Clear Sky Science · it
Superare la stagnazione delle prestazioni di sicurezza nei veicoli autonomi con l’apprendimento denso
Perché le auto a guida autonoma più sicure contano
Le auto a guida autonoma promettono meno incidenti, meno traffico e più mobilità per tutti. Eppure, dopo anni di clamore e miliardi di dollari investiti, le auto veramente senza conducente in grado di gestire tutte le condizioni sono ancora rare sulle strade pubbliche. L’ostacolo principale è la sicurezza: i sistemi attuali faticano con situazioni insolite e ad alto rischio come un taglio improvviso in corsia, un conducente aggressivo o un incrocio confuso. Questo articolo introduce un nuovo modo di addestrare i veicoli autonomi che mira proprio a quei momenti rari ma cruciali, con l’obiettivo di spingere la sicurezza vicino ai livelli umani e sbloccare una diffusione più ampia.
Il problema nascosto dei pericoli rari
La maggior parte delle volte, guidare è privo di eventi: le auto seguono le corsie, mantengono la distanza e non succede nulla di grave. Per gli algoritmi di apprendimento, questa è una cattiva notizia sorprendente. I veicoli autonomi moderni si basano sul deep learning, che migliora riconoscendo schemi in enormi quantità di dati. Ma gli incidenti gravi e i quasi‑incidenti sono molto rari in quel mare di guida normale. Man mano che i veicoli diventano un po’ più sicuri, gli eventi più pericolosi diventano ancora più rari, privando il processo di apprendimento di ciò di cui ha più bisogno. Gli autori chiamano questo fenomeno la “maledizione della rarità.” Porta a grande incertezza nell’addestramento e, in pratica, a una sorta di stagnazione della sicurezza: migliorare le prestazioni in una situazione può peggiorarle in un’altra, un compromesso che descrivono come “effetto altalena”.
Perché imparare solo dagli incidenti fallisce
Molti sviluppatori cercano di risolvere questo problema della rarità concentrandosi sui fallimenti: riproducono i peggiori incidenti e i casi limite problematici, poi addestrano i loro sistemi per evitare quegli errori specifici. Lo studio mostra che questa strategia intuitiva può essere fuorviante. Concentrarsi solo sui dati degli incidenti introduce bias: il sistema può diventare molto bravo in un piccolo insieme di scenari mentre inconsapevolmente peggiora in altri, ugualmente importanti. In altre parole, il processo di apprendimento viene deviato. Strati di sicurezza basati su regole, che impiegano regole costruite a mano per prevenire pericoli evidenti, aiutano in alcune situazioni ma faticano con l’enorme varietà e complessità del traffico reale. Insieme, questi approcci non sono stati sufficienti per migliorare continuamente la sicurezza complessiva.
Far valere ogni momento utile
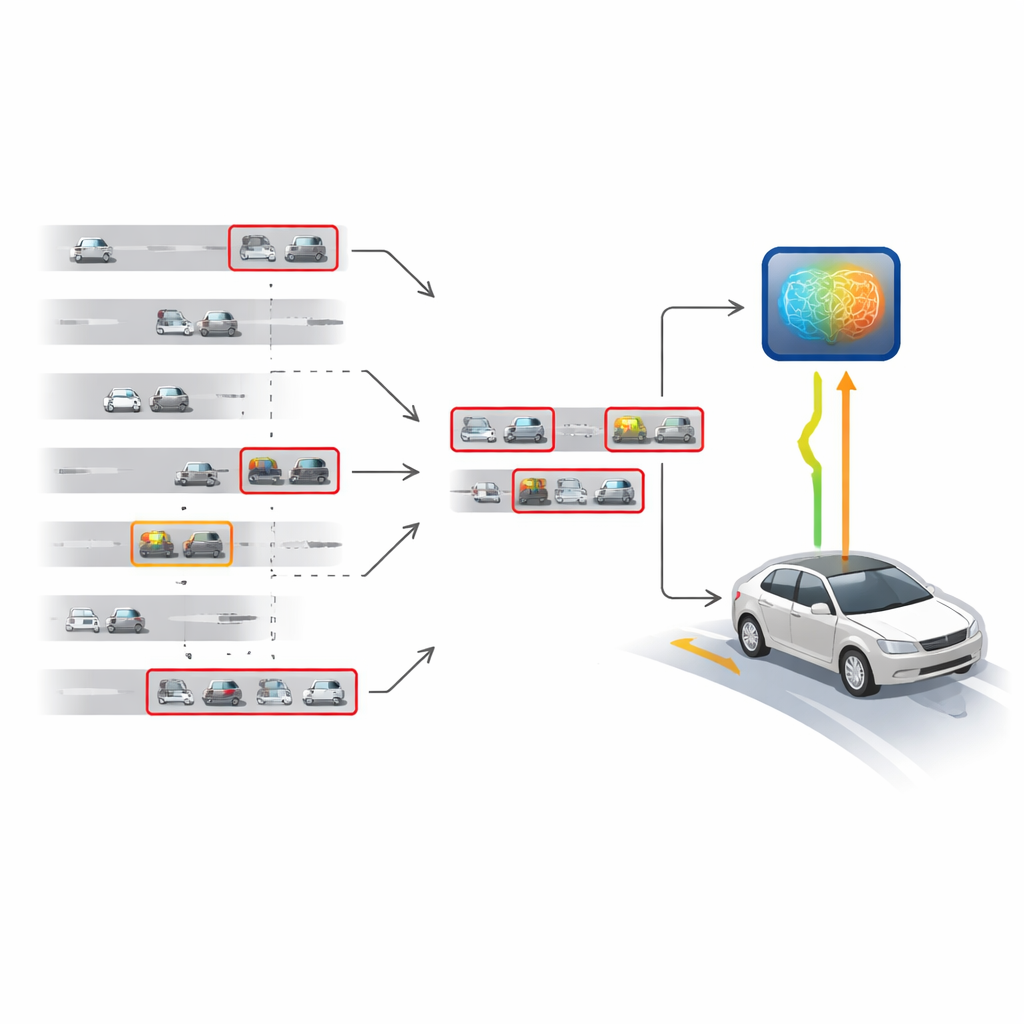
Gli autori propongono una strategia di “apprendimento denso” che rimodella i dati di addestramento invece di limitarsi ad aggiungerne di più. Piuttosto che trattare tutti i momenti di guida allo stesso modo, setacciano episodi simulati e del mondo reale per mantenere solo quelli più informativi. Questi includono non solo gli incidenti evitabili, dove una decisione migliore avrebbe impedito l’impatto, ma anche i “quasi‑incidenti”, dove la collisione è stata sfiorata ma è stata evitata con successo. Gli episodi di guida lunghi vengono quindi tagliati per conservare solo le fette temporali critiche per la sicurezza, e queste fette vengono ricollegate per formare un set di addestramento compatto e ricco di informazioni. Un punteggio di sicurezza appreso aiuta a segnalare automaticamente gli stati rischiosi, e un passo retrospettivo riesamina i dati passati rispetto all’ultima politica di guida usando simulazioni controfattuali. Questa densificazione a tre livelli—a livello di episodio, a livello di stato e retrospettiva—riduce notevolmente la casualità nell’apprendimento mantenendo il segnale di addestramento onesto.
Un co‑pilota di sicurezza per molti tipi di auto
Usando questa pipeline di apprendimento denso, il team addestra un agente di guida focalizzato sulla sicurezza chiamato “SafeDriver.” Piuttosto che sostituire un sistema di guida autonoma esistente, SafeDriver agisce come un co‑pilota protettivo: in condizioni normali il sistema di base è al comando, ma quando il punteggio di sicurezza appreso rileva una situazione pericolosa, SafeDriver prende temporaneamente il controllo della frenata e dello sterzo per uscire dalla situazione critica. I ricercatori testano questa idea in una varietà di condizioni: autostrade multi‑corsia ad alta velocità, rotonde complesse e reti stradali urbane costruite a partire da grandi dataset di guida reali. Nelle simulazioni, aggiungere SafeDriver riduce i tassi di incidente di circa uno‑due ordini di grandezza rispetto ai sistemi sottostanti da soli, e diminuisce gli incidenti “evitabili” in modo ancora più marcato.
Dalla simulazione alla pista di prova
Per verificare se l’approccio regge fuori dal computer, il team equipaggia una vera berlina Lincoln che esegue il sistema open‑source Autoware con SafeDriver e la valuta sulla pista di prova Mcity usando un setup di realtà mista. Auto virtuali e semafori vengono integrati nella vista della telecamera reale, permettendo scenari ad alto rischio ripetibili senza mettere in pericolo gli utenti della strada. Dopo aver sintonizzato con cura il simulatore per corrispondere al comportamento della vettura fisica, dimostrano che SafeDriver riduce il tasso complessivo di incidenti nei test in pista di circa il 90 percento, e gli incidenti evitabili di quasi il 99 percento. Lo stesso addestramento densificato migliora anche le prestazioni su un ampio e diversificato benchmark di pianificazione urbana che copre quattro città.
Cosa significa per gli automobilisti di tutti i giorni
In parole semplici, questo lavoro mostra che la strada verso auto a guida autonoma più sicure non è solo più dati, ma dati più intelligenti. Concentrando l’addestramento sui momenti rari in cui la sicurezza è in bilico—sia i quasi‑incidenti sia gli incidenti che avrebbero potuto essere evitati—il metodo di apprendimento denso fornisce un segnale più chiaro e stabile per il miglioramento senza sacrificare le prestazioni altrove. Pur essendo necessarie ulteriori ricerche per estendere l’idea ad altre macchine critiche per la sicurezza, come robot medicali o aeromobili, questi risultati suggeriscono che i veicoli autonomi possono uscire dall’attuale plateau di sicurezza. Se adottati su larga scala, approcci come questo potrebbero avvicinare molto la tecnologia di guida autonoma al livello di affidabilità che il pubblico si aspetta prima di affidare le auto al loro funzionamento autonomo.
Citazione: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Parole chiave: veicoli autonomi, sicurezza della guida autonoma, apprendimento per rinforzo, eventi rari, dati di addestramento per il machine learning