Clear Sky Science · fr
Percer le plateau de performance en sécurité des véhicules autonomes grâce à l’apprentissage dense
Pourquoi des voitures autonomes plus sûres comptent
Les voitures autonomes promettent moins d’accidents, moins d’embouteillages et une mobilité accrue pour tous. Pourtant, après des années de battage médiatique et des milliards de dollars investis, les voitures réellement sans conducteur capables de gérer toutes les situations restent rares sur la voie publique. L’obstacle principal est la sécurité : les systèmes actuels peinent face à des situations inhabituelles et à forts enjeux, comme une insertion soudaine, un conducteur agressif ou une intersection déroutante. Cet article présente une nouvelle façon d’entraîner les véhicules autonomes qui cible ces moments rares mais cruciaux, visant à rapprocher la sécurité du niveau humain et à permettre un déploiement plus large.
Le problème caché des dangers rares
La plupart du temps, la conduite est sans histoire : les voitures suivent les voies, gardent leurs distances et rien de grave ne se produit. Pour les algorithmes d’apprentissage, c’est étonnamment une mauvaise nouvelle. Les véhicules autonomes modernes reposent sur l’apprentissage profond, qui s’améliore en repérant des motifs dans d’énormes volumes de données. Mais les accidents graves et les quasi‑accidents sont très rares dans cet océan de conduite normale. À mesure que les véhicules deviennent un peu plus sûrs, les événements les plus dangereux deviennent encore plus rares, privant le processus d’apprentissage de ce dont il a le plus besoin. Les auteurs appellent cela la « malédiction de la rareté ». Elle engendre une forte incertitude lors de l’entraînement et, en pratique, une sorte de stagnation de la sécurité : corriger les performances dans une situation peut les détériorer dans une autre, un compromis qu’ils qualifient d’« effet balançoire ».
Pourquoi n’apprendre qu’à partir des accidents se retourne contre nous
Beaucoup de développeurs tentent de contrer ce problème de rareté en se concentrant sur les échecs : ils rejouent les pires accidents et les cas limites problématiques, puis entraînent leurs systèmes à éviter ces erreurs particulières. L’étude montre que cette stratégie intuitive peut induire en erreur. Se focaliser uniquement sur les données d’accidents introduit un biais : le système peut devenir très performant sur un petit ensemble de scénarios tout en s’aggravant involontairement sur d’autres, tout aussi importants. Autrement dit, le processus d’apprentissage est détourné. Les couches de sécurité basées sur des règles, qui utilisent des règles conçues à la main pour prévenir les dangers évidents, aident dans certaines situations mais peinent face à l’immense variété et la complexité du trafic réel. Ensemble, ces approches n’ont pas suffi à améliorer continuellement la sécurité globale.
Faire compter chaque moment utile
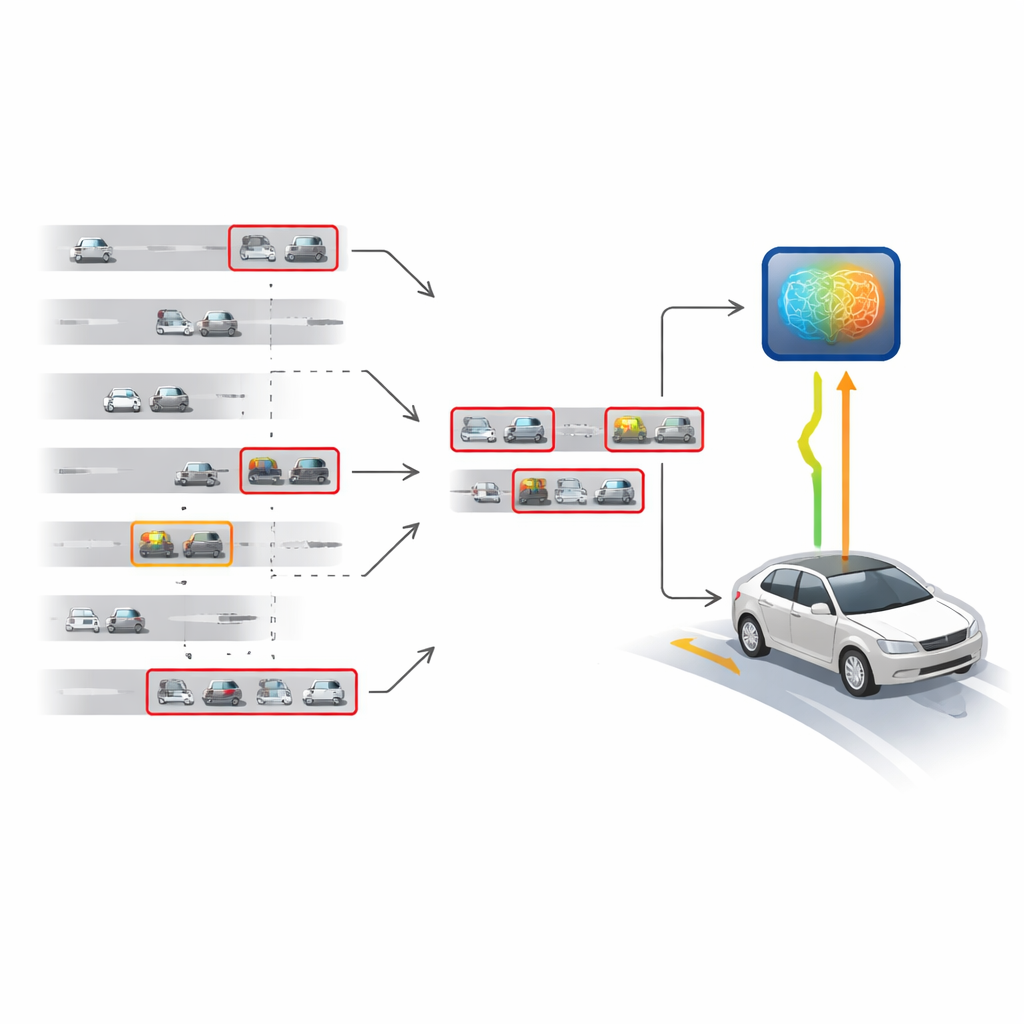
Les auteurs proposent une stratégie d’« apprentissage dense » qui remodèle les données d’entraînement au lieu de se contenter d’en ajouter davantage. Plutôt que de traiter tous les instants de conduite de la même manière, ils tamisent des épisodes simulés et réels pour ne garder que les plus informatifs. Ceux‑ci incluent non seulement les accidents évitables, où une meilleure décision aurait empêché l’impact, mais aussi les « quasi‑accidents », où une collision a failli se produire mais a été évitée avec succès. Les longs épisodes de conduite sont ensuite raccourcis pour ne retenir que les tranches de temps critiques pour la sécurité, et ces tranches sont reconnectées pour former un ensemble d’entraînement compact et riche en information. Un score de sécurité appris aide à signaler automatiquement les états à risque, et une étape rétrospective vérifie les données passées par rapport à la dernière politique de conduite à l’aide de simulations contrefactuelles. Cette densification en trois couches — au niveau des épisodes, des états et en mode rétrospectif — réduit fortement l’aléa dans l’apprentissage tout en préservant la fidélité du signal d’entraînement.
Un copilote de sécurité pour de nombreux types de voitures
En utilisant ce pipeline d’apprentissage dense, l’équipe entraîne un agent de conduite axé sur la sécurité appelé « SafeDriver ». Plutôt que de remplacer un système de conduite autonome existant, SafeDriver agit comme un copilote protecteur : en conditions normales, le système de base reste en charge, mais lorsque le score de sécurité détecte une situation dangereuse, SafeDriver prend brièvement le contrôle du freinage et de la direction pour sortir la voiture de la zone critique. Les chercheurs testent cette idée dans une variété de conditions : autoroutes multi‑voies à grande vitesse, ronds‑points complexes et réseaux urbains construits à partir de vastes jeux de données réels. En simulation, l’ajout de SafeDriver réduit les taux d’accidents d’environ un à deux ordres de grandeur par rapport aux systèmes sous‑jacents seuls, et réduit encore plus fortement les accidents « évitables ».
De la simulation à la piste d’essai
Pour vérifier si l’approche tient en dehors de l’ordinateur, l’équipe équipe une berline Lincoln réelle fonctionnant sous le système open‑source Autoware avec SafeDriver et l’évalue sur la piste d’essai Mcity en utilisant une configuration de réalité mixte. Des voitures virtuelles et des feux de circulation sont fusionnés à la vue caméra réelle, permettant des scénarios à haut risque répétables sans mettre en danger des usagers humains. Après avoir ajusté soigneusement le simulateur pour qu’il corresponde au comportement du véhicule physique, ils montrent que SafeDriver réduit le taux global d’accidents lors des essais sur piste d’environ 90 %, et les accidents évitables de près de 99 %. Le même entraînement densifié améliore également les performances sur un important benchmark d’urbanisme diversifié couvrant quatre villes.
Ce que cela signifie pour les conducteurs du quotidien
En termes simples, ce travail montre que la voie vers des voitures autonomes plus sûres n’est pas seulement une question de plus de données, mais de données plus intelligentes. En concentrant l’entraînement sur les moments rares où la sécurité est en jeu — à la fois les quasi‑accidents et les accidents qui auraient pu être évités —, la méthode d’apprentissage dense fournit un signal d’amélioration plus clair et plus stable sans sacrifier les performances ailleurs. Bien que des recherches supplémentaires soient nécessaires pour étendre l’idée à d’autres machines critiques pour la sécurité, comme les robots médicaux ou les avions, ces résultats suggèrent que les véhicules autonomes peuvent sortir de leur plateau actuel en matière de sécurité. Si ces approches sont largement adoptées, elles pourraient rapprocher la technologie de conduite autonome du niveau de fiabilité que le public attend avant de faire confiance aux voitures pour se conduire seules.
Citation: Feng, S., Zhu, H., Sun, H. et al. Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat Commun 17, 3163 (2026). https://doi.org/10.1038/s41467-026-69761-x
Mots-clés: véhicules autonomes, sécurité de la conduite autonome, apprentissage par renforcement, événements rares, données d’entraînement en apprentissage automatique