beim Training und in der Praxis zu einer Art Sicherheitsstagnation: Die Verbesserung der Leistung in einer Situation kann in einer anderen schlechter werden — ein Trade‑off, den sie als „Wippeffekt“ beschreiben.
Warum Lernen nur aus Unfällen nach hinten losgeht
Viele Entwickler versuchen, das Seltenheitsproblem zu umgehen, indem sie sich auf Fehlfunktionen konzentrieren: Sie spielen die schlimmsten Unfälle und problematischen Randfälle erneut ab und trainieren ihre Systeme darauf, genau diese Fehler zu vermeiden. Die Studie zeigt, dass diese intuitive Strategie irreführend sein kann. Die ausschließliche Konzentration auf Unfalldaten führt zu Verzerrungen: Das System kann in einer kleinen Menge von Szenarien sehr gut werden, während es in anderen, ebenso wichtigen Situationen unbeabsichtigt schlechter wird. Anders gesagt: Der Lernprozess wird fehlgeleitet. Regelbasierte Sicherheitsschichten, die handgefertigte Regeln zur Vermeidung offensichtlicher Gefahren nutzen, helfen in manchen Fällen, kämpfen jedoch mit der enormen Vielfalt und Komplexität des realen Verkehrs. Zusammen waren diese Ansätze nicht ausreichend, um die Gesamtsicherheit kontinuierlich zu verbessern.
Jeden nützlichen Moment zählen lassen
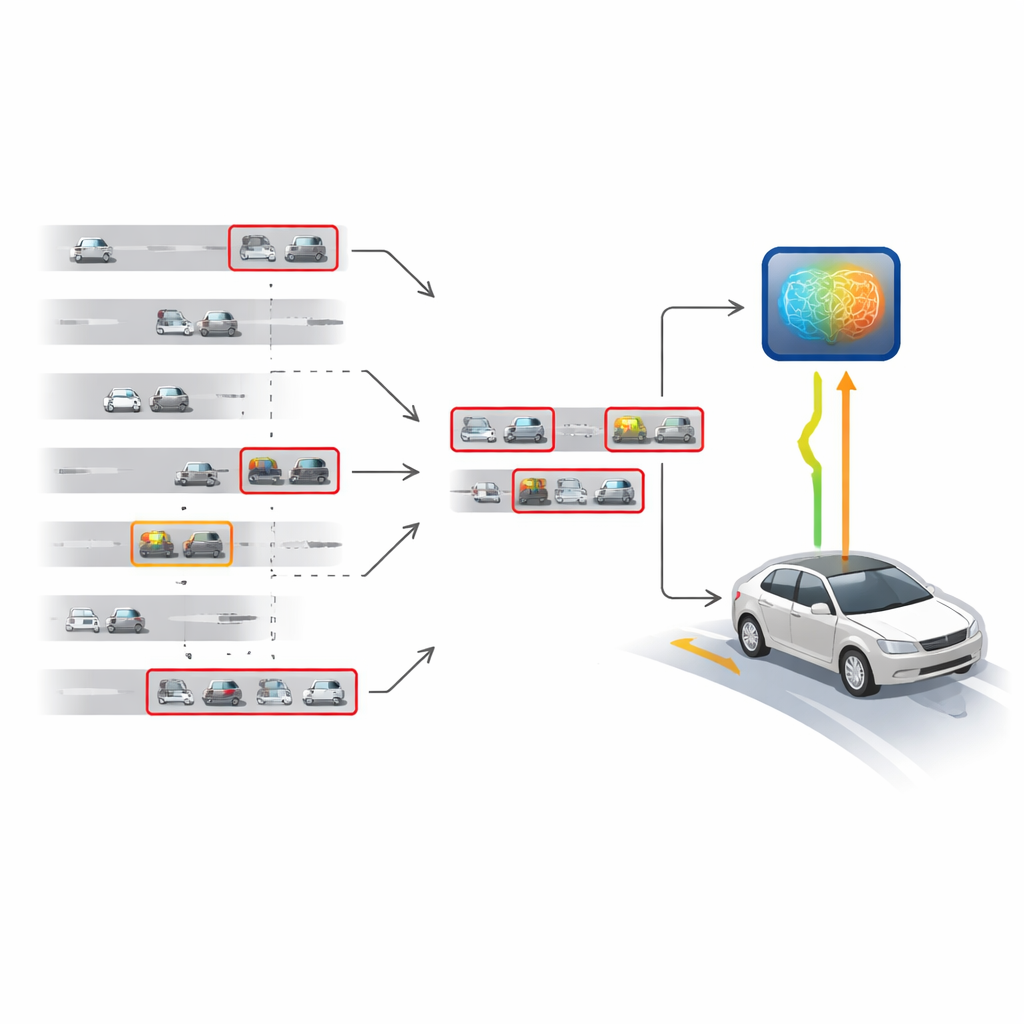
Die Autoren schlagen eine „dichte Lern“-Strategie vor, die die Trainingsdaten umgestaltet, statt einfach nur mehr davon hinzuzufügen. Anstatt alle Fahrmomente gleich zu behandeln, sichten sie sowohl simulierte als auch reale Episoden, um nur die informativsten zu behalten. Dazu gehören nicht nur vermeidbare Unfälle, bei denen eine bessere Entscheidung den Zusammenstoß verhindert hätte, sondern auch „Beinaheunfälle“, bei denen eine Kollision fast passiert wäre, aber erfolgreich vermieden wurde. Lange Fahrtsequenzen werden dann auf die sicherheitskritischen Zeitabschnitte zugeschnitten, und diese Abschnitte werden wieder miteinander verbunden, um einen kompakten, informationsreichen Trainingssatz zu bilden. Ein gelernter Sicherheitswert hilft, riskante Zustände automatisch zu markieren, und ein retrospektiver Schritt überprüft vergangene Daten anhand der neuesten Fahrpolitik mithilfe kontrafaktischer Simulationen. Diese dreistufige Verdichtung — auf Episoden‑, Zustands‑ und retrospektiver Ebene — verringert die Zufälligkeit im Lernen stark, während das Trainingssignal ehrlich bleibt.
Ein Sicherheits‑Co‑Pilot für viele Fahrzeugtypen
Mit dieser dichten Lernpipeline trainiert das Team einen sicherheitsfokussierten Fahragenten namens „SafeDriver“. Anstatt ein bestehendes autonomes Fahrsystem zu ersetzen, agiert SafeDriver wie ein schützender Beifahrer: Unter normalen Bedingungen ist das Basissystem in Kontrolle, aber wenn der gelernte Sicherheitswert eine gefährliche Situation erkennt, übernimmt SafeDriver kurzzeitig das Bremsen und Lenken, um das Fahrzeug aus der Gefahr zu bringen. Die Forscher testen diese Idee in unterschiedlichen Bedingungen: schnelle mehrspurige Autobahnen, komplexe Kreisverkehre und städtische Straßennetze, die aus großen realen Fahrdatensätzen aufgebaut wurden. In Simulationen senkt die Ergänzung durch SafeDriver die Unfallraten um etwa eine bis zwei Größenordnungen im Vergleich zu den zugrundeliegenden Systemen allein und reduziert vermeidbare Unfälle noch deutlicher.
Von der Simulation zur Teststrecke
Um zu prüfen, ob der Ansatz außerhalb des Computers funktioniert, rüstet das Team eine reale Lincoln‑Limousine mit dem Open‑Source‑System Autoware mit SafeDriver aus und bewertet sie auf der Mcity‑Teststrecke in einer Mixed‑Reality‑Aufstellung. Virtuelle Fahrzeuge und Ampeln werden in das reale Kamerabild eingeblendet, sodass wiederholbare, hochriskante Szenarien möglich sind, ohne reale Verkehrsteilnehmer zu gefährden. Nach sorgfältigem Abgleich des Simulators mit dem Verhalten des physischen Fahrzeugs zeigen sie, dass SafeDriver die Gesamtunfallrate in Streckentests um etwa 90 Prozent reduziert und vermeidbare Unfälle um nahezu 99 Prozent. Dasselbe verdichtete Training verbessert zudem die Leistung in einem großen, vielfältigen Benchmark zur Stadtplanung über vier Städte hinweg.
Was das für Alltagsfahrer bedeutet
Einfach gesagt zeigt diese Arbeit, dass der Weg zu sichereren selbstfahrenden Autos nicht nur mehr Daten ist, sondern klügere Daten. Indem das Training auf die seltenen Momente konzentriert wird, in denen die Sicherheit auf dem Spiel steht — sowohl die Beinaheunfälle als auch die vermeidbaren Zusammenstöße — liefert die dichte Lernmethode ein klareres, stabileres Signal für Verbesserungen, ohne die Leistung in anderen Bereichen zu opfern. Zwar ist weitere Forschung nötig, um die Idee auf andere sicherheitskritische Maschinen wie medizinische Roboter oder Flugzeuge auszudehnen, doch deuten diese Ergebnisse darauf hin, dass autonome Fahrzeuge aus ihrer derzeitigen Sicherheitsplateau ausbrechen können. Wenn solche Ansätze weit verbreitet übernommen werden, könnten sie die Selbstfahrtechnologie deutlich näher an das Zuverlässigkeitsniveau bringen, das die Öffentlichkeit erwartet, bevor sie Fahrzeugen das autonome Fahren anvertraut."
Zitation: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Schlüsselwörter: autonome Fahrzeuge, Sicherheit selbstfahrender Autos, Verstärkendes Lernen, seltene Ereignisse, Trainingsdaten für maschinelles Lernen